基于树莓派的智能居家机器人系统设计
2020-09-26詹宇娴陈耿凌活龙刘常烨许树杰丁凡陈景华
詹宇娴 陈耿 凌活龙 刘常烨 许树杰 丁凡 陈景华

摘要:该文阐述了以树莓派作为主机,以室内远场语音识别和室内自主定位导航为技术核心,针对需陪护的居家人士的智能居家机器人设计方案。通过物联网、OpenCV机器视觉、机器学习等技术,拓展家电控制、健康检测、家人通信等陪护功能。
关键词:智能陪护;语音增强;激光雷达;自主定位导航;树莓派
中图分类号:TP18 文献标识码:A
文章编号:1009-3044(2020)24-0193-02
1 引言
近年来愈来愈多智能家电产品涌进了千万家庭,从智能电视、智能冰箱、智能空调、智能灯控系统,到智能插座、智能门窗,再到扫地机器人、智能音箱等等,在带来便利的同时,也为老人、病人等弱势群体增加了知识负担。为了让智能产品更好地服务于老人、病人等居家群体,同时让老人、病人更便捷地融入这个互联网的信息时代,本文设计了一个以简单语音交互为操作方式的智能机器人系统,以机器人作为家庭智能中枢控制众多家电,同时集成视频通讯、健康检测、备忘提醒等多种功能。
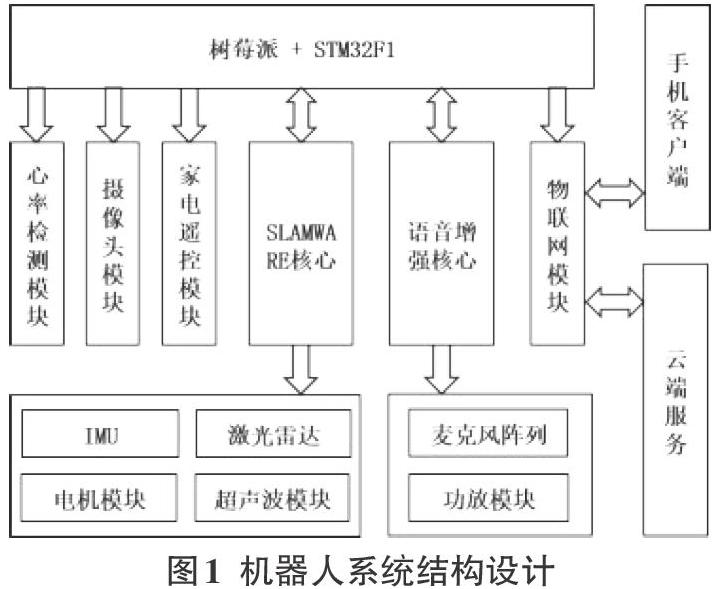
2 机器人系统结构设计
机器人系统以树莓派作为主机,用STM32芯片拓展串口连接各个模块,主要的模组由专门的处理核心完成数据处理并与树莓派交互。由语音增强芯片配合麦克风阵列板完成语音识别的前端处理,仅将编码过后的音频信息交予树莓派处理,树莓派通过连接云端服务完成语音识别的后端处理。自主定位导航模组由激光雷达、超声波模块、直流减速电机组和SLAMWARE核心板组成,由SLAMWARE核心完成机器人的定位、建图、路径规划、运动控制等功能。此外,再拓展摄像头模块、遥控模块、心率检测模块等完成更多的功能。
2 系统软件设计
机器人软件系统的运行载体包括树莓派、语音增强核心、自主定位导航核心、云端服务器、手机客户端五大板块。主要涉及语音交互和基于SLAM框架的自主定位导航两个核心的程序设计,并拓展其他人性化的功能,如:显示屏交互设计,家电控制,健康检测与统计报告,自适应任务、老人社交平台建立等。
2.1 语音交互
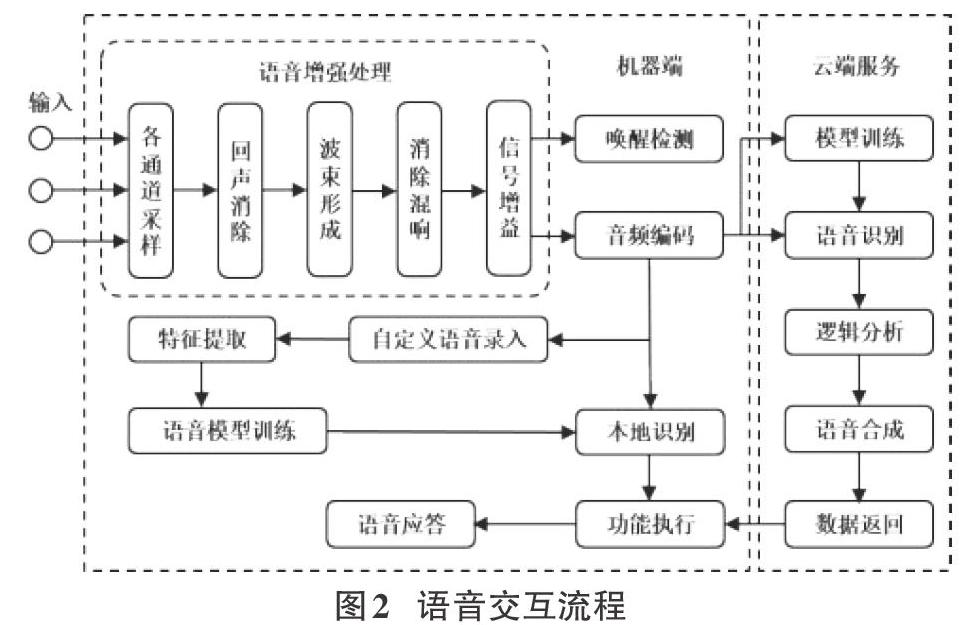
语音交互的流程包括语音识别ASR、自然语言理解NLU、对话管理DM、自然语言生成NLG和语音合成TTS,其中语音识别的准确率尤为关键。语音识别又包括了机器前端的语音采样、语音激活检测、特征提取,后端的语音模型构建、语音解码。在面对室内包含各种噪声、混响、回声、不相关人声等复杂的环境下,前端的语音采样处理对提高语音识别的鲁棒性十分重要。通过语音增强模块先运用自适应回声消除(AEC)算法[1]对环形麦克风各个通道的信号进行回波消除,然后根据时延估计算法[2]进行声源定位,进而通过自适应波束形成算法形成拾音波束,并抑制其他方向的信号,再通过后置滤波算法[3]消除混响等噪声,最后对语音信号进行增益输出,这一系列操作完成语音信号的前端。对前端处理过的语音信号进行特征提取、唤醒词检测等判断语音的有效性,再对语音信号进行编码。树莓派通过接入云端语音交互Restful API上传音频编码,在云端通过语音模型匹配完成语音识别,并通过云端的自然语言处理NLP进行逻辑分析以执行相应功能。
