基于噪声卷积调制的SAR虚假信号生成新方法
2020-10-24黄大通邢世其刘业民李永祯肖顺平
黄大通 邢世其* 刘业民 李永祯 肖顺平
①(国防科技大学 电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
②(中国人民解放军第32579部队 桂林 541001)
1 引言
合成孔径雷达[1](Synthetic Aperture Radar,SAR)作为一种高分辨率成像雷达,具有全天时、全天候和透视性等优良特性,被广泛应用于情报搜集、战场监控以及导弹末端图像匹配制导等众多军事领域,已成为现代战场“察打一体化”武器系统的核心传感器[2,3],对我军重要的军事设施和部署构成了极大威胁。鉴于此,展开针对SAR干扰技术的研究,对提升我国的国土防御能力和战时生存能力都具有重要军事价值。
SAR干扰技术可分为压制干扰[4]和欺骗干扰[5],其中普通噪声干扰与SAR信号间不具备相干性,因此对干扰机发射功率需求较大,易受到敌方的反辐射打击;而欺骗干扰则需较多的高精度侦察参数,算法复杂度较高,干扰实时性较差,不利于工程实现。1999年,国际著名电子战专家Schleher[6]在《Electronic Warfare in the Information Age》一书中提出了“灵巧噪声干扰”的概念,由于该类干扰具备自动瞄准信号频率,可获得雷达信号处理增益以及调制方式灵活、干扰效果多样等优点,因此一经提出便受到了科研工作者的广泛关注[7–16]。文献[11]通过对灵巧噪声干扰输出要求的逆向研究,推导出了其卷积调制的数学模型。文献[12]分析了灵巧噪声干扰对SAR系统所具有的特点和优势,提出了利用数字射频存储器来实现干扰调制的方法。文献[13]提出了随机脉冲卷积的干扰方法,通过控制随机脉冲的时延和范围,以此控制干扰带宽度。文献[14]则通过选取不同的噪声时长以及噪声筛选门限值来产生密集假目标干扰,兼具了欺骗与压制效果。文献[15]研究了相干和非相干情况下的噪声卷积的效果,指出可通过改变干扰调制函数产生欺骗和压制的效果。文献[16]研究了脉冲卷积调制干扰对超宽带SAR的效果。然而,上述的传统噪声卷积调制干扰却在距离向始终滞后于干扰机,无法掩护其前方场景,且干扰分散于整个方位向,其能量利用率较低。
针对以上问题,本文提出了一种对传统噪声卷积调制干扰的改进方法,其创新之处在于:通过快时间移频调制,实现了对干扰距离向位置的灵活控制,解决了传统噪声卷积干扰滞后的问题;通过对噪声调制模板的慢时间域滤波,实现了对干扰方位向压制范围的精准控制,提高了能量利用率;由于本文所提的方法是在离线模式下对噪声调制模板作预处理,因此不会影响干扰实时性,便于工程实现。
本文的主要内容分为3个部分,第1部分首先建立了干扰的信号模型,进而推导分析了其对SAR的干扰效果;第2部分对所提干扰方法的性能作了理论分析;第3部分通过仿真实验对所提方法的干扰效果作了验证。
2 基于噪声卷积调制的SAR干扰改进方法
2.1 对SAR的干扰信号模型
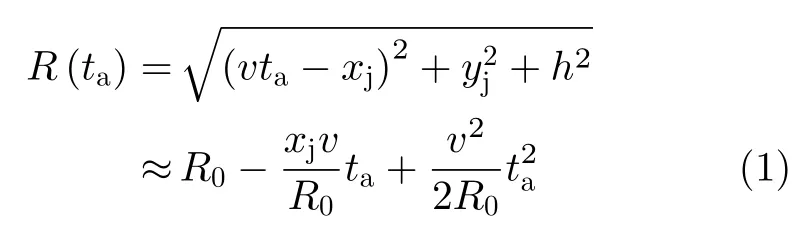
在图1所示的干扰场景几何模型中,SAR平台在高度h的航迹线上以速度v沿x轴正向飞行,记慢时间ta0的地面投影为坐标原点O,平台位置为(vta,0,h)。场景中部署了一部干扰机,其坐标位置为(xj,yj,0),则经泰勒公式[1]展开后干扰机到SAR平台的瞬时斜距为
雷达发射信号为线性调频(Linear Frequency Modulation,LFM)信号

