双馈风电机组双通道扭振主动控制策略研究
2020-10-13田世吉李忠义鲁敏李辉
田世吉 李忠义 鲁敏 李辉


摘 要: 在风电机组的运行中,风速的变化和电网的波动容易引起风电机组传动链的扭振,长时间的扭振会造成风电机组传动链的疲劳寿命损耗,严重时甚至会损坏整个风电机组,影响电网的正常运行。为了减小风机传动链的扭振,提出一种双通道主动阻尼控制方法。该方法通过两个通道形成了一个新的电磁转矩参考值:一个是带频差的比例积分微分(PID)阻尼项,用于减小风机与轴系之间的频差引起的扭振;另一个是采用扭转角([θs])作为反馈信号,由带通滤波器(BPF)和陷波滤波器(BRF)构成附加阻尼项。该方法通过增加附加阻尼,抑制传动链的扭振。最后,利用Matlab/Simulink进行建模与仿真,仿真结果表明,该方法能有效抑制传动链的扭振,且不影响输出功率。
关键词: 双馈风电机组; 传动链扭振; 扭振抑制; 双通道主动控制; 附加阻尼; 电磁转矩
中图分类号: TN876?34 文献标识码: A 文章编号: 1004?373X(2020)19?0084?04
Abstract: In the operation of wind turbines, the transmission chain is prone to torsional vibration due to the change of wind speed and fluctuation of power grid. Too long?time torsional vibration will cause the fatigue life loss of the transmission chain of wind turbines, even damage the whole wind turbines in severe cases, and affect the normal operation of the power grid. Therefore, a two?channel active damping control method is proposed to reduce the torsional vibration of transmission chain of the wind turbines. In the method, a new electromagnetic torque reference value is formed by two channels. One is the proportion integration differentiation (PID) damping term with frequency difference, which is used to reduce the torsional vibration caused by frequency difference between wind wheel and shafting, the other is to take torsion angle ([θs]) as the feedback signal, and form additional damping term by band?pass filter (BPF) and band rejection filter (BRF). This method can suppress the torsional vibration of transmission chain by adding additional damping. The Matlab/Simulink is used for modeling and simulation. The simulation results show that the method can effectively suppress the torsional vibration of transmission chain without affecting the output power.
