散货码头非标准跺位建模数据共享处理技术
2020-11-06张东李伟
张东 李伟


摘要:散货港口在无人化应用方面将堆场单机控制系统数据、中央控制系统数据、堆场垛形数据、策略关键数据等相结合,因此,在处理超高、超宽非标准跺位的情况下,跺位扫描数据是关键信息,可采用建模数据共享技术,这对数据处理方式和系统能力提出了更高的要求。
关键词:无人作业、建模数据、校验与共享
Non - standard stamping terminal modeling data sharing processing technology
ZhangDong、 LiWei
(HuanengCaofeidian Port LTD、
North Branch of CcMEP)
Abstract:Bulk port yard single machine control system in unmanned application data, the central control system, yard crib, strategies, key data such as combination, therefore, in dealing with ultra-high, extra-wide non-standard stamping, stamping a scan data is the key information, modeling data sharing technology, can be used for the data processing method and system ability put forward higher requirements.
Keyword:Unmanned operation, modeling data, calibration and sharing。
1 散貨港口无人作业系统
1.1 无人作业系统的出现
煤码头的生产环节较多,需要卸货、转运、装船等过程。传统的煤码头的生产管理需要很多人力、物力及财力且效率和准确率均得不到保证。
无人作业系统是将散货港口生产管理的智能化和数字化的具体实现。该系统将先进的计算机图形图像技术、计算机软件技术及互联网的技术结合形成,有效整合了人、机、环、安的影响因素,整体提升散货港口效率,是典型的互联网+概念的具体应用的体现。
无人作业系统整合生产管理系统、控制系统的相关作业过程,以垛型三维化、生产过程策略化为抓手,结合空间防碰撞技术,将生产作业标准化、规范化,以达到整体的效率提升。
1.2 无人作业系统原理
近几年,无人作业系统在各散货港口中进入大范围建设,无人作业系统的核心之一,是数据成像,无论在无人作业初始阶段的雷达成像,还是随着激光技术不断成熟逐步应用起来的激光扫描仪设备,精准的形成跺堆形状是在后期指导系统进行作业的关键中的关键。
常规无人作业通过:
实现大机的远程化操作阶段,在中控室内采用操作手柄,进行包括走行、俯仰、旋转等动作;
实现大机设备运行状态及现场图像的远程监控;实现与大机形成的料堆三维扫描成像数据无缝对接,并为自动控制提供数据依据;
实现大机的防碰撞报警、实现安全作业。
实现料场大机无人控制的一体化:人工设定系统任务,系统按照设定的参数自动化取料运行,同时,在特殊情况下,人工可以随时参与中控手柄手动操作,对系统的兼容性、安全性和完整性达到更高层次;
最终无人堆料、无人取料效果达到或超过熟练工人操作能力。
堆料作业:堆料作业方式有长堆辅筑法堆料、定点堆积法,长堆辅筑法堆料的优点是可以形成标准大梯形垛,提高堆场利用率和提高垛型储量,但是,从这些堆法上可以看出堆垛时需要多次调整大臂俯仰角度、多次走行、多次换层,大机机构的反复调整势必造成能耗的提高,从节能减排的角度出发,就需要寻找新的堆法,一是可以形成大垛,垛型存量满足设计要求,二是可以减少机构的反复调整。定点俯仰堆积就是一种常用且高效的堆料方法,其工艺图如下:
取料作业:本取料自动化作业采用旋转分层取料作业方式。旋转分层取料工艺,根据料堆长度又可以分为旋转分层分段取料工艺和旋转分层不分段取料工艺两种作业方式,在华能曹妃甸港的无人作业中,为了使取料效率最大化,采用取料效率高的旋转分层不分段取料工艺。
如图为旋转分层取料工艺的示意图。
旋转分层取料工艺图
