基于Smart3D的倾斜摄影空中三角测量优化研究
2020-11-10林志东
林志东
(漳州通正勘测设计院有限公司,福建 漳州 363000)
近年来,随着无人机倾斜影像数据处理平台的发展,三维建模在测绘领域得到了广泛的应用。国内外学者在基于影像进行三维模型重建领域进行了大量相关研究。如王丙涛等[1]提出一种基于倾斜摄影测量技术的实景三维建模生产与质量分析方法,掀起了倾斜摄影测量技术的热潮;王胜利[2]提出城市三维场景快速构建的方法,大大提升了三维建模速度;谭仁春等[3]对城市三维建模方法进行了优化,提高了建模精度及速度;周小杰等[4]利用无人机倾斜摄影技术实现免调绘的大比例尺地形图测绘方法。空三测量作为倾斜摄影测量过程的重要环节,其成果质量直接决定着最终产品的数学精度,目前对于空三测量的优化尚缺乏深入研究。本文以莆田市城厢区华亭镇郊溪村为例,以Smart3D倾斜影像三维建模系统为基础,介绍空三测量加密操作方法,分析空三测量中的常见问题并提出相应的解决方案。
1 空三测量原理
1.1 空三测量原理
在倾斜摄影测量中,空三角测量是指利用连续摄取的具有一定重叠度的航摄像片,根据少量野外实测的地面控制点,以倾斜影像数据后处理方法解算获取加密点的平面坐标和高程。空三测量是倾斜摄影测量过程中的一个重要环节,在Smart3D中,空三测量是自动完成的。首先对多视影像进行大量特征点的计算提取,对获取的特征点采用多基线多特征匹配技术自动匹配同名点,然后采用光束法区域网平差方法进行整体平差计算。Smart3D进行光束法区域网整体平差计算时,会自动剔除粗差点,反复进行平差计算、点位调整,直到空三测量结果满足要求,从而得到每张影像精确的外方位元素,以供后续三维重建使用。
1.2 Smart3D空三测量操作步骤
Smart3D空中三角测量包括以下步骤:
(1)数据整理。根据测区范围选择影像,剔除无效影像,整理位置与姿态测量系统(position and orientation system,POS)数据及控制点数据,导出文本格式。
(2)影像导入。新建工程将筛选后的影像导入到工程后,并添加POS数据。为获得最佳性能和效果,Smart3D会根据影像拍摄的物理相机的不同,自动将导入的影像分为一个或多个影像组。
(3)控制点刺点。将野外测量的控制点信息,按照实际位置刺到自动建模系统中。
(4)提交空三测量。控制点刺点完成并检查无误后,再进行空三测量提交即可。
