ARPA雷达与AIS数据融合的必要性和AIS-ARPA系统研究
2020-10-31袁富春
袁富春
(武汉船舶职业技术学院,湖北武汉 430050)
随着航海业的发展,船舶导航设备朝着更加先进和综合性发展,但是目前SOLAS公约要求配备的船载导航ARPA雷达和AIS设备,在船舶导航功能上虽然各具优势,某些方面可以互补,却又不能完全替代,造成操作人员在设备操作上增加了劳动强度,有时会导致错误判断,甚至导致海上事故的发生。如果能把ARPA雷达和AIS数据融合,达到性能综合优化,应该是船载导航设备发展的将来趋势。
1 当前船用雷达和船载AIS设备的功能
目前安装在船上的导航雷达和AIS设备,都是按国际相关公约规范安装的重要导航设备,操作人员通过利用这些设备提供的数据,可以判断自己船舶所在位置,分析本船与目标之间的态势,运用良好船艺提前合理规避紧迫局面发生,确保船舶水上交通安全与航行环境安全。
1.1 船用雷达功能
国际海上人命安全公约要求:所有客船和300GT及以上船舶必须安装X波段雷达,所有1万GT及以上的船舶,应安装两台雷达(其中至少有一台为X波段),并且要求其中至少一台雷达必须具备目标自动标绘(ARPA-automatic radar plotting aid)功能,还应具有试操船功能,可自动标绘至少20个目标能力,用于船舶导航行动。
船用雷达是航海人员用来进行获得本船位置和引导航行、避免船舶发生碰撞的重要航海设备。雷达波经雷达天线辐射窗口向外辐射,遇到目标反射回来,这种反射回来的雷达波在雷达屏上形成视频回波信号,只能获得目标回波的方位和距离数据。外接GNSS设备的ARPA雷达,以公共参考点CCRP(Consistent common reference point)作为计算参考点,将目标的方位和距离转化成平面显示的数字化经纬度位置信息,供雷达操作人员读取和对态势分析判断。被捕获和稳定跟踪的目标,经由雷达CPU运算后,还能在雷达屏上显示该目标的运动数据(包括矢量方向和大小)。船舶驾驶员即可通过对目标的数据分析、判断,果断采取相应的船舶操作行为。
1.2 船载AIS的功能
对于所有客船和300GT及以上的货船(从事国际航线航行),都应严格遵守国际公约强制规定,船上必须安装AIS(Automatic Information System)设备,公约并且要求从事国内航行500GT及以上的货船也不得晚于2008年7月1日强制安装AIS设备。
操作人员可以通过本船AIS设备读取目标船(安装有AIS设备)的静态信息数据、动态信息数据和航次相关数据,直接获取目标的运动态势。如果AIS与ARPA雷达通过端口数据连接,操作人员还可以直接在ARPA雷达数据窗中读取AIS数据信息,通过目标船的AIS数据信息分析目标船的态势,决定该采取何种避让行动。
2 ARPA雷达与AIS数据融合的意义
2.1 目前两种船载导航设备的局限性
