齿轮箱振动信号的多小波阈值去噪方法研究①
2020-10-29王旭升吴志光
王旭升,吴志光
(池州职业技术学院机电与汽车系,安徽 池州 247000)
0 引 言
利用传感器从齿轮箱上获得的振动信号一般都是一些非平稳的复杂信号,傅里叶变换虽然可以实现信号由时域到频域的转换,但是这个过程中时间信息就会丢失,这将不利于非平稳信号的分析。目前,小波分析方法在信号处理中使用的比较多,人们利用小波来对信号进行去噪处理,以达到提取特征信号的目的[1-6]。尽管小波已经获得了比较好的应用效果,但是基函数的选择有限,于是人们构造了多小波函数[7],多小波是将单个尺度函数扩展成多个尺度函数,它克服了单小波的某些不足,还具有时频局部化特征,这样一来就可以获得更大的自由度,并且在某些方面取得了比单小波更好的效果[8-12]。在处理振动信号的过程中,将多小波用于信号的降噪处理,结合自适应阈值估计方法,与Db4小波去噪方法比较,在视觉与质量评价参数上面都取得了比小波阈值降噪更好的效果。
1 多小波的基本理论
多小波本质上就是将单一的小波函数拓展为多维小波函数,使得在选取小波函数的时候就变得更加方便灵活。假设r重尺度函数为φ(x),小波函数为ψ(x),r×r 的矩阵Hk和Gk满足矩阵的尺度方程如下:
φ(x)=∑Hkφ(2x-k)
ψ(x)=∑Gkφ(2x-k)
(1)
多小波的分解和重构公式如下:
(2)
(3)
(4)