2 莆田市郊溪村空三测量优化实例分析
2.1 测区概况
试验测区位于莆田市城厢区华亭镇郊溪村,测区面积约0.65 km2,地形起伏落差较小。测区房屋密度较大,房屋层数多数为3~5层。经外业实地探勘,该村周边无变电站、无高压电塔,基本具备航飞条件。
2.2 数据准备
本试验使用德国安尔康姆航空科技有限公司的md4-1000四旋翼无人机搭载SONY DSC-RX1RM2双相机航摄系统于2018年1月25日拍摄,采用井字航线飞行方式,共进行8个架次航高为100 m的飞行拍摄,航向及旁向重叠度为75%,获取影像11 874张。本试验区共布设了82个控制点,坐标系统为西安80 坐标系。
2.3 空三测量优化方法
倾斜摄影空三测量在实景三维建模中有着举足轻重的作用,空三测量的精度直接影响后期三维建模等成果的质量,因此对空三测量进行质量优化尤为重要。影响空三测量加密精度的因素有多种,本文主要针对影像质量、像控点布设、内业刺点精度等影响因素,提出一套关于空三测量质量优化的方法,具体如下:
2.3.1 影像质量优化
影像数据的质量直接影响空三测量加密的精度,因此采集航摄照片时需选择固定焦距、大传感器尺寸的相机,结合测区情况适当降低飞行高度,提高影像分辨率。选择晴天作业,航向及旁向重叠度建议设置为70%~80%,这样既能保证建模质量,又能最大程度提高效率。
2.3.2 像控点布设优化
控制点在外业对点的选取一般选择在明显、易于识别、位置固定且便于量测的地方。图1所示为本文采用的像控点布设样式,使用白色和红色油漆在地上画两个顶角相对的等腰三角形。经过多次试飞调整,发现控制点大小以80 cm×80 cm为宜。在制作控制点标志时,特别注意将标志中间的两个三角形刷尖,使控制点标志能清晰显示,提高内业刺点精度。

图1 像控点布设样式
2.3.3 控制点刺点优化
为了避免不同人员在控制点刺点对准确度的影响,本试验采用一人刺点、一人检查的方法,以保证刺点精度。尽量选取控制点位置相对居中、无变形且无遮挡影像进行刺点,如图2、图3所示,这样既能减少影像畸变带来的影响,又能节省刺点时间,提高工作效率。
2.4 常见问题及解决方案
空三测量受航摄相片的重叠度、相机参数、POS数据等各种信息的错误输入及控制点刺点错误等情况的影响,都可能导致空三测量解算出错甚至解算失败。本文经多次实验分析,总结出几种常见的空三测量解算失败情况,并提出相应解决方案。
