有人机/无人机编队协同作战决策系统架构设计
2020-10-16王新尧孙厚俊王朝阳曹云峰
王新尧,孙厚俊,王朝阳,曹云峰
(1. 南京航空航天大学航天学院,南京210016;2. 洛阳电光设备研究所,洛阳471000)
1 引 言
当前,无人机系统承担的军事任务正在由安全空域执行情报、监视与侦察任务向战场对抗环境下执行对地打击、空战等作战任务方向扩展[1],但由于技术水平的限制,目前现役无人机不具备对意外事件实时响应处理能力,因此在对抗环境中易处于诱骗、干扰和被打击的险境,导致其自卫和空中对抗能力不足,甚至失去制空权。综上,在未来较长的时期内无人机难以在战场对抗环境中实现完全自主作战,其执行任务时还需要由人通过数据链进行操作和控制。然而,现有的“地面站远程异地控制无人机”模式[2],存在数据链中断和决策延时等缺陷,难以支撑无人机在战场对抗环境下遂行作战任务,而采用有人机决策模式,可以实现对无人机的就近指挥。同时,无人机与有人机在认知能力、平台能力、机载传感器和武器性能等方面存在能力互补的天然优势[3]。通过两者优势互补,可有效弥补有人机/无人机能力不足,提高无人机对作战环境变化的应对能力、作战效能和战场生存能力。有人机/无人机编队协同作战将是未来战场中重要的空中作战模式。
有人机/无人机编队协同作战的重点是针对无人机和有人机混合编队,研究多无人机与有人机决策体系结构与架构设计[4-6]、协同任务规划[7-10]、协同成像侦察[11]、人机协作[12-13]等方向。其中人机协作问题是有人机/无人机编队协同区别于传统单一有人系统或单一无人系统的主要问题。人机协作中,操作员的状态、无人机自主程度以及当前态势等变化,会给整个系统带来不确定因素。Marcus Wohler 针对操作员的状态和无人机通信链路的变化,提出了双模认知自动化智能辅助系统架构[12],该架构系统的表述了人与无人机系统的整体结构。然而,该系统架构仍然面临操作员耐力不足的危机,主要原因是原系统的操作员是在地面控制且只需要决策一架无人机,难以实现一架有人机同时指挥引导多架无人机的作战要求。