旋转分层不分段取料作业,此作业效率最高,可以避免作业过程中由于塌方而造成设备的斗轮和臂架过载的危险,适用于较低、较短的料堆,在作业中臂架不会碰及料堆。为实现“旋转分层等量取料”的目的,在自动控制方式下,按等量取料算法,臂架旋转速度与臂架回转角度成确定函数关系,并根据斗轮驱动电动机的电流进行反馈。此种方式为自动化取料采用的取料模型。
2 非标准垛位信息处理
2.1 特殊垛型的产生与遇到的问题
然而常规散货港口因其在产业链中的特殊地位,港方基于生产作业全过程的考虑,大多数不能形成标准跺,特别是根据客户需求情况在堆场形成超宽、超高垛位已经逐步形成常态,这些垛位不能通过常规无人堆料实现,更无法通过堆料过程进行三维扫描成像,导致使用环境往往不能满足无人作业设定的标准垛位的要求。这直接导致无人作业系统得不到有效的应用,造成大多数用户对无人作业系统的认知偏差。
2.2 建模共享数据处理
以华能曹妃甸港为例,单独一台单机设备因其设备俯仰角度有限的情况及垛位过高而无法完成扫垛建模。为了解决异形跺位成像的问题,我们提出了非标准跺位建模共享数据处理技术,该技术通过建立中间垛型数据存储数据库,将垛位的数据进行实时更新,在作业、非作业两种情况下,对垛位扫描数据同步进行更新,从多方位、多数据源来确定垛型数据,其中间数据库建立以下规则:
(1)数字化高程方式
垛位数据采用规则的数字化高程格网。规则的数字化高程格网是基于数字影像技术,在平面坐标的两个方向按照设定规则排列的连续地理坐标点的平面坐标(X,Y)结合高程信息(Z)形成的数据集合,其中任意某一点P的三维坐标,可根据该点在数字化高程格网中的地理信息及存放在该数字化高程格网文件基本信息相结合通过预定算法计算出来。
(2)数据库基本信息
项目采用oracle数据库,建立料堆数据存放表,按照特定规则进行命名,表格属性应当满足数据存放格式的特殊性,充分考虑数据共享处理的权限、用户等问题,需考虑场存点位分布情况,对应现场的各个堆场堆存信息。
(3)坐标信息规则
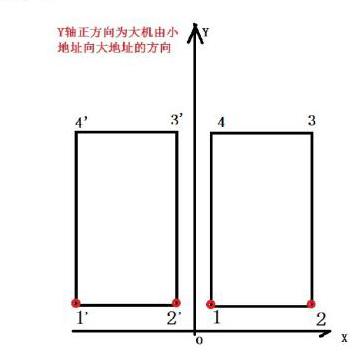
按照场区约定坐标系建立料场坐标,其中Y轴的正方向为走形大地址方向,OY代表现场的轨道中心线,(1234)矩形范围是料场中可以存贮料场数据的地址范围,1点现实坐标(a,b)(固定单位制);2点现实坐标(c,d);3点现实坐标(e,f);4点现实坐标(g,h)。点位范围应当充分满足数据共享处理的边界值和场存动态的优化值,对应数值应当底层关联,避免数据跳变及写入数据出现偏差造成整体数据错误。
(4)数据存储
信息表中,对于数字化高程数据采用的是Blob数据结构(每行固定点数,每个点可分配固定字节数)存储;表格数据位应当与堆场实时地理信息数据对应,定义blob单元数可作为各类数据源的参考项。
3 数据验证
3.1 建立测试模型
以堆场2场为例,找到超宽超高垛位信息,标注信息如下:
3.2 成像测试
扫描垛场为2-7,我们使用两条轨道梁大机分别为S2堆料机和R1-2取料机,按照技术约定及场垛有效范围为图中60米内,现场通过设定3个定点靶向标定物,通过物理尺寸测量以R1-2坝基为基准,依次将标定物在20米、30米中心线及40米处(位置如上图所示),通过S2大机对其进行扫描,扫描过后,在原有数据库扫描图中,发现三辆小车均被扫描到,在共享数据库扫描图中,发现20米处标定物完整图像及30米中心线处标定物边缘图像。
根据数据拼接结果,可分辨出20米处标定物和30米中心线处标定物边缘图像在共享数据库扫描范围内,在定义扫描范围后,通过采用中心數据容错处理技术满足现场对数据采集的需求,
4 结束语
在散货码头中,无人作业技术已开始广泛应用,非标准跺位信息处理已成为极为普遍的需求。随着港口生产过程的不断变化,非标准跺位下超高、超宽跺位会更多的出现在生产过程中,该工况下的数据处理技术将为非标准跺位下进行散货港口无人作业提供依据,同时该技术已应用于华能曹妃甸港的生产过程中。能够承接无人作业系统对现场数据采集的需求,同时也能够实时反馈现场跺位数据,为生产管理人员、技术开发人员提供指导,从而提升散货港口无人作业生产应用水平。
5 参考文献
[1]DavidM.Kroenke,(冯飞译)数据库原理[J]工业技术,2008
[2]李增祥,数据库技术及应用[J]电子工业出版社,2018
[3] Steve,Hoberman,霍伯曼 著,丁永军 译数据建模经典教程第2版人民邮电出版社,2017
