车载雷达天线同步举升系统仿真研究
2020-10-12凌帅
凌帅
摘 要:车载雷达作为重要的军用设备,其自身的适用性和耐用性十分重要。由此,本文就以车载雷达天线同步举升系统仿真研究为题进行研究,希望对我国车载雷达的发展提供一定的帮助。
关键词:车载雷达;举升系统;交叉耦合控制
随着现代战争的升级和国防要求的提高,传统的雷达已经难以满足日益激烈的战争要求,具备高机动性和高作战性能的雷达才是现代战争中必备的利器。车载雷达本身的高机动性和不俗的跟踪识别能力,就可以满足现阶段军事和国防需求。
现阶段,我国的车载雷达已经达到了较高的技术水平,但是在天线举升系统上,还是存在一定的缺陷。其一就是同步控制这一难题的阻碍,另外就是装置本身的强度不足,容易发生形变等情况,这些都会影响到我国车载雷达的性能。
1 车载雷达天线同步举升系统的基本原理
1.1 车载雷达液压系统工作要求
军用车载雷达相对普通车载雷达在性能和耐用性上要严格不少,具体来说军用车载雷达需要满足以下要求。首先,车载雷达液压系统的需要满足每分钟14升的额定流量,所用的液压油最下不得低于NAS7级,液压油在工作过程中需低于80℃。其次,举升油缸的运动速度需要大于每秒1.5cm,满足10Mpa的额定工作压力,油缸的举升力还要大于15千牛。最后,车载雷达在进行驾撤动作的過程中,需要在3分钟内完成,驾撤的过程中还要保障过程的平稳和较小的误差。此外,由于车载雷达需要长期的野外作业,所以其本身还要具备良好的抗腐蚀性和防水、耐热等功能。
1.2 车载雷达液压系统组成及工作原理
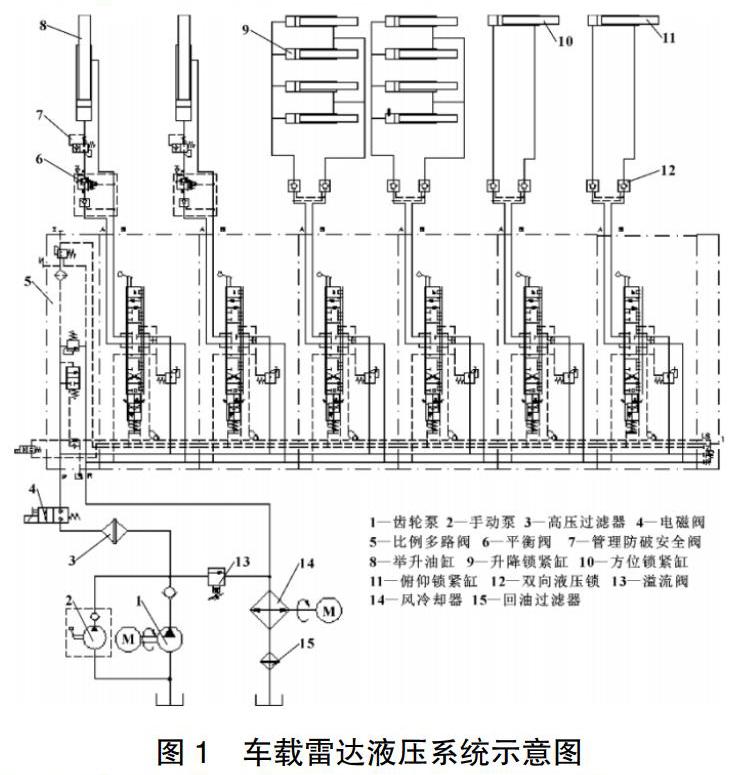
通过图1我们可以看到,车载雷达液压系统的组成主要是由液压泵组、液压缸、控制阀组等诸多部件组成的。其中液压泵组是由两个泵组成的,齿轮泵负责日常工作,手动泵起到紧急工作的作用。液压系统中液压缸采用了口径较大的缸体,能够为液压系统提供较大的举升力,并且在雷达天线架设完毕后,液压系统中的锁紧缸还会锁死,以保障雷达天线的工作平稳。最后,通过图片我们可以看到,该套系统中存在较多的控制阀,这些控制阀都可以实现独特的作用,例如平衡阀可以实现稳定雷达天线的下降情况;管路防破阀可以起到防止油管破裂的作用,减少事故发生的作用。
2 车载雷达天线同步举升系统分析
2.1 建立相关数学模型
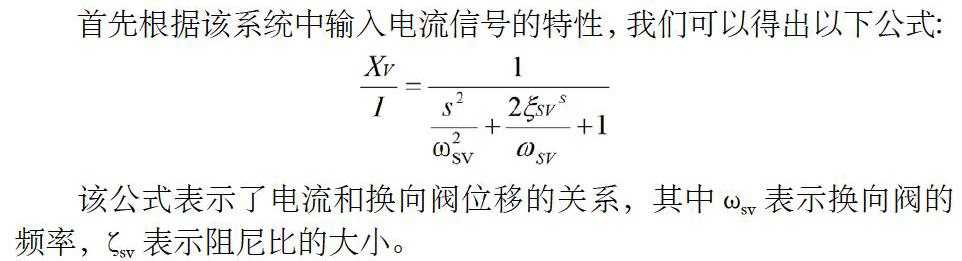
首先根据该系统中输入电流信号的特性,我们可以得出以下公式:
该公式表示了电流和换向阀位移的关系,其中ωsv表示换向阀的频率,ζsv表示阻尼比的大小。
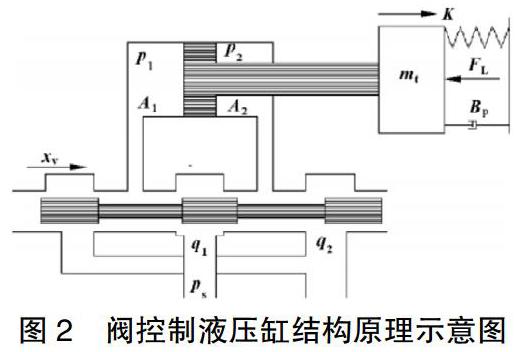
2.1.1 建立阀控非对称缸数学模型
首先我们已知液压系统比例阀的线性化流量方程为:
我们将比例阀的流量方程拉普拉斯变换后可以得到以下公式:
上述公式中,Kq表示为比例阀的流量增益,Kc则表示为比例阀的压力系数。此外,我们综合考虑了液压缸的工作过程,认识到有可能因为各种原因导致流量的不对等,故而对负载流量进行了定义,定义得到的公式为:
上述公式中q1、q2分别表示液压缸进油腔的流量,以及回油腔流出的流量。其中Ap表示为液压缸的活塞面积;xp表示活塞的位移;Cip和Cep分别表示缸内和缸外的泄漏系数;βe表示为弹性模量;V1和V2分别表示进油和回油的容积。
上述的两个公式,表示液压缸的容积公式,该公式中V01和V02分别代表进油腔和出油腔的原始容积。
通过上述公式我们可以得到下述的方程式:
上述方程为流量延续性方程,该方程中Ctp表示总泄漏的系数。通过对该方程的拉普拉斯变换,我们可以得到下述方程:
上述方程表示液压缸输出和负载力的平衡方程。该方程中mt表示活塞的总质量;Bp表示为粘性的阻尼系数;K表示为刚度系数;FL表示为负载力。通过对该公式的拉普拉斯变换,我们可以得到下述公式:
随后我们对上述该公式进行联合,可以得到液压缸的活塞杆产生的总输出位移:
上述公式中,ωh表示为液压的固有频率;ζh表示为液压的阻尼比系数。最终我们可以得到液压系统的开环传递函数为:
通过上述公式,我们可以将液压系统看做一个串联系统,该系统有一个积分环节和一个振荡环节组成,液压系统的阻尼也会因为工作位置的变化而出现相应的变动。
2.2 控制策略分析
通过上述公式分析和论证,我们可以看到,液压同步闭环控制系统可以有多种控制方式,包括同等控制、主从控制和耦合控制。每一种控制方式都有自身的特点,同等控制主要可以在液压系统的启动和停止阶段起到较好的作用;主从控制主要具有相较同等控制更好的精度,而耦合控制的精度则要更高于主从控制,所以,该系统选择交叉耦合控制。
3 车载雷达仿真运行及结果分析
3.1 建立仿真模型
本文建立仿真模型,主要是利用AMESim和Simulink这两款仿真模型工具建立,即利用AMESim建立二级液压举升油缸的模型,再利用Simulink建立控制部分的模型,随后对这两个进行联合仿真,以保障建立的模型更符合现实情况,数据更加精准。
系统中核心部件和其具体参数设置如下所示:每分钟1400转的恒压泵,排量为每转11毫升;压强为18的溢流阀;额定电流为40毫安的比例阀,比例阀的频率为80赫兹,阻尼系数为0.8;二级举升油缸一级和二级的活塞直径分别为11cm和8cm,活塞杆的直径分别为9.5cm和7cm,形成分别为8.7cm和9.1cm。该系统采用了交叉耦合的控制方式。
3.2 系统仿真模型的结果分析
具体的结果我们可以看图3和图4,其中图3是不存在偏差情况下的升油缸位移曲线图,其中升油缸两边的负载都是15千牛,最大的位移数值不超过的0.3cm,具有良好的同步性能。其中图4表示在有偏差情况下的工作情况,其中升油缸的两边一个15千牛一个18千牛,总的偏差值不超过0.5cm。综上所述,该系统可以满足使用和设计需求。
4 结语
综上所述,通过前文的论证和后续的分析,我们基本介绍了车载雷达的同步举升系统和液压系统,并根据模型和公式进行分析和探讨,通过分析我们可以导出,该数据模型可以起到良好的模拟效果,并且证明了交叉耦合控制系统具备较高的精准度和实用性,可以满足设计要求和实际需要。