为了解决上述问题,本文研究了有人机/无人机编队决策系统体系结构,并针对不同场景下对决策结构的适应性要求,将双模认知自动化智能辅助系统架构改进扩展为三模认知自动化决策系统架构,给出操作员决策策略和与智能系统的交互机制,通过提供冗余的任务管理功能,提高操作员指挥多架无人机的能力。
2 有人机/无人机编队系统体系结构
多智能体控制系统体系结构主要是表示多智能体系统中的信息和控制关系,反映该系统的信息存储、共享方式以及问题求解能力的分布模式等[14]。常见的有人机/无人机编队体系结构有:完全集中式(无人机配合有人机,完全依赖有人机决策)、有限集中分布式(有人机协助无人机,无人机具有一定的自主功能,有人机可修正决策)、无中心分布式(无人机能够自主决策,与有人机互补互动)[2]。分别如图1~3所示。
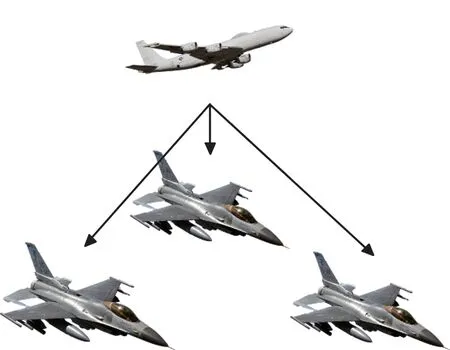
图1 集中式结构Fig.1 Centralized structure
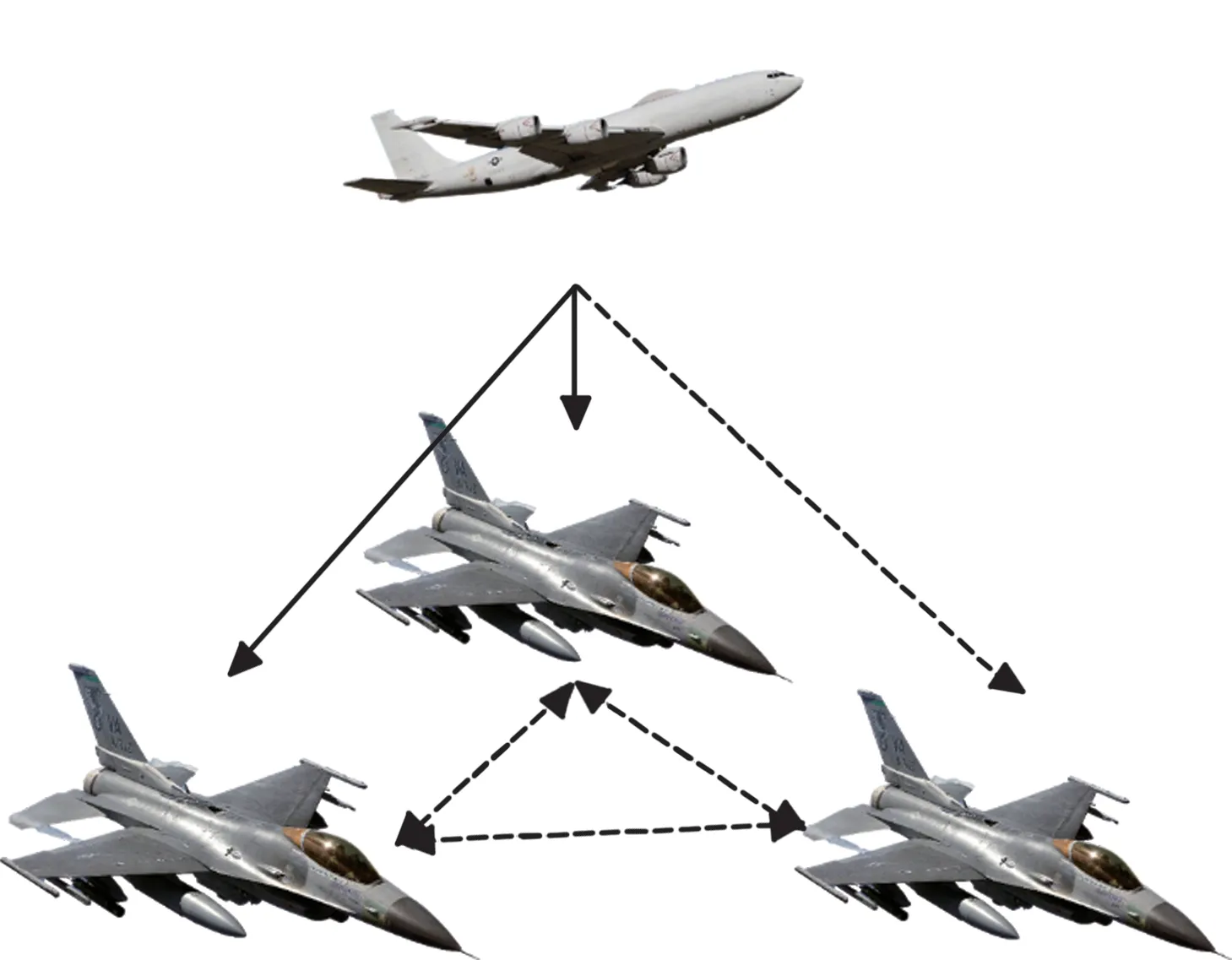
图2 有限集中分布式结构Fig.2 Limited centralized distributed command structure
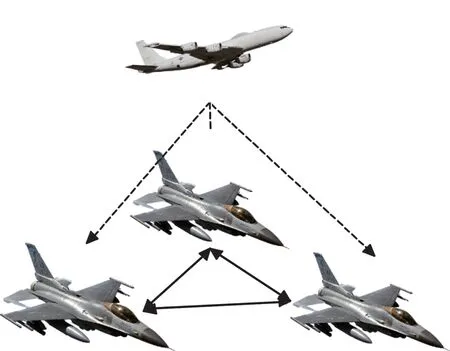
图3 无中心分布式结构Fig.3 Distributed structure