Keywords: doubly?fed wind turbine set; transmission chain torsional vibration; torsional vibration suppression; two?channel active control; additional damping; electromagnetic torque
0 引 言
近年来,风力发电发展迅速,渗透率越来越高,双馈风电机组是应用最多的风机[1]。由于风电机组所处环境恶劣,冲击载荷大,容易引起故障,其中,风电机组传动链扭振是最严重的问题之一[2]。扭振会导致齿轮箱产生疲劳寿命损耗,在严重的情况下,会造成风电机组损坏进而导致电网故障[3]。由此可见,风机扭振不仅会影响到风电机组的安全运行,而且也会影响到整个电网的稳定性。因此,抑制传动链扭振显得非常重要和紧迫。
已有一些學者对抑制风电机组传动链扭振进行了研究。其中,文献[4]在发电机转矩控制中添加阻尼滤波器,提高控制器阻尼,降低传动系统扭矩波的幅值;文献[5]当风电机组运行在额定风速以上时,将二阶滑膜阻尼频率加到附加转矩上以抑制风电机组传动链的扭振;文献[6?10]研究了风电机组在电网故障下如何减小传动链扭振的控制策略;文献[11?12]通过桨距角控制机械扭矩的方法抑制风电机组传动链扭振;文献[13]提出基于科尔曼坐标变化的独立变桨控制器;文献[14]对风电机组传动链扭振控制的稳定性做了研究,分析了风机的转速和发电机转速作为输入信号时对系统稳定性的影响;文献[15]提出以扩张状态观测器和非线性状态误差反馈的自抗扰控制策略实现对传动系统扭振的控制。文献[16?19]研究了风机在视在最大功率跟踪的情况下对系统轴系扭振进行控制。
由于发电机的转动惯量远小于风轮,因此,电磁转矩的波动更容易造成传动链的扭振。虽然上述方法都能达到抑制风电机组传动链扭振的目的,但大多数是在电网故障情况下,或是通过控制机械转矩的方法来抑制扭振,很少涉及电网正常运行时传动链长期低幅、低频扭振的控制问题。本文提出一种双通道主动控制策略,在保证风电机组输出功率不受影响的前提下,通过控制发电机的电磁转矩,达到抑制传动链扭振的目的。
1 双馈风电机组传动链建模
双馈风电机组传动链主要由风轮、变桨控制系统、主轴前轴承、低速轴、变速箱、高速轴、发电机等组成。风轮吸收的机械能通过低速轴传给变速箱,变速箱的高速输出端与发电机连接。为了提高计算速度且能够准确反映传动链的扭振特性,本文采用两个质量块模型对双馈风力发电机组传动链建模。将叶轮和轮毂视为一个质量块,发电机和齿轮箱视为一个质量块,如图1所示。
将风电机组高速轴各部件转动惯量和刚度折算到低速侧,根据运动学基本方程式可以得到风电机组双质量块传动链运动方程的数学模型为[20]:
2 传动链主动控制策略
2.1 扭振特性分析
根据传动链的两个质量块模型,可得到风电机组传动链关于扭转角([θs])的运动方程如下:
由式(2)可进一步推导出以[Tt]和[Te]为输入变量的传递函数,分别如式(3)和式(4)所示:
根据式(3)和式(4),可得到[θs(s)Tt(s)]和[θs(s)Te(s)]的频域特性,如图2所示。可以看出,无论是电磁转矩扰动还是机械转矩扰动,传动链共振频率附近的幅值增益都很高,也就是说机械转矩和电磁转矩的波动都会引起传动链的扭振。还可以看出,以电磁转矩作为输入时幅值增益高于机械转矩作为输入时的幅值增益,这说明电磁转矩的波动更易引起传动链的扭振。