船载ARPA雷达目标数据是雷达波所探测到的目标的反射回波信号,天线向外辐射的雷达波受到外界干扰导致功率衰减或者信号被遮挡时,例如海浪干扰、雨雪天气或者雷达盲区,雷达将无法获得目标回波信号,雷达回波信号具有一定宽度;经由ARPA雷达捕捉目标,计算出目标的轨迹和运动态势,然后在雷达屏上显示出目标的运动矢量,所捕捉目标的运动矢量的始点往往在目标反射面最强处,如目标船的上层建筑比较密集的生活区部分, 矢量大小和方向表示目标运动速度和运动方向(包括相对运动或者真运动)。这种轨迹捕获计算出的数据和目标真实运动之间有一定的延时性,尤其目标快速转向时,雷达无法及时显示。并且,当接近同方位(通常认为在方位夹角在5度以内时)的两个或者多个目标距离太近,雷达回波将对这种目标无法分辨开来。
AIS数据是通过目标安装的AIS设备主动发送无线电波传输过来的,包括船舶技术资料静态数据、本航次相关数据和船舶当时运动状态的数据。船舶运动状态的数据由与目标船AIS设备连接的传感器提供,例如GNSS(全球导航卫星系统)提供位置和速度数据、电陀螺罗经提供航向数据、船用计程仪提供速度信息、传感器向AIS提供旋回速率动态数据等。所显示的目标船矢量始点在目标船AIS设备天线安装的位置,目标显示只是一个点,为了方便观测,以这个目标点为中心,外切一个等腰锐角三角形。AIS信号因为通过无线电波传输,不受气象和盲区影响,只要对方安装AIS设备并且在正常工作状态,本船都能收到对方的AIS信号。但是AIS信号是通过VHF(甚高频波段)传输,会受到作用距离的限制,通常是30海里左右,同时,目标船的状态决定AIS信息播发的时间间隔,见表1。
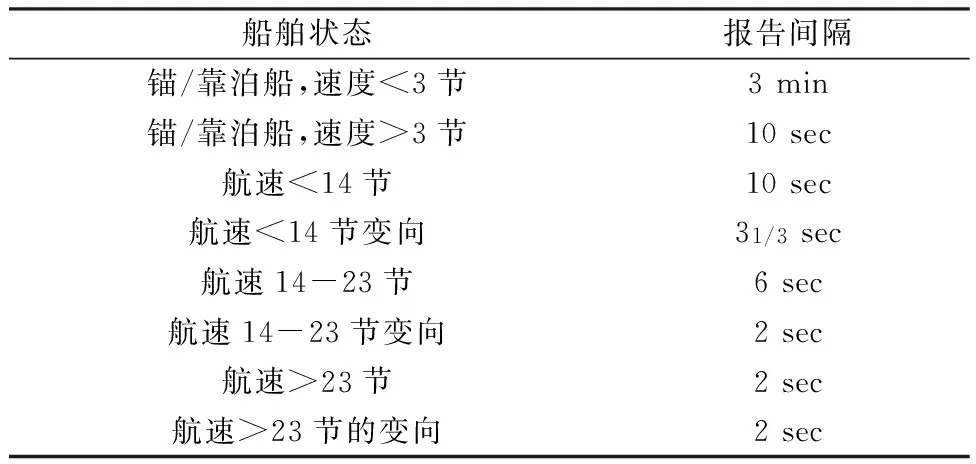
表1 A类AIS信息更新间隔
2.2 AIS与ARPA数据融合的必要性
ARPA雷达天线扫目标时,目标回波最强处为ARPA雷达目标的矢量始点,而AIS数据显示的矢量始点在目标船AIS设备天线安装的位置,在同一个显示屏上,同一个目标矢量始点显示的位置有时候会不重叠。这种同一个目标矢量始点不一致的现象,会导致出现两个矢量始点,两个矢量线,两个矢量方向,使操作人视觉上混淆成两个目标,甚至会造成错误判断,给船舶安全操纵带来危险。如图1所示。深色圆圈是ARPA雷达捕捉目标矢量始点,深色箭头为目标矢量方向和运动速度大小;浅色为AIS矢量始点,浅色箭头是目标矢量方向和运动速度大小。
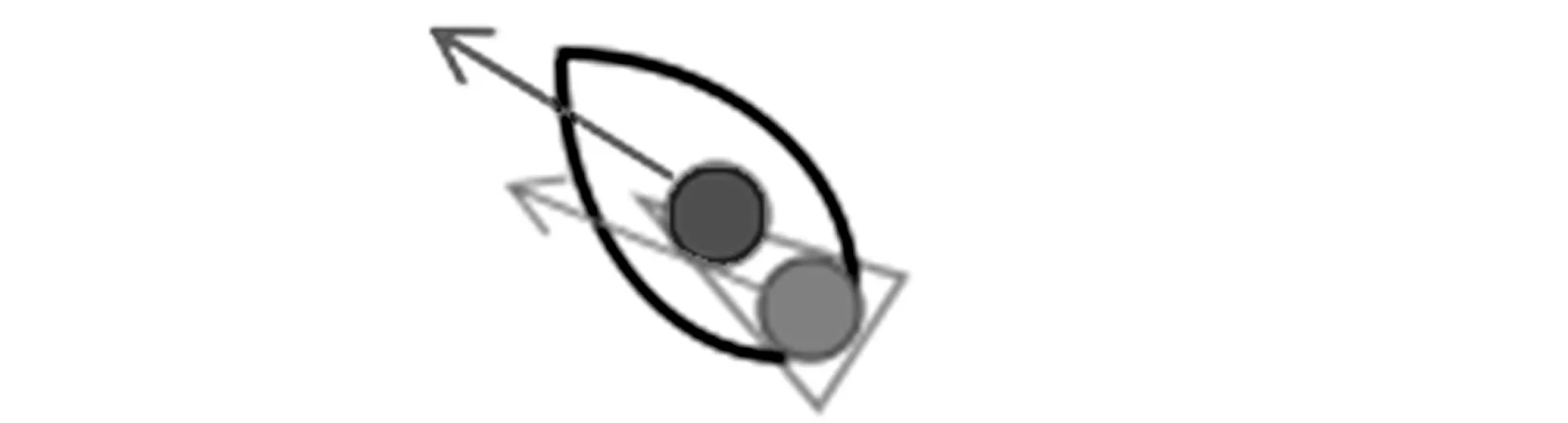
图1 雷达-AIS目标图
3 建立AIS-ARPA系统的意义和可行性
AIS-ARPA系统是本文提出的一套新的导航系统,将AIS数据与ARPA雷达数据通过电气化的有机融合,独立输出显示的船舶导航系统。新系统结合了AIS与ARPA雷达的各自优势,在稳定度、精准度、实用性方面的优越性能大大提高,可以减轻船舶驾驶员的工作强度,增强工作效率和改善导航数据的精确性。
3.1 数据融合技术的可行性
