多源信息融合的旋翼无人机定点系统设计
2020-09-18尹鹏飞苏宁波付梓轩
尹鹏飞,苏宁波,郭 达,付梓轩
(天津中德应用技术大学 航空航天学院,天津 300352)
0 引言
多旋翼无人机作为空中机器人的一种研究与应用平台近年来持续受到关注,而旋翼无人机系统则被广泛应用于军用、民用领域。定点悬停是无人机自主飞行控制与应用研究的基础,在执行航线飞行与测绘等作业任务时,通常依托GPS、BD结合IMU 形成广域定位系统进行位置测算[1-2]。而对于固定或移动目标点跟踪与着陆时,通常采用视觉传感器进行位置估计与定位[3-4]。相较于相对成熟的基于GPS定位系统的基于视觉方式的目标点定位通常面临多点光源照射不均、桨旋产生光影扰动、获取图像随本体振动等问题,常常带来定位参考点匹配困扰[5-6],造成无人机系统在期望定位点处沿3个轴向振荡漂移。
针对无人机定点环节的位姿信息处理,研究者们提出了一系列的算法。张承岫等[7]以经典互补滤波为基础,提出了一种可自适应补偿系数的互补滤波算法,完成了相对准确的姿态信息解算。陈孟元等[8]将传统卡尔曼滤波和互补滤波算法进行比较,提出了一种改进型的互补滤波算法,结果显示,数据平滑能力更强,收敛速度更快,有效地实现了飞行器姿态数据的融合,提高了飞行器的姿态估计精度。
本研究以球心半径20cm作为定点悬停目标点域,研究了基于互补滤波的高度信息融合和基于迭代法动态阈值计算确定平面中心点[9-11],对姿态与高度信息进行了串级PID控制[12],给出了系列实验结果。
1 硬件系统设计
基于视觉定位的多旋翼无人机系统采用了通行的模块化设计架构,综合考量了机载机电系统的特征尺寸、处理速度、能源配给、有效载荷等因素,进行了组件选型、整机装调及飞行性能测试。定型系统主要包括四旋翼机体结构、动力系统、供电系统、视觉采集系统、高度采集系统、飞控系统和通信系统。
A.多旋翼机体结构:根据所设计的无人机任务载荷,估算最大起飞重量约为2.3 kg,采用X型机体结构,轴距根据动力系统所选桨叶尺寸采用450机架。B.动力系统:依据无刷电机的拉力及效率,确定采用22 161 250 KV的无刷电机与PEC-9045桨。根据电机需要的最大电流,确定使用30 A电子调速器。C.供电系统:采用双源供电模式,动力供电与其他电子设备分别由不同的电池供给,以保证控制信号的稳定性。根据电机功率及任务续航要求,计算得出了动力电池采用3S 2 600 mAh,视觉采集系统等其他电子设备电池采用3S 1 300 mAh。D.视觉采集系统:基于TSL1401线阵CCD的图像采集模块获取地面标识图像信息,采用OpenMV3 CamM7 r 2嵌入式图像处理模块对定点标志物进行识别和信息处理,为多旋翼无人机提供精确的位置信息。E.高度采集系统:采用US-100超声波测距模块,可以对范围2~450 cm的区域进行有效探测,依据ms 5611气压计测量数据可有效分辨飞行所需任务高度。MPU 6050加速度计除提供姿态解算所需信息外,也提供轴向数据用于融合判定高度。F.飞控系统:采用STM32F407芯片作为主控芯片,通过UART串口读取各传感器模块数据,同时通过位置导航解算与姿态解算模块,输出各通道所需的PWM信号至电调电机。G.通信系统:采用开源飞控的无线数传模块NRF24L01实现PC端和机载飞控及视觉采集模块的无线通信,便于调试和数据观测。
2 软件系统设计
多旋翼无人机定位系统及解算控制关系如图2所示,主要包括4部分:高度信息滤波与融合、目标位置信息检测、位置与高度导航、无人机姿态与油门解算。首先由高度信息滤波与融合模块分别将超声波和气压计采集得到的高度数据与加速度计获取数据进行互补融合滤波,同时线性CCD采集像素信息,通过动态阈值计算及灰度门限法提取出中心点,得到无人机与中心点之间的偏差,输出至位置与高度导航模块。将PID计算的期望姿态与高度信息输入姿态及油门解算模块,通过串级PID控制器,解算出4个电机PWM信号,输出相应的电机。