在不同的决策结构中,有人机和无人机的人机功能分配不同[14]。集中式决策结构中有人机直接生成决策指令发送给无人机,无人机之间不通信;全自主分布式指挥结构指有人机不再发送决策指令,决策结果由各个无人机协商生成;有限集中式控制指挥结构是指部分无人机完全依赖有人机决策控制。通常异构无人机会处于不同智能等级或发生通信状态异常等情况,导致无人机对有人机决策依赖程度存在的差异。因此,有必要将三种控制结构集成到一个统一的框架下,根据实际任务需求的不同采取相对应的决策结构,而实现上述功能的关键在于其决策系统的架构设计。
3 有人机/无人机编队系统架构设计
在有人机/无人机编队协同作战决策系统中起到决策功能的智能决策智能体包括人类操作员、有人机机载智能决策辅助系统和无人机机载智能决策辅助系统,如图4 所示,机器人头部所象征机载智能决策系统安装在有人机和每一架无人机上。传统的人机接口(Human Machine Interface,HMI)被扩展到人、机器和智能体的接口(Human Machine and Agent Interface,HMAI),以实现人类和智能体之间通信。智能决策体通过控制机载无人机自身装备的飞行控制系统(Flight Control System,FCS)和飞行管理系统(Flight Management System,FMS),决策无人机执行任务。
将人类操作员工作状态分为“人在回路内”“人在回路上”和“人在回路外”,以适应不同态势、不同操作员状态下对决策主体的需求,“人在回路内”“人在回路上”和“人在回路外”的三种人类工作状态所对应的机载智能决策系统可处于3 种状态,如图5~7所示。
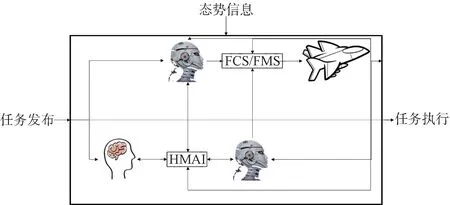
图4 有人机/无人机编队协同作战决策系统组成Fig.4 Manned/unmanned aerial vehicle formation collaborative operation decision system composition
