四卷筒式电差动卸船机凸轮限位保护机械结构逻辑运算器分析
2020-09-29蔡有高万吉祥李玉锋
蔡有高 万吉祥 李 祥 李 寒 李玉锋
(华能(福建)海港有限公司,福建 福州350602)
四卷筒桥式卸船机是世界上广泛应用的散料卸船机械之一,技术趋于成熟、可靠,在实际作业过程中,受外界因素影响较小,维修工作量小。在船舶行业逐渐向大型化方向发展,在运输能力上提出更高层次的要求。因此,相关人员利用行星差动结构传动特点,制造了一种纯机械的逻辑运算器,确保在任何运动状态下,实现运动保护,合理化地运用电气调速控制技术,提升卸船机操作性能。
1 关于差动形式卸船机分析
传统卸船机上的小车运行、抓斗升降、抓斗开闭需要三套传动系统,通过技术改造之后,转变为四卷筒桥式抓斗方式,通过使用行星差动减速器、四只卷筒、起升开闭电机等,可有效实现对差动形式的控制,简化结构、减轻重量。通过卸船机上的小车进行运动,衍生出更加新颖的四卷筒牵引方式。四卷筒机械形式差动卸船机的核心技术是行星差动减速器的运用,基于卸船机械船能力不断提升的前提下,行星差动减速器制造难度加大。基于此背景下,电差动形式的卸船机诞生,在非行星减速箱驱动支持下,形成的由四台电机组成的四个卷筒,运用电控方式,驱动每个电机带动相对应的减速器进行的卷筒运动,其工作原理类似于机械差动形式运动。四卷筒机电差动卸船机上,小车通过独立运动,对电机进行驱动,通过将差动减速箱上安装凸轮限位装置,实时进行检测和保护,与小车运行互不干扰[1]。相关研究人员,通过参考机械差动卸船机起升、抓斗、开闭动作的保护,为实现小车独立运动,安装了凸轮限位保护装置,加强对指令信号的保护,从而监测卸船机起升、开闭动作是否处于安全状态下。
2 四卷筒差动小车牵引机构工作原理及电差动四卷筒驱动机构
2.1 工作原理
四卷筒差动小车牵引机构由四个卷筒组成,两个为起升卷筒、两个为开闭卷筒,通过将起升钢丝绳与前开闭钢丝绳绕出卷筒,经过塔架滑轮等装置连接到抓斗;后起升钢丝与后开闭钢丝同样从卷筒绕出,经过后大梁改向滑轮连接抓斗的开闭段,确保最终实现对小车的驱动。具体的结构(如图1 所示),四卷筒电差动卸船机在具体运行过程中,利用小车和四卷筒实现抓斗的起升和开闭,整个运动过程简单,钢丝绳用量和滑轮数量少,在抓斗和钢丝绳更换上更加便捷,一定程度上减轻了小车移动荷载。相关人员在具体设计四卷筒小车牵引机构过程中,需要科学计算电机功率。小车在运动过程中,涉及到阻力限制,包括摩擦阻力L11、风载荷L12、起升绳僵性以及滑轮的摩擦阻力L13、坡道载荷L14、加速载荷L15等,在具体的计算方式,以实例进行分析,比如一台10×105kg/h 卸船机来说,已知的前提条件为小车运行质量(T)2000kg、额定的载荷(L)为9000kg、抓斗和起升质量(T)为8200kg、小车的运行速度(V)为200m/min,载荷加速时间(t1)为6s、机构效率(u)为0.95、电机过载因素(P0)为4[2]。因此,根据已知条件进行计算,可得出小车的摩擦阻力,根据风压可计算出风载荷因数,进而确定小车最终的运行功率。
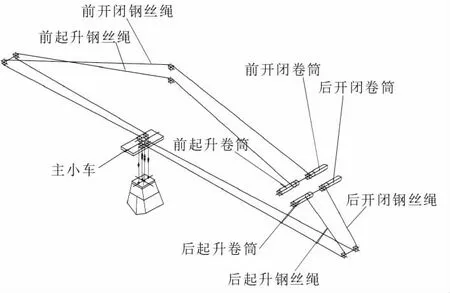
图1 四卷筒差动小车牵引机构图
2.2 电差动四卷筒驱动机构
基于电差动四卷筒驱动机构,性能优势显著,逐渐代替了传统的差动减速器,为具体的项目运行,有效控制了成本,通常情况下,电差动卸船机的起升、开闭机构由电动机作为驱动,在减速器限位输出轴位置安装1:1 的分动箱,并安装绝对值编码器和凸轮限位,进而实现电气系统对卷筒转速和圈数信息的控制。
2.3 卸船差动减速器结构
当出入轴转速确定后,再次输出轴的转数为自由度减速器,具体特征表现为箱体上存在三根轴,待输入的轴转速确定后,会出现两个自由度减速器,称之为差动减速器,可按照要求控制运动形式,实现运动分解和合成。差动减速器的主要构成为齿轴、齿轮、太阳轮、行星轮、箱体等,容易散热和润滑,在具体的工况中,易装配、易拆卸,可有效提升设备的运行质量[3]。当小车在电机在运转过程中,通过输入小车的转速,可有效带动行星轮的运转,对输入轴进行固定,提升电差动卸船机稳定运行效果。