图1 解算与控制关系框图Fig.1 Diagram of calculation and control
2.1 基于互补滤波的高度信息融合

图2 高度波形Fig.2 Height waveform
多旋翼无人机的飞行高度可通过加速度计测得的Z轴加速度进行二次积分获得,如图2a所示。数据的高频特性较好,能良好地跟随飞行高度的变化,但随着时间的积累会产生1个静态积分误差,且误差随着时间的积累逐步增大。通过气压计和超声波可以测量获取高度信息,从图2b可以看出。由气压计所测量的高度数据会在真实的飞行高度附近浮动,存在着1个高频噪声。从图2c可以看出,超声波所测量的高度数据,在0~2 m范围内相对准确度更高,两者的低频特性整体良好,但在实际高度附近均存在高频振动。
将Z轴向加速度积分处理后与通过气压计和超声波获取的高度信息进行互补滤波,通过低通滤波去除气压计与超声波测量值的高频振动干扰,通过高通滤波去除加速度计积分带来的累积误差,以速度互补滤波为例,模型如图3所示。

图3 互补滤波模型Fig.3 Complementary filtering model
根据加速度计、气压计与超声波的检测数据不同,对速度与高度进行了两次互补滤波处理,同时鉴于气压计在低高度区间精度较低,超声波在低高度区间时精度相对较高的特点,对两组互补滤波后的数据进行了加权融合,高度信息滤波与融合模块的系统框图如图4所示。
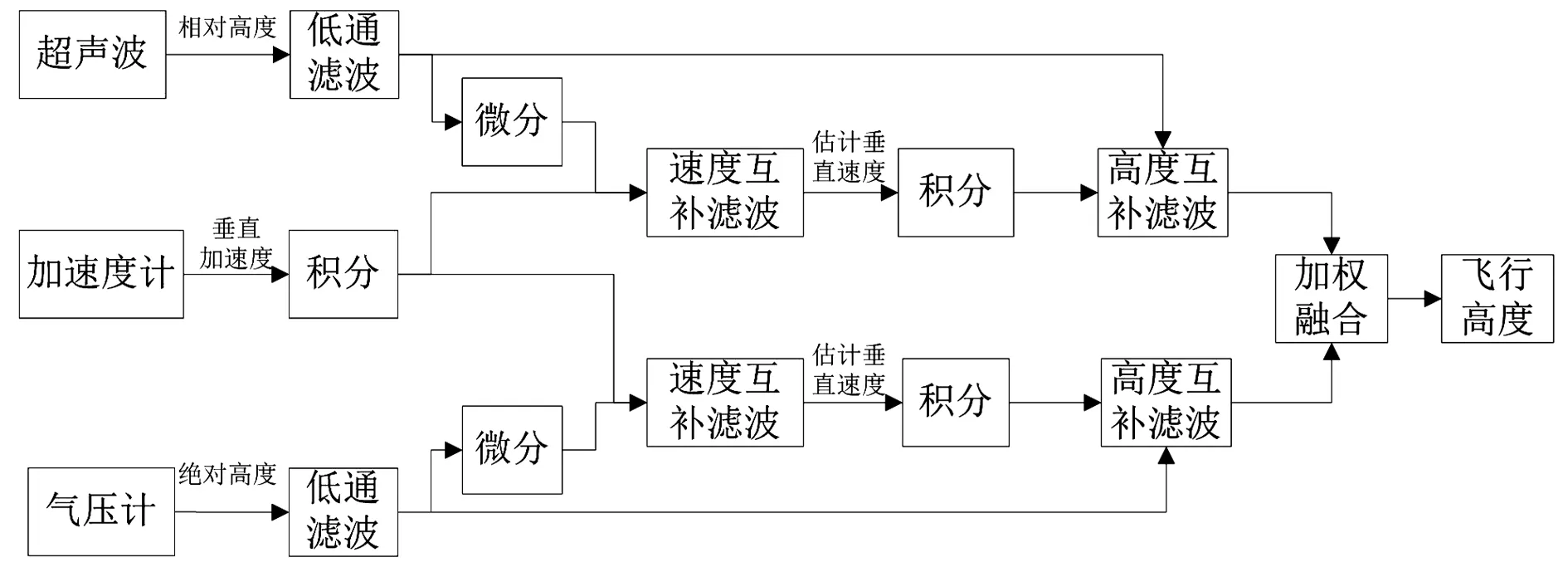
图4 数据融合关系框图Fig.4 Data fusion relation diagram
2.2 基于全局阈值的迭代阈值计算
飞行过程中获取的视觉信息因受设备振动、光照变化、桨旋扰动影响,导致对参考点模型的识别成功率通常较低。利用迭代算法获取标志点分割的自适应阈值,步骤如下:
(1)无人机起飞前在起始位置获取静态图像,图像尺寸与位置固定,根据双峰值均值算法,确定阈值初始值T(K)。
(2)依据阈值T(K)将图像分为目标和背景,灰度等级大于等于T(K)的像素点组成认定为目标,灰度等级小于T(K)的像素点组成认定为背景。
(3)分别计算目标和背景区域内像素的灰度平均值u0(K)和uB(K)。
(4)计算更新阈值
(1)
(5)当T(K+1)-T(K)<δ时,其中δ为精度,则结束搜索,将T(K)作为所求的阈值,否则更新阈值为T(K+1)并转至步骤(2)继续迭代处理。
2.3 确定中心点位置
根据动态阈值计算模块得出该循环周期最佳阈值T(K),将灰度图像中大于T(K)的像素点位置位置Pij坐标求平均,即可确定目标中心点位置,计算如下:
(2)
(3)
其中,imax,jmax分别为目标像素点Pij的二维数组长度;xPij,yPij为各目标像素点的横纵坐标;X,Y为最终计算出中心点Pij的坐标。
2.4 基于串级PID的姿态和高度解算设计
飞控的姿态与高度解算采用串级PID控制方式。以姿态控制为例,串级PID控制系统由两个串连起来的PID调节器组成,分别为姿态角度控制环与角速度控制环,即响应速度快的姿态角速度控制放在内环,响应速度慢的姿态角度控制放在外环。先给定俯仰角的参考值ΦP,然后经外环PID控制算法计算后得到俯仰角速度的参考值ΦP,再经内环PID控制算法计算后可以得俯仰控制系统的输入值,提供给电机转速控制器。相比单级的PID控制,串级PID控制响应更为明显,系统工作效率相对较高,能够更为稳定地对姿态变化进行控制。
3 实验验证与分析
实验场区设置在学校的实训中心飞行实验区,如图5所示,地面布设KT板,并标记了半径10 cm的中心点域。通过3组实验对以下3项关键内容进行了验证:
(1)通过不同高度连续飞行实验,验证互补滤波算法对高度数据融合的效果,证明其有效性。
(2)通过强弱光条件对比实验,验证基于全局阈值的迭代阈值计算对环境的适用性。
(3)通过定点悬停实验,验证定位系统在水平轴向和垂直轴向对机体控制的稳定性。
3.1 不同高度连续飞行实验
在实验场区进行了不同高度连续飞行实验,飞行高度主要集中在20~160 cm。从图6可以看出,互补滤波所得到的飞行高度数据,具有加速度计、气压计与超声波三者所得高度各自的优点,平均误差0.18 cm,能较为准确地反映出无人机的实际高度信息,最大误差仅0.56 cm,主要出现在加速度值急剧变化的附近,对目标任务整体影响极为有限。