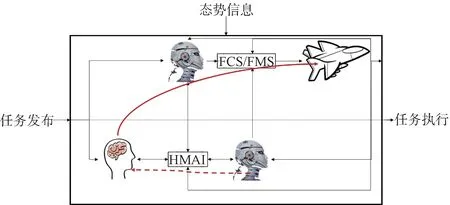
图5 人在回路内Fig.5 People in the loop
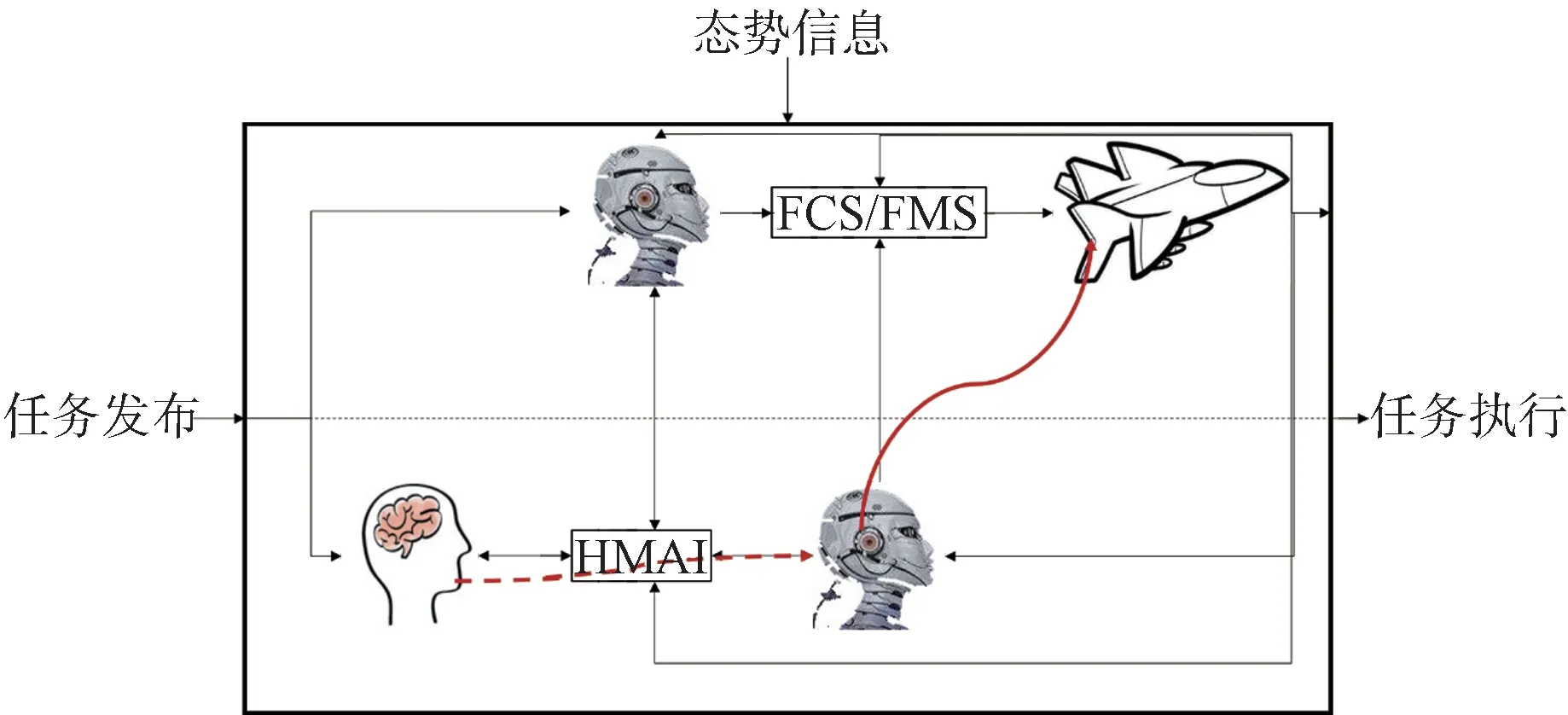
图6 人在回路上Fig.6 People on the loop

图7 人在回路外Fig.7 People off the loop
人在回路内时:工作目标主要由操作人员完成,有人机机载智能决策系统仍在工作,起到提示操作员的功能,对应体系结构为集中式体系结构。无人机机载决策系统负责监督无人机飞行状态和执行任务状态,并将无人机系统状态反馈给有人机。
人在回路上时:当无人机智能程度不足时,人类监督有人机机载智能决策系统决策无人机,无人机机载决策系统仍然只负责监督无人机飞行状态和执行任务状态。当无人机智能程度满足当前任务需求时,无人机可自主协同执行任务,将决策结果反馈回有人机,取代了有人机智能决策系统地位。
人在回路外时:当无人机链路可用,有人机机载智能决策系统取代人类操作员工作;反之,无人机链路不可用时,无人机机载智能决策系统取代人类操作员工作。
由上述可知,除了直接采用有人机机载智能决策系统、无人机机载智能决策系统决策结果和操作员直接输入决策指令外,还有操作员与机载智能决策系统的切换(操作员与机载决策系统的切换机制流程图如图8 所示)。值得注意的是,当有人机/无人机编队中无人机数量大于1 时,对于不同的无人机来说,无人机可处于不同的通信链路状态或不同的自主程度,因此其决策来源也会因此不同。
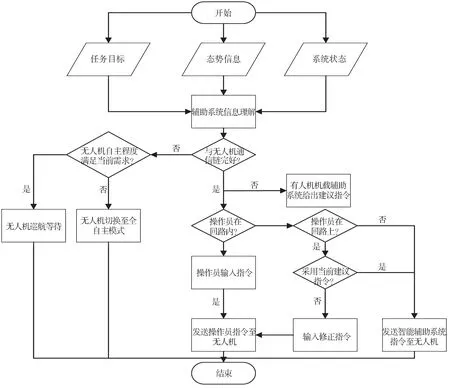
