基于MATLAB/Simulink的汽车主动悬架控制器的设计与仿真
2020-10-12李滨
李滨

摘 要:本文在建立1/4车辆模型的基础上,根据牛顿运动定律建立动力学方程,并根据现代控制理论的知识建立状态方程,采用最优控制策略,分别对被动悬架和主动悬架进行模拟和仿真。车辆悬架的特性可以从车身垂直加速度、悬架动行程及轮胎动位移进行研究。并对两种悬架的仿真结果进行了详细的比较分析和说明。
关键词:MATLAB;主动悬架;设计与仿真;汽车
0 引言
汽车悬架分被动悬架、半主动悬架和主动悬架,本文主要分析主动悬架的最优控制,并对主动悬架和被动悬架仿真结果进行分析和比较。车辆悬架的评价指标是车身加速度、悬架动行程和轮胎动位移。基于MATLAB/Simulink软件进行仿真。
1 建立1/4悬架模型
1/4悬架模型如下图:
2 LQG控制器设计
LQG控制器设计的性能指标J其表达式为:
(6)
式中,分别为轮胎动位移、悬架动行程和车身垂向振动加速度的加权系数。
将性能指标J的表达式(8)改写成矩阵形式:
(7)
式中,Q对应于状态变量的权重矩阵;R为约束输入信号大小的权重矩阵;N为耦合项。
当车辆参数值和加权系数值确定后,最优控制反馈增益矩阵可由黎卡提(Riccati)方程求出,其形式如下:
(8)
最優控制反馈增益矩阵,由车辆参数和加权系数决定。根据任意时刻的反馈变量,就可得出t时刻作动器的最优控制力,即:
3 仿真输出与分析
选择某轿车的后悬架作为相关计算参数:,,,悬架工作空间,,u=20m/s,,,,,主动悬架,,被动悬架,。白噪声的生成可直接调用MATLAB函数WGN(M,N,P),取M=10001,N=1,P=20。设定采用时间为0.005s、车速为20m/s时,仿真路面长度1km,仿真时间为50s。
根据所建立的系统状态方程式(4)及最优性能指标函数(7),利用已知的矩阵A、B、Q、R、N,调用MATLAB中的线性二次最优控制设计函数,即可完成最优主动悬架控制器的设计。
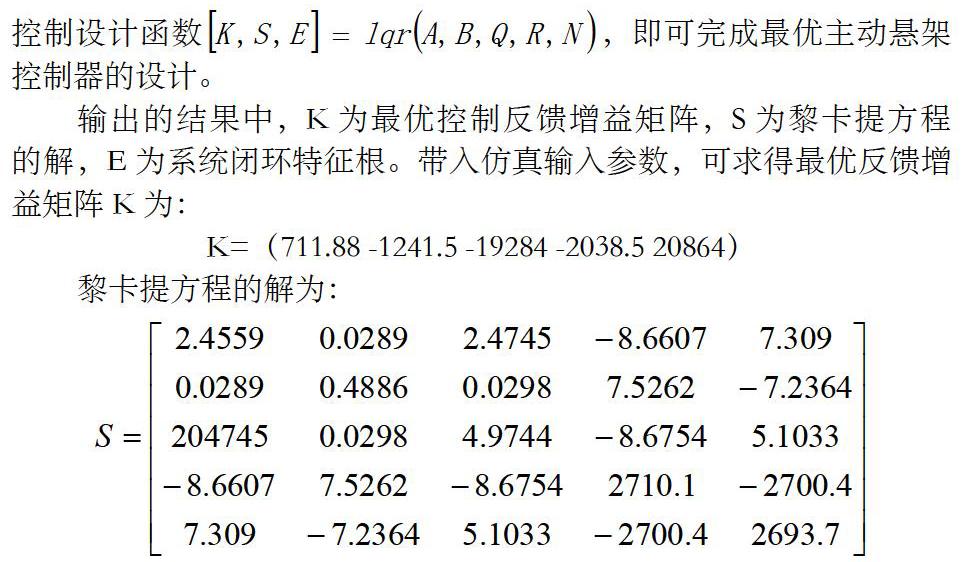
输出的结果中,K为最优控制反馈增益矩阵,S为黎卡提方程的解,E为系统闭环特征根。带入仿真输入参数,可求得最优反馈增益矩阵K为:
K=(711.88 -1241.5 -19284 -2038.5 20864)
黎卡提方程的解为:
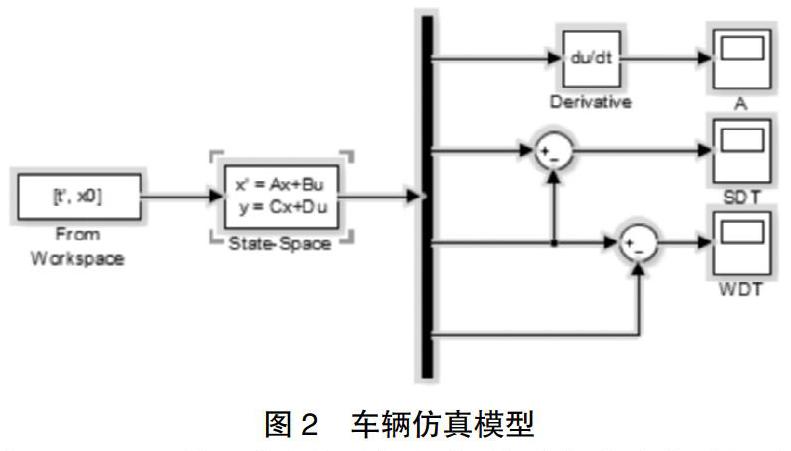
在Simulink环境下建立的最优主动悬架车辆仿真模型框图如图2所示。LQR主动悬架系统和被动悬架系统的时域仿真结果分别如图3、图4所示,包括路面位移输入、悬架动行程SDT(t)、轮胎动位移WDT(t)及车身加速度BA(t)。
图3、图4、图5为被动悬架仿真图。
4 结论
图中对主动悬架的仿真需要进一步探讨。只对被动悬架的车身加速度、悬架动行程、轮胎动位移进行仿真。关于主动悬架与被动悬架的优越性,据有关资料可知,主动悬架提高了平顺性、舒适性和操纵稳定性,应用前景广阔。
参考文献:
[1]兰波,喻凡,刘娇蛟.主动悬架LQG控制器设计[J].系统仿真学报,2003(15):138-140.
[2]余志生.汽车理论[M].北京:机械工业出版社,1999.