式中sj-1,n为r维低频分量;dj-1,n为r维高频分量(一般r=2)。与单小波不同的是公式中sj,k是r维列向量,Hk,Gk是r×r大小的矩阵,所以在使用该公式前必须对信号进行预处理,就是将一维信号变成r×N维信号,然后信号经过分解与重构,最后进行后处理也就是将r×N维信号变回一维信号。
GHM由Geronimo,Hardin和Massopus构造的多小波体系,即 GHM多小波[13]。对于传统的小波来说,可以根据一个低通与高通滤波器系数来构造。而对于多小波来说,这些系数都应该是矩阵。GHM多小波包含的2×2滤波器的系数矩阵分别为:
CL3多小波是CL多小波体系[14]中的一种多小波函数。其滤波器系数矩阵为:
对于SA4多小波来说,它的滤波器系数矩阵可以表示成:

2 多小波阈值降噪方法
传统的阈值去噪方法对每层分解系数选用统一的固定阈值,必定会使得一些有用的信息也一起被去除了,这样就会使得部分噪声信号被留下来[15]。因此,本文将根据各层高频系数的噪声水平一个各层系数的能量自适应的选择各层的阈值,将该方法称为自适应阈值去噪。该方法的具体实现过程如图1所示:首先需要设计一个合理的预处理滤波器对含噪信号进行预处理,接着对处理后的多维信号进行分解,接着根据分解后的各高频系数特点使用设计的阈值进行去噪,然后实现系数重构,最后再对信号进行后滤波处理,这个步骤与预滤波处理是相反的过程。