式中,tr表示快时间,Tp为信号时{宽,kr表示调频斜率,fc为信号载频,
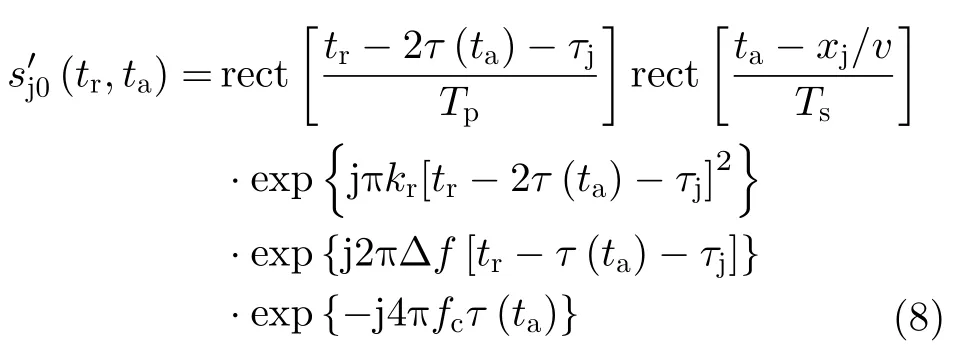
为破坏SAR系统对重要军事设施和部署的侦察,干扰机在被雷达波束照射的合成孔径时间内,对其信号进行截获,并作下变频处理。

式中,si(tr,ta)表示干扰机的截获信号,⊗表示快时间上的卷积运算,表示雷达到干扰机单程斜距的时延,c为光速。
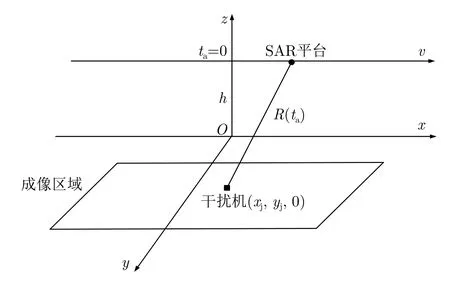
图1 干扰场景的几何模型Fig.1 The geometry model of jamming scenario
根据LFM信号的时频耦合特性[17–20]:信号频率的偏差将造成其时延的改变,故干扰机对截获信号作式(4)所示的移频调制,以此实现对干扰距离向位置的控制。

式中,∆f为干扰机的移频调制量。
接着,干扰机将调制信号m1(tr,ta)与预先载入的噪声作卷积处理。

式中,n(tr,ta)是快时间宽度为Tn,慢时间宽度为Ts的二维高斯白噪声调制模板,Ts为雷达的合成孔径时间,噪声模板在快、慢时间上均表现为非相关。
最后,干扰机将调制信号m2(tr,ta)经上变频处理后,形成干扰信号sj(tr,ta)。

其中,τj为干扰机的固定转发时延。
由此,雷达接收到的基带干扰信号为

2.2 对SAR的干扰结果分析
下面以经典的R-D成像算法[1]为例,对SAR的干扰原理作推导分析。SAR系统对接收到的基带干扰作距离向压缩和距离迁徙矫正后,即有

鉴于SAR信号带宽较大,sinc(·)函数可近似为δ(·)函数[22],故式(9)所示的干扰距离向压缩结果可近似为

在方位向上,为便于作进一步推导分析,只考虑式(10)中的慢时间项[23],并代入式(1)所示的瞬时斜距,则慢时间上的干扰信号可近似为
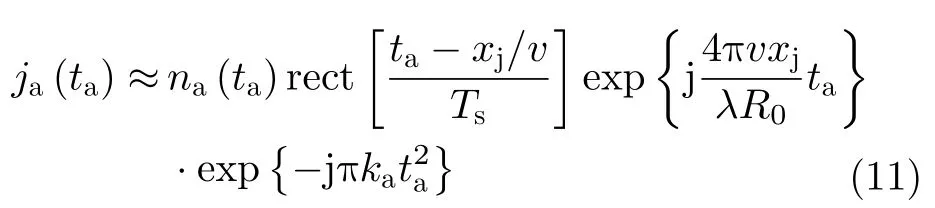
式中,na(ta)仅为慢时间上的噪声,是方位向调频斜率,λ为信号波长。
显然,式(11)即是对LFM信号的噪声乘积调制干扰模型[24],噪声na(ta)可看作是分布在频谱上的无数个单频信号的合成,如式(12)所示(忽略幅度的影响)。