2.2 控制策略
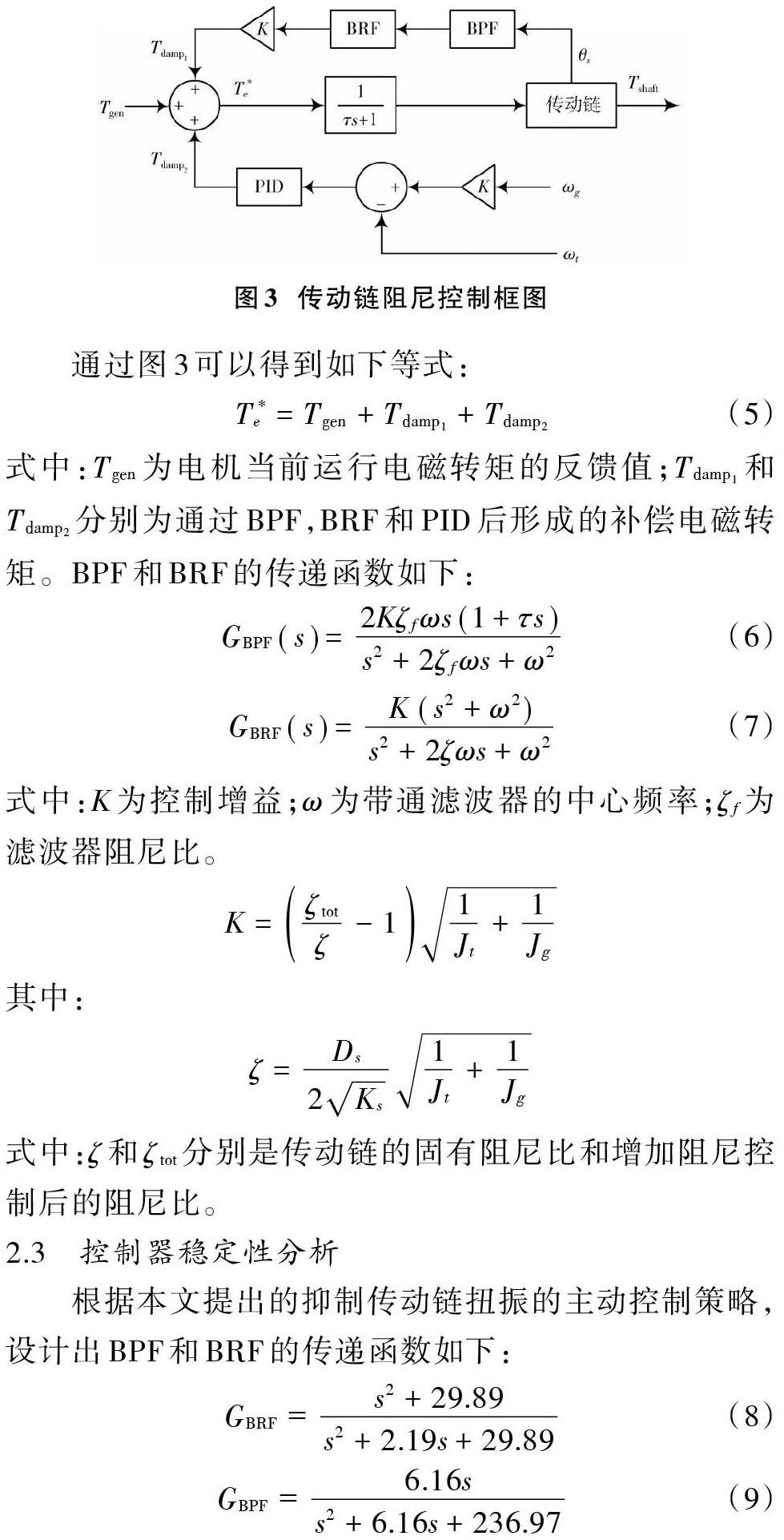
本文在PID控制的基础上,增加一个由带通滤波器(BPF)和陷波滤波器(BRF)构成的转矩反馈回路,实现双通道主动阻尼控制,如图3所示。通过该控制策略,在传动链的固有振动频率附近增加了附加转矩[Tdamp1]和[Tdamp2]。两个通道的作用分别为:BPF主要是产生脉动转矩,BRF主要是为了避开风轮的多阶穿越频率;PID控制可快速准确地消除系统偏差,使系统的振荡和偏差减小。
通过图3可以得到如下等式:
式中:[Tgen]为电机当前运行电磁转矩的反馈值;[Tdamp1]和[Tdamp2]分别为通过BPF,BRF和PID后形成的补偿电磁转矩。BPF和BRF的传递函数如下:
2.3 控制器稳定性分析
根据本文提出的抑制传动链扭振的主动控制策略,设计出BPF和BRF的传递函数如下:
BPF和BRF串联后乘系数[K],支路的伯德图如图4所示。
3 仿真结果及分析
为了验证本文提出的主动控制策略,用Matlab/Simulink仿真软件对1.5 MW双馈风电机组传动链进行建模与仿真,其中,风速输入选择更接近风电机组实际运行状况的湍流风,仿真时间为6 s。双馈风电机组参数见表1,表2。
本文用Matlab/Simulink仿真软件对风电机组传动链建模,为了更接近风电机组运行的真实环境,假设本文所研究的双馈风电机组输入的风能为湍流风况。
3.1 仿真结果
湍流风的波形如图5所示。
湍流风况下电磁转矩的参考值和反馈值波形如图6所示。
传动链输出的机械转矩的参考值和传动链扭转角的波形如图7所示。
两种控制方式与无任何控制下输出功率比较的波形如图8所示。
3.2 仿真结果分析
在湍流风况下,仿真结果图6表明:PID单独控制和采用PID与扭转载荷控制器联合控制的方法所得电磁转矩基本重合,说明本文提出的这种控制策略并没影响电机的正常运行,表明该控制策略在复杂风况下对双馈风电机组传动链扭振具有良好的控制性能,具有普遍适用性。仿真结果图7表明:当只有PID控制时,双馈风电机组传动链的扭振比较严重,当采用本文提出的控制策略時有效地减小了传动链的扭振,说明本文提出的控制策略能很好地抑制双馈风电机组的扭振。仿真结果图8表明:与只有PID控制时相比,PID控制和扭转载荷控制器联合控制时有功功率的曲线基本一致,这表明本文提出的控制策略能够有效抑制传动链的扭振,同时也可以看出在本文提出的控制策略作用下,双馈风电机组的输出功率比未加任何控制策略时的输出功率曲线要高,这说明在本文提出的控制策略作用下会提高双馈风电机组的发电量。
4 结 论
本文首先对双馈风电机组传动系统进行分析,然后建立传动链的两个质量块模型。通过对双馈风电机组传动链扭振特性分析,得出电磁转矩扰动比机械转矩的扰动更容易引起传动链的扭振。为抑制在电网正常运行时传动链的低幅低频扭振,以扭转角([θs])作为反馈信号设计基于BPF和BRF的扭转载荷控制器,提出了PID控制与扭转载荷控制器相结合的双通道主动控制策略。最后在湍流风况下对本文提出的双通道控制策略进行仿真分析,结果表明,本文提出的控制策略对传动链扭振有很好的抑制效果且不影响风电机组的输出功率。
注:本文通讯作者为鲁敏。
参考文献
[1] SALLES M B C, KAY H, CARDOSO J R, et al. Crowbar system in doubly fed induction wind generators [J]. Energies, 2010, 3(4): 738?753.