但是在面对部分群体不会说普通话、语速缓慢或吐词不清等情况,传统的语音模型识别的准确率很低。若建立针对性地语音模型,需要大量的数据进行模型训练,且面对多种情况,训练模型的难度和成本都很大。因此本设计采用了较为简单的语音音频相似度对比的方法构建语音模型,通过手机客户端App录入语音和相应功能完成常用语音的识别,把针对性模型训练的工作交给年轻用户。同时通过对语音进行声学特征比对,进行联想性的语音识别,降低语速和吐词不清带来的影响。
2.2 自主定位导航
机器人的室内自主定位导航[4]主要包括定位与地图构建(SLAM)、路径规划和运动控制与实时避障三个部分。其中SLAM[5]又包括预处理、匹配、地图融合三个核心步骤,即通过激光雷达实时不断地获得数据,对数据进行滤波优化完成数据预处理,再通过点云匹配算法[6]将局部环境的点云数据匹配并拼接到上一次的点云数据,经过在室内不断的移动和雷达扫描形成地图。在经过新一轮的环境扫描时,把新的数据匹配拼接到先前的地图中,不断进行融合更新。根据要执行的功能通过D*算法[7]进行路径规划,控制电机运行,并在行进过程中通过超声波模块、防跌落模块检测障碍实时避障。
2.3 手机客户端App设计
手机客户端主要服务于监护人,便于其通过手机对机器人系统进行配置和远程查看需陪护的居家人士的健康状况,形成立体化的陪护系统。可以通过手机客户端录入自定义语音,进行语音模型训练,配置家电的遥控参数,根据时间、环境温度设置特定任务时间。还可以在手机上查看其健康状态报告,远程监看家里的情况。
3 结语
本文设计的机器人系统通过本地简单语音模型与完善的在线语音识别方案结合,提高现有语音模型对老人、病人的适应性,这种方案简单、成本低,可以满足人们对智能产品简便实用的需求。为居家人士创造出一个安全,便捷,安逸休闲的智能化居家环境。相信随着人工智能在各个领域的技术发展和完善,语音交互的适应性会更强,机器人系统也能够通过用户状态、周围环境提供更加智能的服务。现下社会正在加速进入人工智能的时代,本设计可以更好地带领所有人群包括老人病人等弱势群体无障碍地融入人工智能时代,为生活增添光彩。
参考文献:
[1] 冯江浩.基于自适应滤波的声学回声消除算法研究[D].太原:太原理工大学,2018.
[2] 宗志亚.基于麦克风阵列的室内声源定位方法研究[D].重庆:重庆大学,2012.
[3] 夏杰.麦克风阵列自适应波束形成及后置滤波技术研究[D].重庆:重庆邮电大学,2017.
[4] 郑灿涛.基于激光雷达的室内移动机器人自主导航与行人跟踪研究[D].广州:华南理工大学,2018.
[5] 李想.基于SLAM的室内移动机器人导航技术研究[D].哈尔滨:哈尔滨工业大学,2018.
[6] 李亮.基于点云匹配的智能车定位方法研究[D].上海:上海交通大學,2018.
[7] 张希闻,肖本贤.改进D~*算法的移动机器人路径规划[J].传感器与微系统,2018,37(12):52-54,58.
【通联编辑:唐一东】