3 电差动卸船机凸轮限位保护机械结构逻辑运算器
3.1 差动减速器凸轮限位检测装置
电差动减速器电气程序,实现对机械差动卸船机的起升、开闭机构控制,加强对卸船机上小车机械结构的保护。相关研究人员,在具体试验过程中,加强对电差动卸船机凸轮限位的保护测试,将凸轮限位系统以海陆侧卷输出方式,作为系统的输入值,通过差动行星减速器实现对机械逻辑的运算,最终实现凸轮限位与减速器输出轴的连接,并在电差动卸船机凸轮限位保护过程中,有效控制运转速度和运转方向,更好监测和保护海陆侧卷筒的起升保护。相关研究人员为提升电差动卸船机差动监测功能,积极设计和研发链轮差动减速器凸轮限位检测装置,并以链条形式,控制卷筒旋转圈数和旋转的方向,通过在差动减速器上配套安装凸轮限位和绝对位置编码器,可精确计算出圈数的变化,并实时将绝对编码器采集到的信息数据传递给电气控制系统,实现对设备硬件的保护。
3.2 行星差动传动原理
相关研究人员研发的一种电差动卸船机为保护机械结构逻辑运算器,确保实现对限位系统输入信号的保护,实时控制卸船机的抓斗起升、开闭动作的变量值。基于逻辑运算器本身是一种机械结构,通过在卷筒中输入卷筒的不同运动方式,实现对凸轮限位系统的输入。电差动卸船机在具体运行过程中,需要在行星减速器的控制下,实现对机械机构的保护。就行星差动传动原理来看,行星传动装置是由一系列的齿轮构成的,在各个齿轮周转过程中,存在两种不同的运行方式,一是行星齿轮轮系,二是行星差动轮系。相关研究人员在实践研究中发现,行星差动具备两个独立运动的主动构件,确保实现系统的正常运动。行星差动传动是行星齿轮传动的特殊形式,在具体运动和功率传输过程中,行星差动传动需要按照一定的要求对输入的功率和主动运动进行分解传递。在具体工况下,通过、行星差动传动,可有效解决调速和驱动问题。
3.3 机械结构逻辑云计算器
相关研究人员,通过实践分析发现,从一个基本构件输入运动,行星差动轮系可分解成两个构件运动和输出的方式,基于此,相关研究人员设计和制造出具有差动功能的齿轮箱,确保更加灵活地控制卸船机的起升、开闭运动,充分发挥出机械结构逻辑运算器的功能。卸船机核心工作机构是起升、开闭和小型牵引机构,主要控制了抓斗的起升、开闭和小车运行状态,常规的四卷筒桥式卸船机(如图2 所示),小车牵引机构采用四卷筒结构形式实现差动功能的运用,具体(如图3 所示),两台行星差动减速机,通过控制电气系统,实现抓斗起升/开闭及小车运动,通过齿轮之间的联动,更好高效、可靠地应用在实际的工作场景中。
3.4 电差动机构传动方案

图2 桥式卸船机
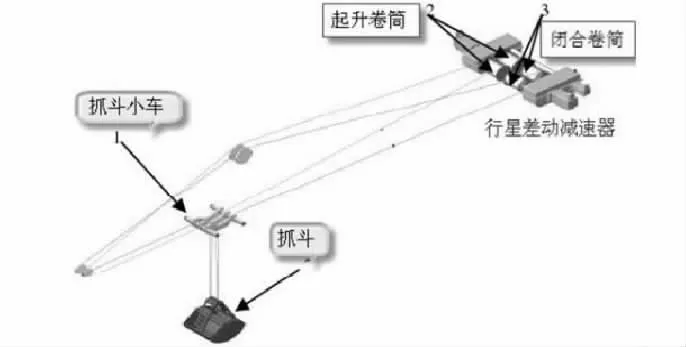
图3 小车牵引差动机构缠绕
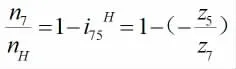
齿轮在传动系统中,传动效率高、结构紧凑、传动比较大等优势作用,在功率分流作用下,可减轻单个齿轮的受力,降低了齿轮件的啮合力,在差动机构中,会在没和减速箱中配备两个功能包,进而实现减速功能,并在每个功能包中配备一个行星轮系,促进减速机和齿轮之间的啮合,更好完成物料抓斗,当卸船机抓斗在起升、关闭时,通过、太阳轮完成内齿圈的制动;在小车运行过程中,通过齿圈输入实现太阳轮的制动,在开闭机运行期间,小车电机不开启,则小车不会运行,开启电机,则小车开始运行,可将开闭电机转速设定为n 开,前提条件为n开=n9,将开闭卷筒转速设定为N开闭,已知条件为nH=N开闭, 转速单位为r/min,将齿轮的齿数设定为Zi,通过运算则得到太阳轮7 与行星架H 的传动比设定为:
4 结论
综上所述,通过分析电差动减速器凸轮限位检测装置、行星差动传动原理、机械结构逻辑云计算器、电差动机构传动方案等方面,相关研究人员,设计、制造出可以应用于四卷筒机械形式的差动卸船机,为行星差动应用,提供了可靠的机械保障,为电差动形式的卸船机应用提供了技术支撑。因此,相关研究人员,需要进一步加强对四卷筒桥式电差动卸船机的研究和探讨。