数据融合技术就是把多种传感器如陀螺罗经、GNSS(如GPS、北斗等)、船用计程仪、雷达和自动信号识别系统(AIS)等传输过来的数据进行检测、关联、估计与融合的集成处理,从而获得更准确的数据。因为来自不同传感器,信息数据源会有冗余,但也会有互补,通过数据的合理融合后,得到的信息数据会比单一传感器的数据精度高。虽然多传感器数据中会出现局部数据的不确定性,或者有时也存在局部数据多变性,但是各个传感器数据源之间的互补性,可使得各个传感器在数据融合后,能大大提高系统数据测定的精确度。
数据融合方法一般采用加权平均、贝叶斯估计、多贝叶斯、神经网络、卡尔曼滤波、模糊逻辑法等方法。目前,连接了GNSS(全球导航卫星系统)和电陀螺罗经的ARPA雷达和AIS设备都具有经纬度数字输出功能,本文采用最简单的GNSS数据加权平均法解决目标船的公共参考点、航迹融合和信息输出问题。

图2 AIS-ARPA系统数据融合技术模型
3.2 参考点融合技术
目前商船上ARPA雷达天线旋转速度在20-40 RPM,每分钟至少有20次扫描到同一个目标,即可获取20次同一目标的GNSS数据(φr,λr),按表1中规范的AIS性能技术指标,目标船AIS最长每3分钟传输一次GNSS数据(φa,λa),AIS-ARPA系统将ARPA雷达捕获目标的GNSS数据和目标船传来的AIS数据进行存储预处理,两组数据在3分钟内发生的坐标距离变化不超过50米,即可认定为同一目标,将两组数据按每分钟加权平均处理得出目标运动矢量位于WGS-84(适用于GPS)的坐标系上参考点(φo,λo)。
采用时间对准的方法[1]:ARPA雷达采样时刻N个序列T个:TRj=tRj1, tRj2, ...tRjT(j= 1,2, ...,N) ,AIS采样时刻M个序列F个:TAi=tAi1, tAi2, ...tAiF (i= 1,2, ...,M),选取|tRi-tRi-1|与|tAi-tAi-1|(i=1,2,...,n)这里的基准采样时刻,应该以最小的那个传感器的各采样时刻为准。
3.3 航迹融合技术
对ARPA雷达和AIS传感器输入目标信息数据加权平均处理,φo1=((φrt1+φrt2+...+φrtn)+(φat1+φat2+...+φatm))/(n+m),λo1=((λrt1+λrt2+...λrtn)+(λat1+λat2+...+λatm))/(n+m),航迹融合(φo1,λo1)。其中2sec≦t≦180sec,t=2sec作为倍增基数,m 根据表1,ARPA雷达获取目标数据更新比AIS数据更新快且快得多,实际情况需要结合工程应用和数据的处理速度,也可以综合采用自适应航迹融合算法[2]。传感器数据融合后还需要稳态卡尔曼滤波,继续消除因为噪声和算法引起的误差[3]。 本文根据船用ARPA雷达和AIS设备在航海中实际使用的重要性,提出解决数据融合的方法,设计出一个数据融合的AIS-ARPA导航系统,可以实现设备优势互补,提高导航精度,减轻操作强度,提高工作效率,为航海操作人员作出精确判断提供有效帮助,对确保船舶和水上环境的安全有着极其重要的意义。4 结 语