图8 操作员与机载智能决策系统切换机制流程图Fig.8 Flow chart of switching mechanism between operator and airborne intelligent decision system
操作员和有人机机载智能决策系统均可为无人机提供决策指令,实现集中式决策体系结构;无人机机载智能决策系统可实现无人机间协同决策,实现无中心分布式决策体系结构和有限集中分布式控制体系结构。因此,上述架构可以适应不同体系结构的有人机/无人机编队决策系统。此外有人机机载智能决策系统和无人机机载智能决策系统可提供任务管理的冗余功能,提高操作员决策多架无人机的能力。
4 仿真结果及分析
虽然提出的基于三模认知自动化的决策系统架构能够减轻操作员决策无人机负担问题,但该架构也带来存在多个决策指令时可能导致的逻辑混乱的问题。因此,仿真实验的主要目标是对该架构进行决策逻辑验证,避免由于决策主体增加而产生的决策冲突等问题。IBM Rational Rhapsody 可以实现模型与底层代码(C++、Java 或Ada)的双向关联,通过构建架构的动态模型,支持对架构的验证分析,因此选择该工具来构建有人机/无人机编队协同作战决策系统架构的可执行模型[15]。
以有人机/无人机编队协同作战协同对空攻击作战为背景,对有人机/无人机编队协同作战决策系统架构的逻辑合理性进行验证。本项目考虑的影响决策智能体变化的因素主要有:无人机-无人机通信、有人机-无人机通信条件、操作员状态和无人机自主等级,具体如表1所示。

表1 有人机/无人机编队协同作战决策指令来源Table 1 Source of dicision for manned/unmanned aerial vehicle formations