其中,Bn为噪声模板的慢时间单边带宽。
则式(11)可转化为
由此可得干扰的方位向压缩结果

综上所述,在距离向上,由式(10)可知,干扰的成像结果等效于将噪声模板作平移,噪声的起始时刻为2τ0+τj−∆f/kr,压制时长为Tn。故,干扰方可通过设置移频调制量 ∆f和噪声模板的快时间长度Tn来实现对干扰的距离向压制位置和范围的灵活控制,具体计算方法分别如式(15)和式(16)所示。然而,移频调制却是以干扰功率的失配损耗为代价[25–28],因此移频量往往不易过大。反之,对于传统噪声卷积调制干扰,由于移频量∆f0,故噪声将始终滞后于干扰机,无法掩护其前方场景。

式中,∆Rshift为干扰方设定的距离向偏移量,∆Rshift>0,向后移动,∆Rshift<0,向前移动;∆Rj为干扰方设定的距离向压制长度。
在方位向上,由式(14)可知,干扰的压制范围取决于噪声模板的慢时间单边带宽Bn,因此本文所提的干扰方法通过在离线状态下预先对噪声调制模板作慢时间域的低通滤波,限制其慢时间带宽,以控制干扰的方位向压制范围,具体计算方法如式(17)所示。反之,对于传统噪声卷积调制干扰[15,22],由于噪声模板未经过滤波处理,因此其干扰能量将扩散于整个方位向。

式中,∆Xj为干扰方设定的方位向压制长度,fstop为低通滤波器的截止频率。
3 对SAR干扰性能的理论分析
3.1 侦察误差的影响分析
由于本文所提干扰为相参干扰,干扰的执行必然离不开对SAR平台相关参数的侦察,因此有必要分析侦察误差对干扰效果的影响情况。从上一小节可知,调制干扰所需的侦察参数包括信号的调频斜率kr,SAR平台飞行速度v,信号波长λ以及干扰机与雷达间的初始斜距R0,设其对应的绝对侦察误差分别为∆kr,∆v,∆λ以及∆R0,则可将相应的相对误差分别记作∆kr/kr,εv∆v/v,ελ∆λ/λ以及∆R0/R0。根据式(15)和式(17),可得侦察误差下的移频调制量和滤波器截止频率分别为
结合式(10)和式(14),可得侦察误差下的干扰距离向起始位置和方位向压制范围分别为
可以看出,侦察误差并不会影响干扰的输出形式,只会造成实际干扰结果与预定效果的偏差:干扰的距离向起始位置与εkr成正比,而干扰的方位向压制范围则与εv成正比,与ελ和εR0成反比。因此,即使在侦察设备不能提供准确雷达参数的情况下,我方依然可以利用先验信息(如典型SAR场景的参数范围),采用直观估值的方法估计出来,完成对场景的掩护,故本文所提的干扰方法对侦察设备的要求较低,战场生存能力强。
3.2 功率增益分析
对常规噪声干扰,由于其与雷达信号间不具备相参性,无法获得信号处理增益,故对干扰功率的需求较大[29];对传统噪声卷积调制干扰,其仅能获得距离向信号处理增益,无法控制干扰的方位向能量分布。然而,本文所提的干扰方法却可获得雷达的二维信号处理增益,降低对干扰功率的需求。
在距离向上,与传统噪声卷积调制干扰的分析方法相同,这里不考虑移频调制的影响。从式(5)可知,压缩前的干扰信号时宽为Tn+Tp;从式(9)可知,压缩后的雷达信号时宽为1/Br,噪声调制模板不变,故压缩后的干扰信号时宽为Tn+1/Br。由于压缩网络是无源,故压缩前后的干扰能量保持不变,即有

式中,Ji和Jo分别为距离向压缩前后的干扰功率。
从而推得干扰的距离向增益Gr为

可以看出,在SAR信号的时宽带宽一定时,干扰的距离向增益直接取决于噪声调制模板的快时间宽度:当Tn≫1/Br时,干扰增益近似为1,即未获得任何信号处理增益,干扰效果与常规噪声干扰相同,而由式(16)可知,此时干扰的距离向压制范围却较大;当Tn≪1/Br时,干扰增益近似为Gr≈TpBr,即干扰所获增益与目标回波所获增益基本相等,干扰所需功率将极大降低,但此时的距离向压制范围却很小。
在方位向上,与文献[24]对噪声乘积调制干扰的分析方法相同,由式(11)和(14)所示的干扰模型和压缩结果可知,压缩前后的干扰信号时宽分别为Ts和同样,根据能量守恒定律可得干扰的方位向增益Ga为

