面向卫星装配的六自由度机械臂运动学分析及仿真
2020-09-25高涵
高 涵
(天津大学仁爱学院,天津 301636)
0 引言
目前,卫星装配主要采用专用的工装用于定位、支撑各个部件,然后通过人工辅助进行对接装配。然而,人工辅助工装存在生产效率低、关键对接部位可视性不强等问题,亟需一批具有快速、高精度、高可靠性的自动化装备来满足发展的需求。六自由度机械臂作为自动化装备的典型代表,由于具有可靠性高、灵活性强、冗余性好等特点,在焊接、搬运、装配及水下等领域得到了广泛的应用[1-5]。
六自由度机械臂运动学分析是末端位姿精确控制的基础。与正运动学问题相比,逆运动学求解较为复杂,其复杂程度与机械臂构型有关,且对于不同的机械臂构型没有通用的解法。六自由度机械臂逆运动学求解方法主要包括解析法、迭代法及几何法,国内外研究学者对此展开了研究。姜宏超等[6]采用解析法求解出六自由度模块化机械臂全部逆解,虽然该方法可以求解出全部解,但求解较为复杂,计算量较大;Perez等[7]采用代数法求解七自由度机械臂逆运动学,但该方法不能保证得到有效的封闭解;李宪华等[8]根据六自由度机械臂特殊结构,采用几何方法和解析法结合得到机械臂逆运动学完整解析解,该方法主要依赖于机械臂的特殊构型,通过几何关系进行求解,但需要与解析法结合使用,完成逆运动学求解工作;Nearchou[9]基于遗传算法对逆运动学问题进行了求解,但该算法的局限性在于逆运动学求解结果的收敛性依赖于初始点的选取。
针对以上问题,本文以课题组研制的六自由度机械臂为研究对象,提出一种基于牛顿迭代的逆运动学求解方法,并通过MATLAB GUI构建仿真平台,验证正运动学模型及逆运动学求解的可行性和准确性。
1 面向卫星装配的六自由度机械臂正运动学分析
1.1 机械臂结构建模
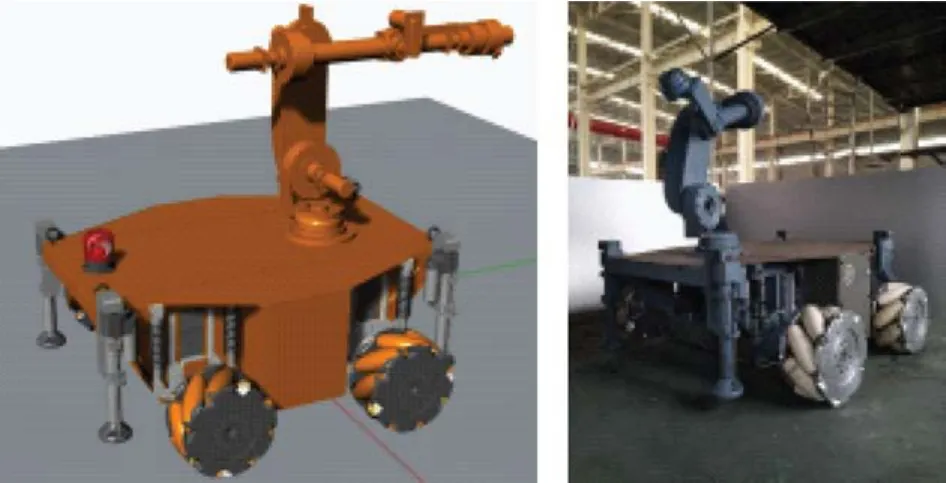
图1 六自由度机械臂三维及结构图
本文以课题组研制的六自由度机械臂作为研究对象,其三维模型及结构如图1所示。该机械臂由基座、肩部、肘部、手腕1、手腕2及手腕3组成,其中关节1~关节3决定了机械臂的末端位置;关节4~关节6确定了机械臂的末端姿态。为了描述机械臂关节变量与末端位姿之间的函数关系,采用Denavit-Hartenberg(D-H)建模方法构建机械臂连杆坐标系,如图2所示;根据图2中的结构建立D-H模型,如表1所示。

图2 六自由度机械臂的连杆坐标系
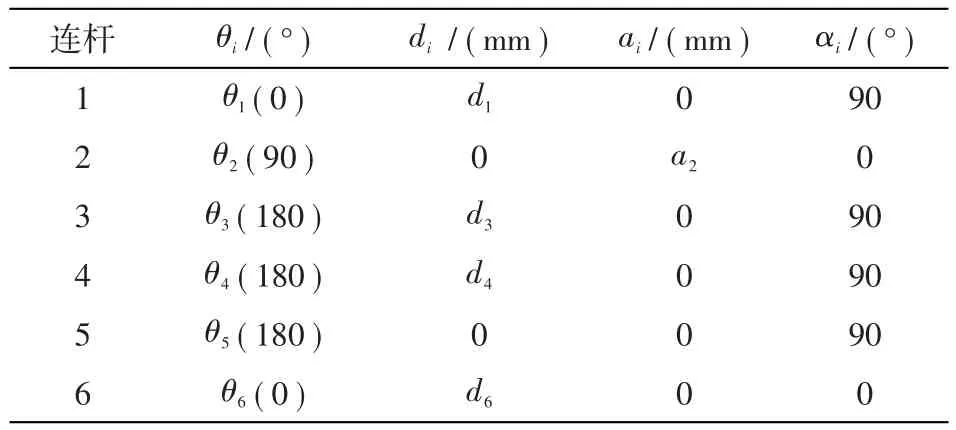
表1 六自由度机械臂连杆参数表
1.2 正运动学分析
相邻两连杆坐标间的齐次变换矩阵,可由公式表示为:

根据表1和式(1)即可求得机械臂末端相对于基坐标系的变换矩阵:

2 面向卫星装配的六自由度机械臂逆运动学分析
由于解析法求解机械臂逆运动学计算复杂,故本文采用数值迭代法对六自由度机械臂逆运动学问题进行求解。设六自由度机械臂末端坐标系相对于基坐标系每一次迭代后得到的齐次变换矩阵为:

将式(2)和式(3)两个齐次变换矩阵对应元素相减组成非线性方程组,由公式表示为:

将式(4)齐次变换矩阵中的12个元素分别对关节角度θi(i=1,2,3,…,6)求偏导,得到此方程组的雅可比矩阵为:

由于关节空间速度与操作空间速度存在如下关系:

式中:q˙为关节空间的广义速度;x˙为机械臂末端执行器在操作空间的广义速度;J为六自由度机械臂雅可比矩阵。
当时间间隔足够短时,式(6)可改写为:

根据式(5)~(7)即可对六自由度机械臂逆运动学进行求解,由于J(θt)为12×6阶矩阵,且该矩阵为非方阵矩阵,只能对其求伪逆矩阵,每一次迭代求得的关节角度可由下式表示:

式中:θt、θt+1分别为第t次和第t+1次迭代求得的关节角度值。
基于数值迭代法求解六自由度机械臂逆运动学流程如图3所示。首先根据初始关节角度值求解雅可比矩阵,得到下一次迭代的关节角度值;然后计算‖‖F(θ)2并判别‖‖F(θ)2是否不大于0.000 1,若满足条件,则输出期望位姿对应的关节角度值,否则继续迭代,直至满足条件为止。

图3 数值迭代法逆运动学求解流程图
3 六自由度机械臂运动学仿真验证
3.1 正运动学仿真验证
在Solidworks软件中构建基坐标系,并按照该坐标系绘制六自由度机械臂三维模型,如图4所示。此时机械臂各关节角度分别为0°、90°、180°、180°、180°、0°,选中末端零件的圆心,得到当前末端相对于基坐标系的坐标为(-775,23,806)mm,采用MATLAB编写六自由度机械臂正运动学程序,并将初始关节角度代入其中,得到末端相对于基坐标系的变换矩阵为:。结果表明,求得的末端位置与绘图软件中得到的位置坐标一致,故构建的正运动学模型正确。

图4 六自由度机械臂三维模型

图5 逆运动学求解关节角度
3.2 逆运动学仿真验证
为验证数值迭代法求解机械臂逆运动学的有效性和可行性,采用MATLAB软件编写机械臂逆运动学程序,仿真中使机械臂末端沿直线运动。机械臂从(-245.821 9,210.948 5,866.207 9)mm运动到(30.6,430.3,1 000.9)mm,总运动时间为5 s,时间间隔为0.1 s,机械臂逆运动学求得的关节角度、对应的末端位置及直线运动曲线如图5~7所示。从图中可以看出,数值迭代法求得的关节角度连续,且不存在突变,仿真求得的关节角度对应的末端执行器位置与期望运动的位置一致,故基于数值迭代法求解六自由度机械臂逆运动学的方法是可行有效的,且机械臂末端能准确地跟踪期望轨迹运动。

图6 逆解对应的机械臂末端位置

图7 六自由度机械臂直线运动曲线
3.3 仿真界面
为便于观测求解结果情况,采用MATLAB GUI搭建了仿真平台,如图8所示,该仿真平台可实现机械臂的正逆运动学求解,同时也可对直线和圆弧运动轨迹进行规划。通过触发课题研制的六自由度机械臂D-H参数、正逆运动学求解、逆运动学求解、直线运动及圆弧运动按钮,可将机械臂D-H参数表、正逆运动学结果、机械臂运动曲线及关节角度曲线显示于仿真界面中。
4 结束语

图8 六自由度机械臂仿真平台
以课题组研制的六自由度机械臂作为研究对象,针对解析法求解逆运动学计算量大、求解复杂的问题,提出了一种基于数值迭代的方法对六自由度机械臂逆运动学进行求解,通过每次迭代,使迭代矩阵逐渐逼近于期望位姿矩阵,并基于MATLAB GUI建立了仿真平台,仿真结果验证了本文所述方法的可行性和准确性。该方法也适合于其他构型的六自由度机械臂逆运动学求解,后续课题组将在此基础上对卫星装配机器人轨迹规划问题展开更为深入地研究,以实现卫星装配过程中的高效作业规划。