图6 互补滤波融合处理后的高度波形Fig.6 Height waveform after complementary filtering and fusion
3.2 不同光强下阈值自适应实验
为比较在不同光强下阈值对目标中心点域(前景)与点域外场区(背景)的分割效果。在背景灰度均值100和30两种情况下,对前景、背景灰度值及动态阈值的变化进行了实时记录。由图7a、b可以看出,两种条件下动态阈值全部处于目标中心点域灰度值和点域外场区灰度值之间,整体区分效果良好,对两者均能够进行有效分割,从而达到了对定位目标点的辨识。在弱光条件下,动态阈值有部分离散采样数据向背景偏移,但在单次采样对比时均未发生混杂,未对目标辨识产生实质影响。
3.3 定点悬停实验
在实验场区进行了定点悬停实验,高度设定800 cm,从图8a中可以看出,飞行器能够稳定控制在目标高度线上下,平均误差不超过2 cm,最大误差5.4 cm。与此同时,从图8b中可以看出,在水平轴向上,飞行器能够被控制在目标中心点半径20 cm圆域内,表现出了良好的定点悬停特性。

图7 强弱光条件下动态阈值变化曲线Fig.7 Dynamic threshold curve under strong and weak light condition

图8 定点悬停实验水平与垂直轴向数据变化Fig.8 Horizontal and vertical axial data changes in fixed-point hovering experiment
4 结论
针对旋翼无人机定点悬停中存在的视觉模型匹配易受外界环境因素影响、高度噪声复杂等问题,采用基于迭代算法的自适应阈值的图像分割算法与互补滤波高度信息噪声处理,设计了串级PID定点控制器,得到以下结论。
(1)对加速度计、气压计、超声波等多源数据进行了互补滤波与融合处理,实现低通滤波消除高频振动干扰,同时高通滤波对于去除累积误差具有明显效果。
(2)通过迭代算法计算动态阈值,解决了不同光照条件下视觉模型匹配的问题,能够有效分割图像边界。
(3)基于串级PID实现了姿态与油门的解算,形成了多源信息融合的多旋翼无人机室内定位系统,开展了不同高度连续飞行、不同光强下阈值自适应以及定点悬停系列实验,充分验证了系统的有效性。