在有人机-无人机通信链路可用状态下,有人机和无人机状态图如图9 所示。当有人机发送send_command(.)(决策指令)转入attack_object(.)(攻击任务)状态,触发make_command_to_air(.)事件,即无人机接受到决策指令,转入air_attack(作战模式)状态。
图9 通信链路正常-有人机/无人机状态图Fig.9 Communication link normal-status diagram of manned/unmanned aerial vehicle
当操作员在控制回路内,发送操作员输入的指令决策无人机时,有人机状态图如图10 所示。auto_desition_assistance(.)(有人机机载决策系统)为操作员建议,但操作人触发not_agree 事件(不同意当前有人机机载决策系统提供的建议指令),操作人状态由polit_on(.)(操作员在控制回路上)转为polit_in(.)(操作员在控制回路内)状态,决策指令由polit_handle(.)(操作员手动输入)实现。
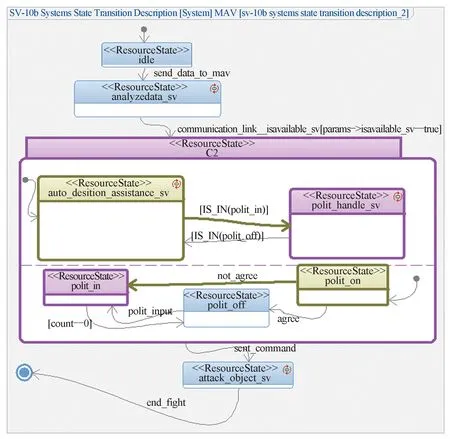
图10 操作员在线-有人机状态图Fig.10 People in the loop-status diagram of manned aerial vehicle
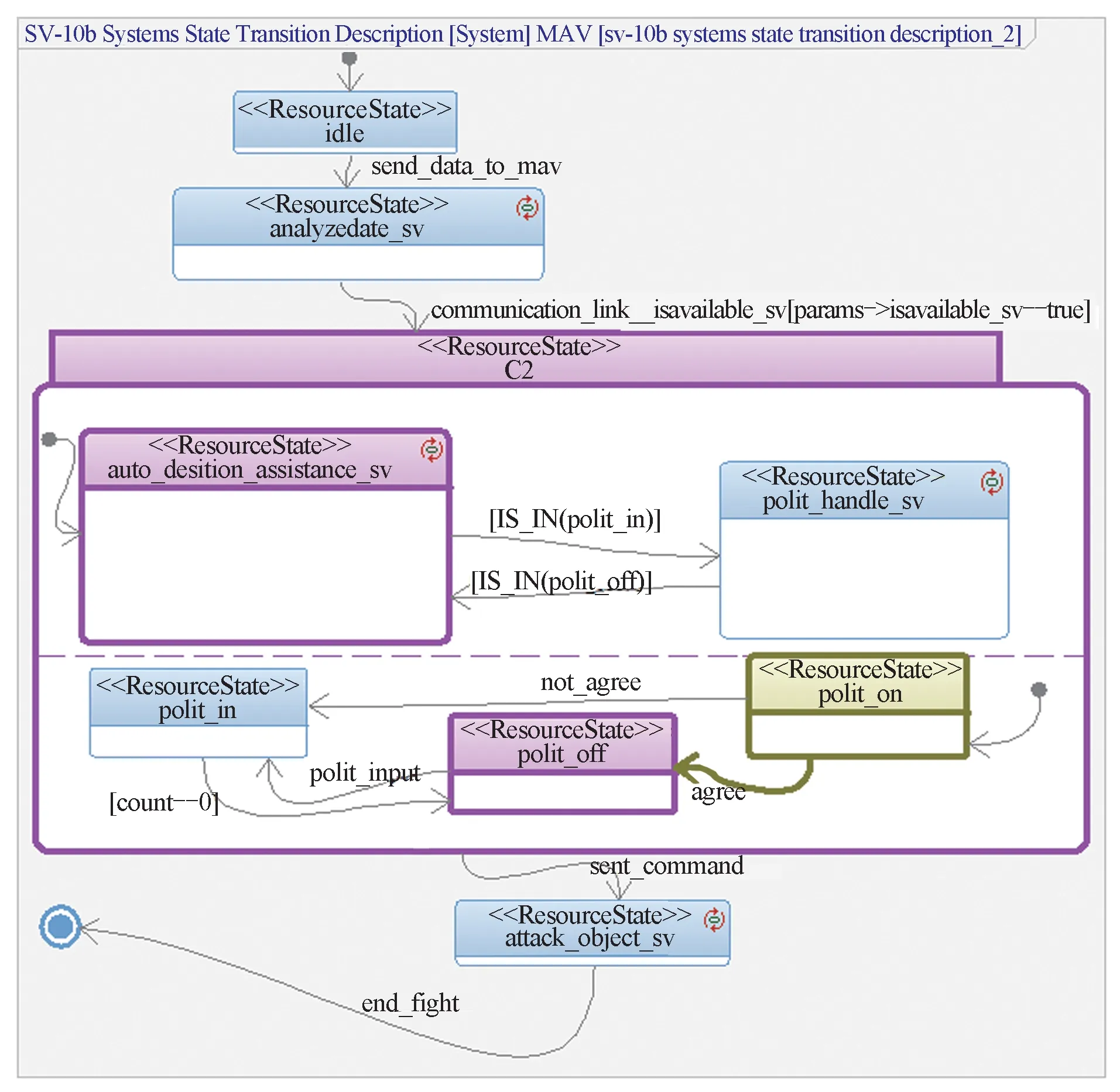
图11 操作员采纳建议-有人机状态图Fig.11 People on the loop-status diagram of manned aerial vehicle
当操作员在控制回路上,但采用了有人机机载决策系统的建议方案,有人机状态图如图11 所示。操作员触发agree 事件,操作员状态由polit_on(.)(操作员在控制回路上)转为polit_off(.)(操作员在控制回路外),直接发送由有人机机载决策系统提供的指挥命令。