可以看出,干扰的方位向增益与噪声调制模板的慢时间带宽成反比:Bn越小,干扰增益越大,而由式(17)可知,其方位向压制范围却将越小;反之亦然。
故,本文所提干扰获得的二维总增益G为

3.3 算法复杂度分析
通过第2.1节的推导分析可知,本文所提干扰方法主要包括了离线状态下的干扰调制和实时调制两个阶段。在离线状态下,干扰机首先产生满足距离向压制范围要求的噪声模板,并将其变换到慢时间频域;接着,结合前期的电子侦察所获参数,按照方位向的压制范围要求,对模板作慢时间频域的低通滤波处理,并将其反变换到慢时间域。在该阶段中,噪声模板的慢时间FFT变换对应的计算复杂度[30]为o(Nslog2Ns),其中o(·)表示“在···量级”或“与···呈正比”,Ns为慢时间FFT长度;噪声模板的慢时间频域低通滤波为向量间的点对点乘积,其相应的计算复杂度为o(Ns);通过逆FFT将调制好的噪声模板变换到慢时间域的计算复杂度为o(Nslog2Ns)。由于以上过程均在离线状态下进行,因此干扰机具有较为充裕的运算时间。
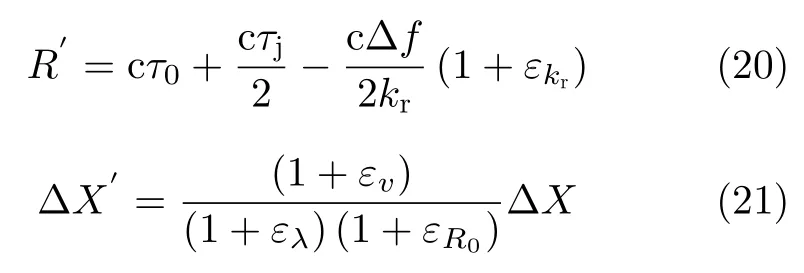
图2 传统噪声卷积调制的干扰结果Fig.2 The imaging results of the traditional noise convolution modulation jamming
在实时调制阶段,干扰机首先对截获信号作快时间移频调制,再将其变换到快时间频域,与噪声模板作频域乘积,最后将调制信号反变换到快时间域。在该阶段中,算法的主要计算量来自于快时间移频调制、快时间FFT变换、向量的点对点乘积以及快时间逆FFT变换,相应的计算复杂度分别为o(Nt),o(Nflog2Nf),o(Nf)和o(Nflog2Nf),其中Nt为干扰机对截获信号的采样点数,Nf为快时间FFT长度。在被雷达波束照射的合成孔径时间内,干扰机会不断截获到每个脉冲重复周期的SAR信号,干扰调制过程会重复进行,因此对实时性要求较高。鉴于在离线状态下已完成了对噪声模板的调制,因此剩余计算量控制在可接受的范围。
4 仿真实验与结果分析
4.1 干扰的有效性验证
在仿真实验中,SAR平台的飞行高度为5 km,飞行速度为 200 m·s−1,工作于正侧视模式;信号载频为10 GHz,脉冲时宽和带宽分别为5 µs和100 MHz,方位向波束宽度为0.03 rad,雷达下视角为45°,脉冲重复频率为800 Hz,成像区域的方位向和地距向范围分别为300 m和400 m。干扰机部署于场景中心,其固定转发时延为0.2 µs。
图2所示为传统噪声卷积调制的干扰结果,其中雷达接收端的干信比为 2.3 dB,噪声模板的快时间宽度采用式(16)所示的设置方法,压制长度分别设置为100 m和25 m。可以看出,干扰能量分布于整个方位向,形成了压制条带,但却在距离向始终滞后于干扰机(固定转发时延的滞后距离约42 m),无法对其前方场景进行掩护。另一方面,图2(a)中的干扰压制范围较大,能量分布较为稀疏,对场景的掩护效果较差;但在图2(b)中,压制范围的缩小使干扰能量更加集中,对局部场景的掩护效果更好。
图3—图5所示为本文所提干扰方法的成像结果,雷达接收端的干信比依然设置为 2.3 dB。当干扰的距离向偏移量设置为–242 m,压制面积设置为300 m×400 m时,干扰实现了对全成像面的压制,如图3所示。然而,鉴于覆盖区域太大,能量分布稀疏,故干扰对场景的掩护效果较差。当同时减小距离向压制范围和噪声调制模板的慢时间频谱宽度时,如图4(a)所示,干扰压制面积将不断缩小,干扰能量愈发集中,对局部场景的掩护效果也会越好,如图4(b)所示。特别地,当压制面积仅为20 m×50 m时,指定的局部场景则被彻底压制,如图5所示。