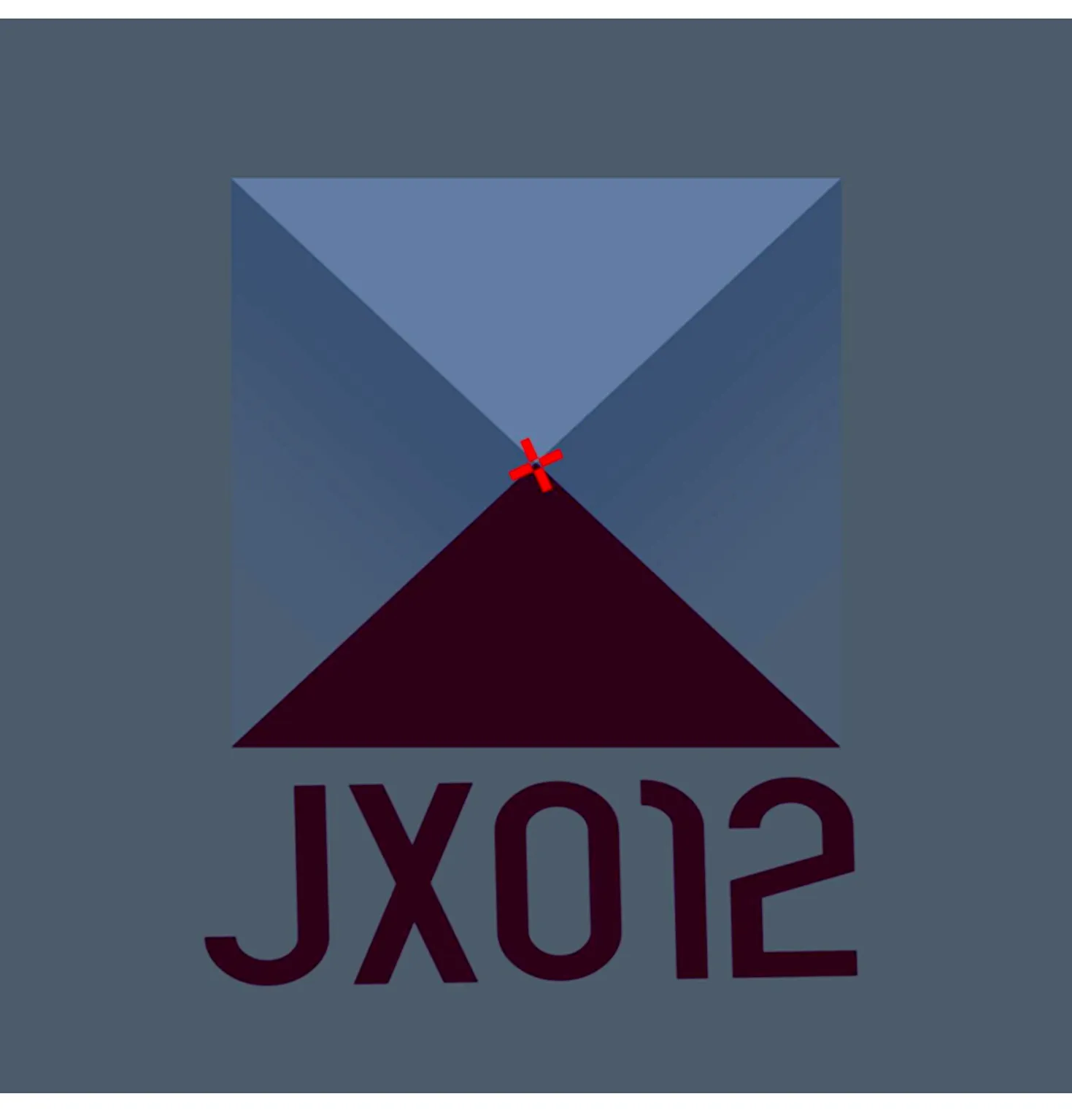
图3 像控点刺点图
(1)影像信息不完整。应重新对每一个控制点进行刺点检查或检查是否所刺点影像房屋立面较多或控制点目标处于影像边缘,必要时可将这类影像适当删减,再重新提交空三测量运算。若对控制点检查时并未发现问题,则考虑是否由于参与空三测量解算的区块太大,建议将区块按航飞架次分区域进行空三测量运算。
(2)多幅影像不能用于重建,漂浮于空中;POS出现分层;连接点及POS整体偏离XY平面;连接点及POS出现严重变形。针对这类问题主要的解决方式为通过修改默认参数,将“关键点密度”由“常规”修改为“高”;将“光学属性评估模式”由“一步”调整为“多步”后再进行空三测量解算。若问题没有得到解决,则再将“切向畸变”、“纵横比”和“倾斜”由“保持”修改为“平差调整”后再进行空三测量解算。
(3)控制点平差精度超限。复制的Block-AT文件,将误差超过 1个像素控制点的相应影像,参考空三测量加密软件平差计算出的控制点位置,进行刺点调整或删除航片上一些质量较差、姿态较差的控制点。若再次加密后仍有个别控制点平差精度超限,则重复空三测量Block-AT文件复制、修改、加密操作,直至最终每个参与计算的控制点的空三测量结果都符合限差要求。
2.5 外业检查精度分析
为验证本次试验空三测量精度,将外业采集房角点坐标与三维模型采集的房角点坐标进行比较分析,结果见表1。
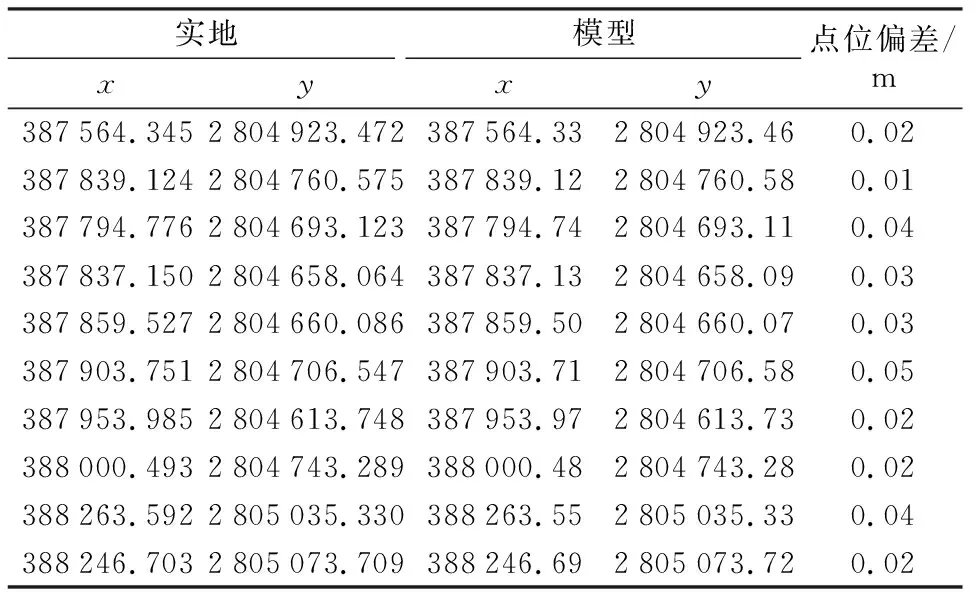
表1 模型房角点取点坐标与实地打点坐标对比
根据表1可以计算得出,模型房角点的点位偏差相对于实地测量的中误差为0.027 m,满足1∶500地籍测量的平面精度要求,本文所述空三精度优化方案可行。
3 结语
空三测量是倾斜摄影建模过程中的一道重要工序,是决定最终成果精度的关键因素。注意每一环节,找到问题的关键点,避免操作过程中的误差积累,并针对问题采取有效的解决措施,才能保证空三测量的精度和质量。本文以莆田市城厢区华亭镇郊溪村的倾斜影像数据为例,利用Smart3D软件进行空三测量加密,提出优化方案来提高空三测量的精度,并针对一些常见问题,提出行之有效的解决措施,最终外业打点验证精度。从试验结果可以看出,此套方法能有效提高空三测量精度,满足1∶500地籍测量平面精度要求。