[2] SHEIKHLOU M, REZAZADEH G, SHABANI R. Stability and torsional vibration analysis of a micro?shaft subjected to an electrostatic parametric excitation using variational iteration method [J]. Meccanica, 2013, 48(2): 259?274.
[3] LIU Libo, XIE Da, CHU Haoxiang, et al. A damping method for torsional vibrations in a DFIG wind turbine system based on small?signal analysis [J]. Electric power components and systems, 2017, 45(5): 560?573.
[4] 邢作霞,刘颖明,郑琼林,等.基于阻尼滤波的大型风电机组柔性振动控制技术[J].太阳能学报,2008,29(11):1425?1431.
[5] BELTRAN B, BENBOUZID M E H, AHMED?ALI T. Second?order sliding mode control of a doubly fed induction generator driven wind turbine [J]. IEEE transactions on energy conversion, 2012, 27(2): 261?269.
[6] FATEH F, WHITE W N, GRUNBACHER D. Torsional vibrations mitigation in the drivetrain of DFIG?based grid?connected wind turbine [J]. IEEE transactions on industry applications, 2017, 53(6): 5760?5767.
[7] HUANG P H, MOURSI M S E, HASEN S A. Novel fault ride?through scheme and control strategy for doubly fed induction generator?based wind turbine [J]. IEEE transactions on energy conversion, 2015, 30(2): 635?645.
[8] 徐浩,胡书举,宋斌,等.电网对称故障下双馈风电机组的载荷优化控制[J].电力系统自动化,2014,38(11):20?26.
[9] 贾锋,王瑞明,李征,等.电网故障下风电机组轴系扭振抑制方法[J].电力自动化设备,2015,35(10):74?80.
[10] 秦世耀,李少林,王瑞明,等.风电机组传动链柔性建模及电网故障响应特性研究[J].太阳能学报,2015,36(3):727?733.
[11] BOSSANYI E A. Individual blade pitch control for load reduction [J]. Wind energy, 2003, 6(2): 119?128.
[12] 赵晶晶,吕雪,符杨,等.基于双馈感应风力发电机虚拟惯量和桨距角联合控制的风光柴微电网动态频率控制[J].中国电机工程学报,2015,35(15):3815?3822.
[13] 应有,许国东.基于载荷优化的风电机组变桨控制技术研究[J].机械工程学报,2011,47(16):106?111.
[14] 廖明夫,金路,孙黎翔,等.控制系统引起的风力机传动系统失稳扭振[J].太阳能学报,2011,32(7):985?991.
[15] 姚兴佳,王晓东,单光坤,等.双馈风电机组传动系统扭振抑制自抗扰控制[J].电工技术学报,2012,27(1):136?141.
[16] 杨文韬,耿华,肖帅,等.最大功率跟踪控制下大型风电机组的轴系扭振分析及抑制[J].清华大学学报(自然科学版),2015,55(11):1171?1177.
[17] ERMIS M, ERTAN H B, AKPINAR E, et al. Autonomous wind energy conversion system with a simple controller for maximum?power transfer [J]. IEE proceedings B—electric power applications, 1992, 139(5): 421?428.
[18] JOHNSON K E, PAO L Y, BALAS M J, et al. Control of variable?speed wind turbines: standard and adaptive techniques for maximizing energy capture [J]. IEEE control systems magazine, 2006, 26(3): 70?81.
[19] 方云熠,曾喆昭,刘晴,等.永磁直驱风力发电系统最大功率跟踪非线性抗扰控制[J].电力系统保护与控制,2019,47(5):145?151.
[20] MULLER S, DEICKE M, DE DONCKER R W. Doubly fed induction generator systems for wind turbines [J]. IEEE industry applications magazine, 2002, 8(3): 26?33.