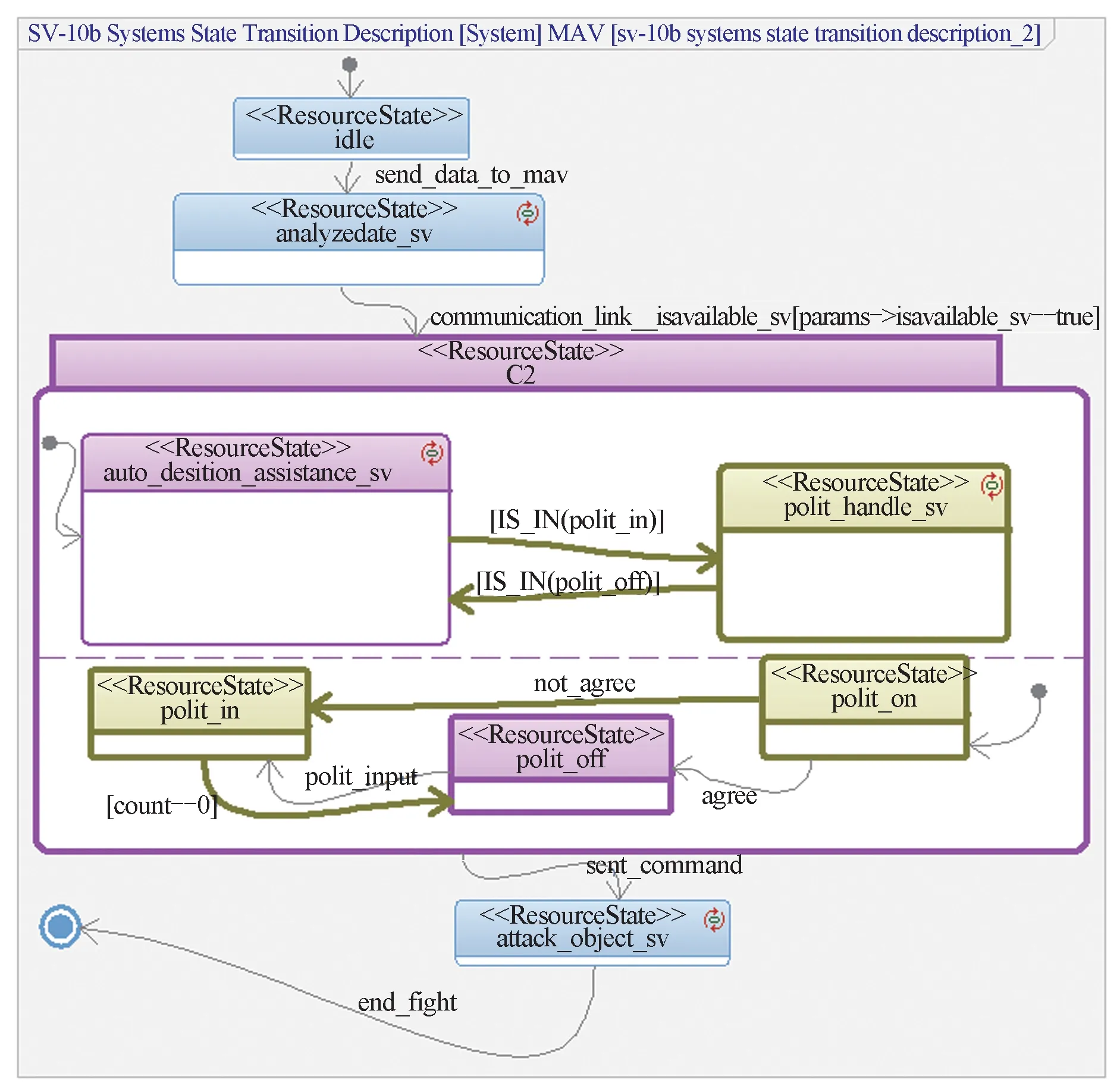
图12 操作员输入超时-有人机状态图Fig.12 People off the loop-status diagram of manned aerial vehicle
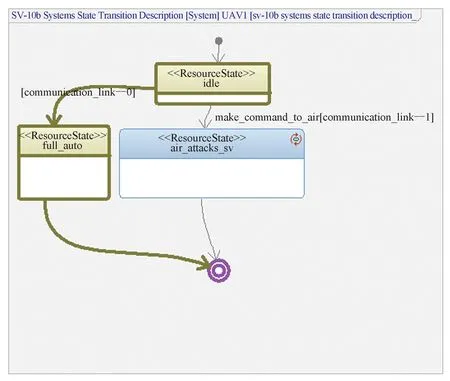
图13 通信链路断-无人机状态图Fig.13 Communication link unnormal-status diagram of unmanned aerial vehicle
当操作员在控制回路上,但由于操作员状态不佳等问题导致输入指令超时,则操作员状态由polit_in(.)(操作员在控制回路内)转至polit_off(.)(操作员在控制回路外),状态图如图12 所示。此时,决策指令仍由auto_desition_assistance(.)(有人机机载决策系统)提供。
在有人机/无人机通信链路不可用状态下,无人机状态图如图13 所示。有人机无法发送决策指令,无人机直接转入full_auto(.)(全自主控制模式)状态。
5 结 论
本文针对有人机/无人机编队协同作战决策系统中三种典型的决策结构,探讨了三种决策结构对有人机和无人机功能分配的影响和对不同任务需求的适应性。提出的三模认知自动化决策架构将三种决策结构集成到一个统一的架构下,架构中作为决策系统的组件有操作员、有人机机载智能决策系统和无人机机载智能决策系统,其中有人机机载智能决策系统和无人机机载智能决策系统可提供任务管理的冗余功能,以提高整体决策系统的鲁棒性和决策能力。仿真实验中,针对有人机操作员负荷、无人机与有人机通信链路状态和无人机自主等级等因素影响,验证了决策指令获取的逻辑,结果表明,面向不同任务需求或处于不同系统状态时,无人机都有效适应并执行任务。