Strela[16]认为有两种多小波的预处理方法:一种是将原数据复制到第二行数据,对两行完全一样的数据进行多分辨率分解;一种是利用预滤波器来处理原始数据。实验过程中依据 GHM多小波的特性,选用的是重复行采样预滤波[17],可以获得更好的效果。
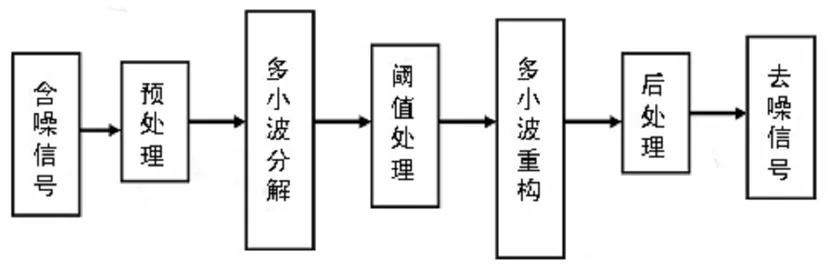
图1 多小波阈值去噪过程

(5)
(6)
(7)

3 实验结果与分析

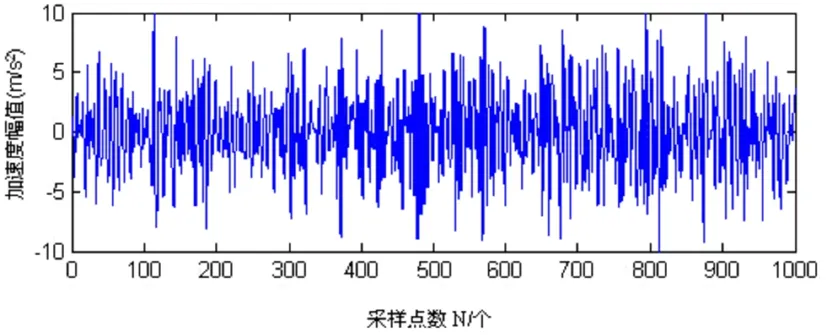
图2 振动信号
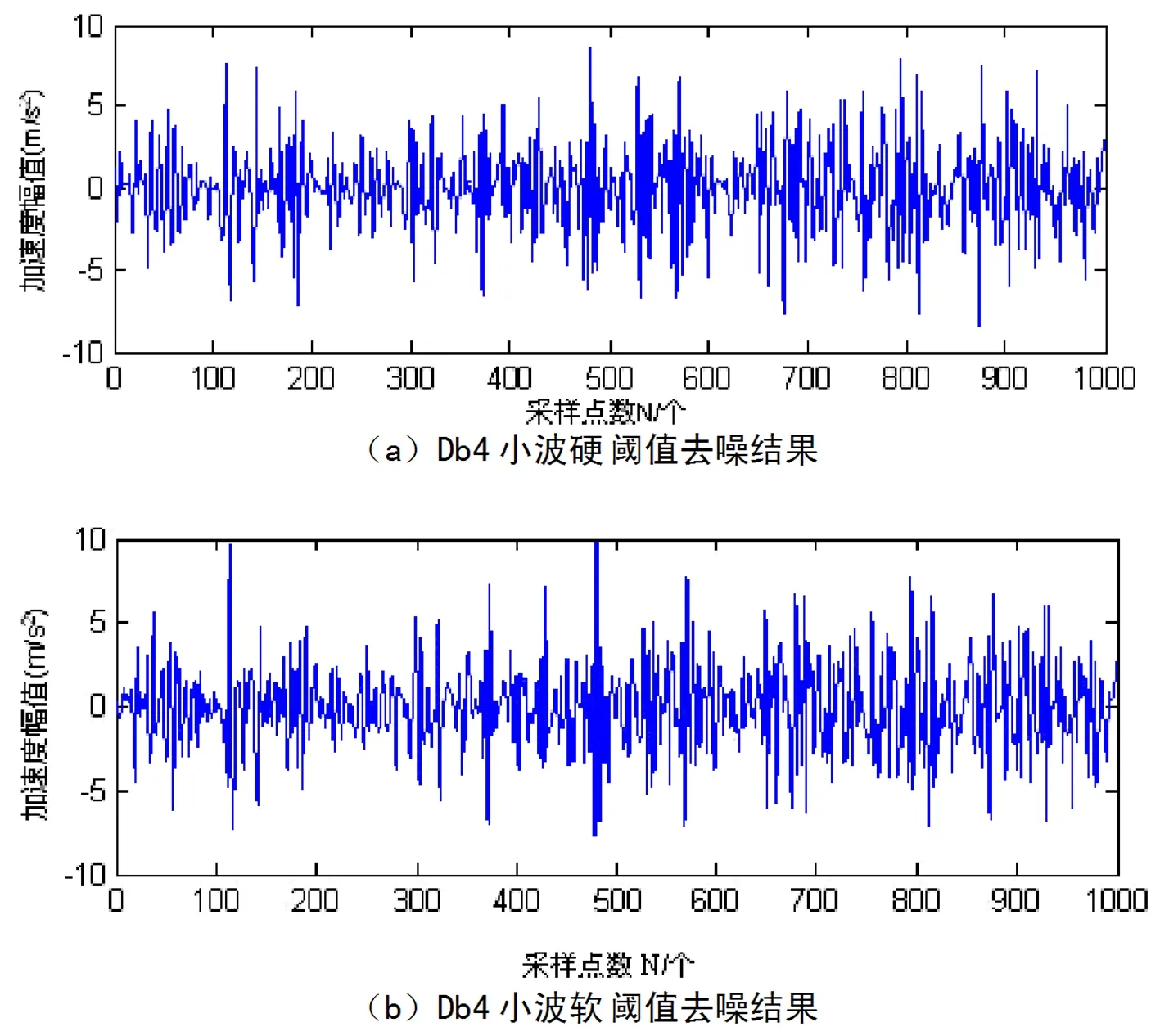
图3 Db4小波阈值降噪结果
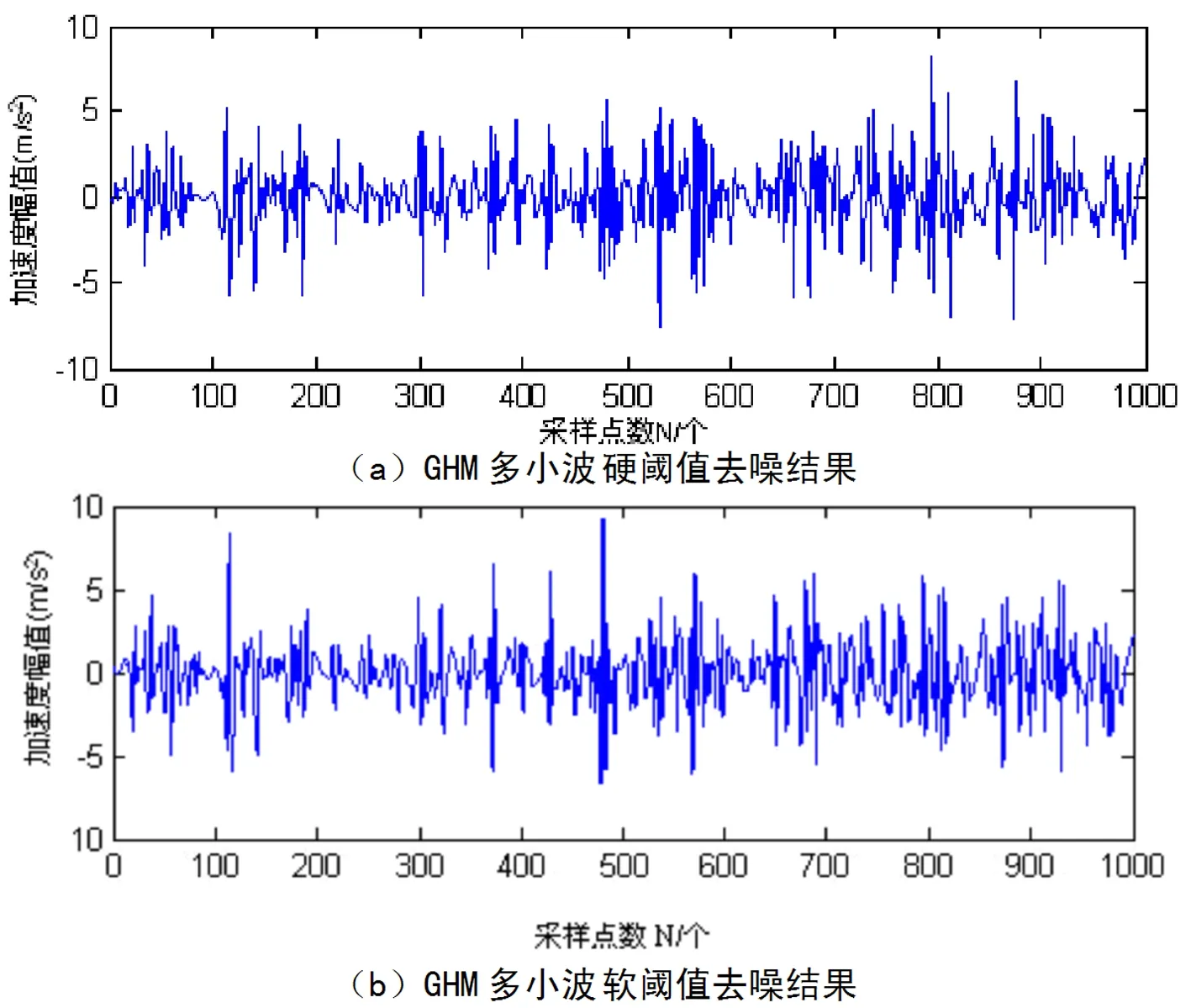
图4 多小波降噪结果
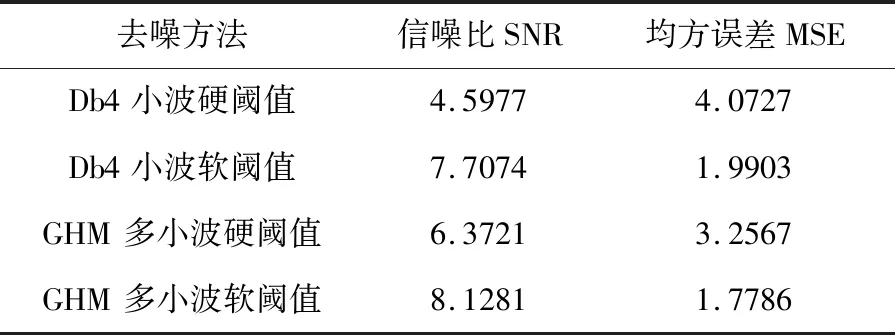
表1 定量评价指标
4 结 语
实验表明,在汽车齿轮箱振动信号去噪的过程中,根据GHM多小波分解后的高频系数估计噪声的标准差,结合各层高频系数的能量比自适应的选择各层的阈值,与传统的小波每层采用固定阈值去噪相比,不仅能够有效的去除噪声,而且可以很好的保留原来有用信号的特征信息,同时还可以获得比较大的信噪比以及比较小的均方误差。今后,对于不同的多小波,需要选择什么样的预滤波器以及对该滤波器设计方案的评价都将值得进一步研究。