图3 距离向偏移量∆Rshift=−242 m,压制面积300 m×400 mFig.3 Range offset ∆Rshift=−242 m,suppression area 300m×400 m

图4 距离向偏移量∆Rshift=−142 m,压制面积100 m×200 mFig.4 Range offset ∆Rshift=−142 m,suppression area 100 m×200 m

图5 距离向偏移量∆Rshift=−167 m,压制面积20 m×50 mFig.5 Range offset ∆Rshift=−167 m,suppression area 20 m×50 m
通过以上实验结果对比可知,本文所提的干扰方法成功实现了在固定干扰机下对压制面距离向位置和方位向范围的灵活控制,有效弥补了传统噪声卷积调制干扰滞后于干扰机,方位向能量分散的缺陷,提高了干扰能量的利用率,与理论分析相一致。
4.2 侦察误差对干扰效果的影响
为反映干扰对侦察参数的敏感性和依赖性,这里以图5(b)为基准,考虑较大误差的恶劣情况:kr的相对侦察误差为30%,v,λ和R0的相对侦察误差为50%,干扰结果如图6所示。相比于无误差的干扰结果,由式(20)可计算得kr的误差将导致干扰超前约50 m,干扰的起始位置为4825 m,如图6(a)所示;由式(21)可计算得v的误差将导致压制面的方位向范围展宽到30 m,如图6(b)所示,而λ和R0的误差将导致压制面的方位向范围缩小到13 m,如图6(c)和图6(d)所示。由此可知,即使在侦察误差较大的情况下,本文所提的干扰方法依然能完成对局部场景的有效压制,仿真结果与理论分析相一致。
4.3 干扰增益验证
为进一步验证本文所提干扰方法相比于传统噪
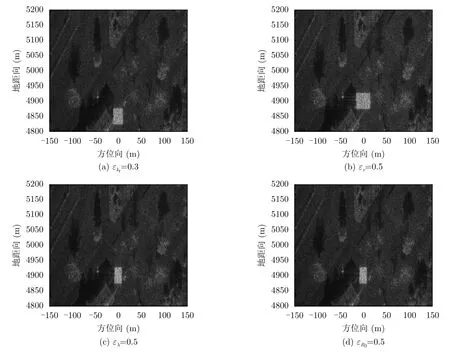
图6 侦察误差下的干扰结果Fig.6 The jamming results under reconnaissance error
声卷积调制干扰的增益情况,表1记录了移频量为零时,噪声模板的不同快时间宽度和慢时间单边带宽对干扰所获增益的影响情况。可以看出,对于传统噪声卷积调制干扰,当不断减小噪声模板的快时间宽度时,其干扰所获增益不断增大,因此对局部场景的压制效果也将越好,与图2的实验结果相吻合。而对于本文所提的干扰方法,当不断减小噪声调制模板的快时间宽度和慢时间带宽时,其所获的增益也将不断增大,因此其对场景的压制效果也会越好,与图3—图5的实验结果相吻合。特别地,在相同的距离向压制范围(快时间宽度为2.4×10−7s)条件下,由于减小了噪声模板的慢时间带宽,本文所提干扰方法获得的增益比传统噪声卷积调制干扰提高了约 13 dB,干扰能量更加集中,有效提高了能量利用率,实验数值与理论数值几乎相等,验证了文中理论分析的正确性。
5 结束语
本文在传统噪声卷积调制干扰的基础上,提出了对SAR的干扰新方法:干扰方通过设置噪声调制模板的快时间宽度和慢时间带宽,直接控制干扰的压制面积;结合移频调制,实现对干扰距离向位置的控制,有效弥补了传统噪声卷积调制干扰存在的距离向位置滞后,方位向压制范围不可控的缺陷。文中首先建立了干扰的信号模型,推导出了其压缩结果的解析表达,并基于此对干扰的压制范围进行了详细分析;接着,文中从侦察误差影响、功率增益以及算法复杂度3个方面对所提干扰方法的性能情况作了理论论证。实验结果表明本文所提的干扰方法可有效实现对干扰的距离向位置和压制面大小的灵活控制,即使在较大侦察误差下仍能完成对局部场景的要地掩护,且相比于传统噪声卷积调制干扰,其在相同条件下所获的增益更大,对要地的掩护效果更好。

表1 干扰增益对比Tab.1 The comparison of jamming gain
