田间管理机路径跟踪系统设计及试验
2020-09-17黄腾达蒋蘋胡文武肖菲菲吴帆刘展名
黄腾达,蒋蘋,胡文武,肖菲菲,吴帆,刘展名
(湖南农业大学机电工程学院,长沙410128)
农业机械导航技术有效地减轻了劳动强度,提高了生产效率,是精准农业体系中的重要组成部分[1-3]。自动转向是实现农机导航驾驶的关键技术。目前,农业机械自动转向研究集中在机械转向和全液压转向器自动化技术改进上,主要方法是在原有的转向系统上加装电机驱动转向或者并联电控转向液压系统[4-5]。现有的自动转向方案技术成本较高,自动转向系统和手动转向系统相互独立。
路径控制算法是农机导航驾驶的核心。近年来,国内外导航路径跟踪控制算法有比例-积分-微分(proportion-integration-differentiation, PID)控制[6]、纯追踪算法[7-12]、模糊控制[13-19]、神经网络[20-21]等。其中,纯追踪算法应用最广泛,并且,为了改善单独的纯追踪算法路径跟踪上线效果不佳问题,研究者对该算法进行了优化改进。如:张闻宇等[22]建立双切圆寻线模型,设置门限参数条件确保转向相切上线,其中对有限的拖拉机门限参数进行设置,使得控制方法适应性有限;陈康等[23]使用两步航向校正模型,在车体已经偏向规划路径时减小期望转向角,对车体航向角进行校正,但试验平均误差较大,衔接过渡不平滑;王辉等[24]以预瞄追踪模型采用二元线性控制律和极点配置方法构建线性最优控制算法,该算法可在小角度线性近似条件下取得较好的效果,但大角度偏差仅考虑了单因素航向偏差不合理问题。上述路径跟踪控制算法通过建立数学分析模型,解决了模型中农机在靠近规划路径时车辆航向与规划路径偏差较大的问题。为了更好地解决这一问题,本文提出了一种基于四轮转向前视距离在线调整路径跟踪算法,该算法根据纯追踪算法决策期望转向角,并以横向偏差、航向偏差作为输入,以前视距离系数为输出的模糊控制在线修整前视距离参数,不仅实现了不同速度前视距离自适应调整,而且解决了上线位置不佳的问题,为农业机械自动驾驶提供了一定的理论依据。
同时,本文设计了一种电控手柄液压转向方案:当进行手动转向操作时,控制器可根据手柄动作行程进行转向角控制;当进行自动转向时,控制器可根据上位机期望转向角完成自动转向。同现有的自动转向方案比较,该方案不需要安装其他执行元件,电控手柄操作灵活,转向精度能满足农机转向控制要求。
1 转向结构设计及线控转向原理
1.1 转向结构设计
3WPZ-750田间管理机采用高地隙通用作业底盘设计[25],结构如图1所示。其转向系统主要由4个独立转向支腿组成,其中转向支腿、转向轴安装固定在支腿套管中,由转向马达提供转向动力。支腿套管上的垂直立板铰接平行四边形结构一端,另一端立板焊接固定在作业底盘上。车轮转向角度传感器旋转轴与转向轴平行布置,安装固定在支腿垂直立板上,通过柔性齿轮与转向轴上的齿轮啮合,实时监测车轮转向角度。车轮转向力矩通过支腿直角支撑架传递至车轮。支腿直角支撑架上部安装行走马达,通过行走链轮箱向车轮传递行走动力。
1.2 自动转向
田间管理机液压转向系统如图2所示。田间管理机液压转向系统由前后轮转向电磁阀串联相应转向马达,每个液压马达并联转向旁通阀,当在两侧车轮出现因负载不同导致转向不同步情况时,控制器控制转向旁通阀进行转向同步性调整。控制器采用线控技术实时监测转向电控手柄目标转向角、转向角度传感器实际转向角,构成转向闭环控制。在转向过程中,控制器控制转向电磁阀上的转向电磁阀动作,当一侧车轮转向至目标角度时,对应的两位三通旁通阀导通该侧车轮,直至两侧车轮转向同步。
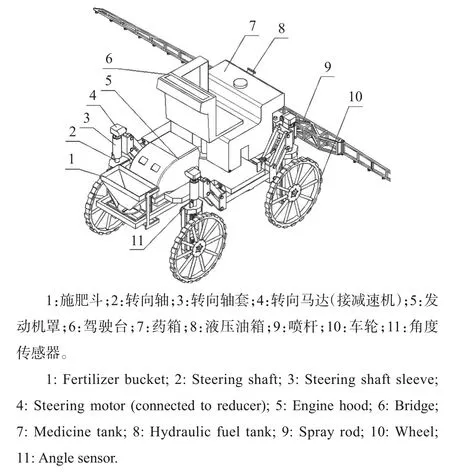
图1 田间管理机机械结构Fig.1 Mechanical structure of field management machine
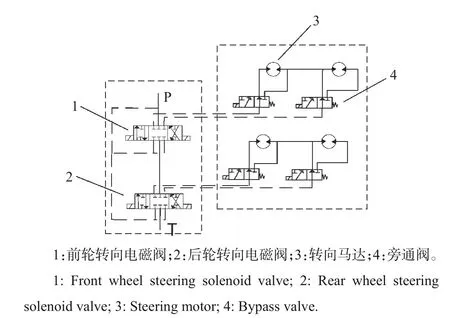
图2 液压转向系统示意图Fig.2 Schematic diagram of hydraulic steering system
为了提高自动液压转向精度,采用卡尔曼滤波方法,减小工作过程中噪声等干扰对角度传感器的影响,试验结果如图3所示。其中,静态无滤波角度传感器电压值标准差为0.03 V,启动后振动噪声干扰角度传感器电压值标准差为0.028 V,启动后卡尔曼滤波角度传感器电压值标准差为0.02 V。表明该方法有效地抑制了工作噪声干扰,角度传感器采样电压值标准差降低了33%左右,提高了自动转向精度。
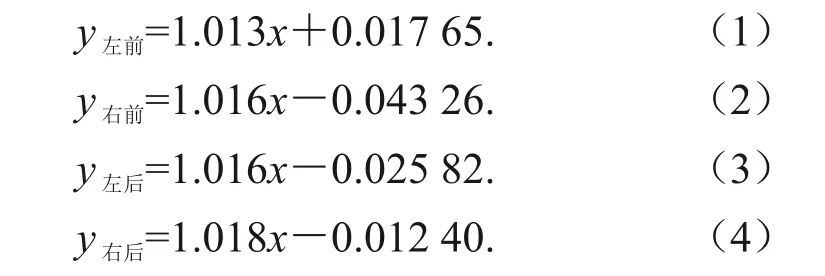
另外,使用电脑向控制器发送单个车轮转向命令后,记录目标转向角和实际车轮转向角,供转向分析。将目标转向角和实际车轮转向角进行线性拟合,得出的左前、右前、左后、右后转向轮线性拟合关系式如下。
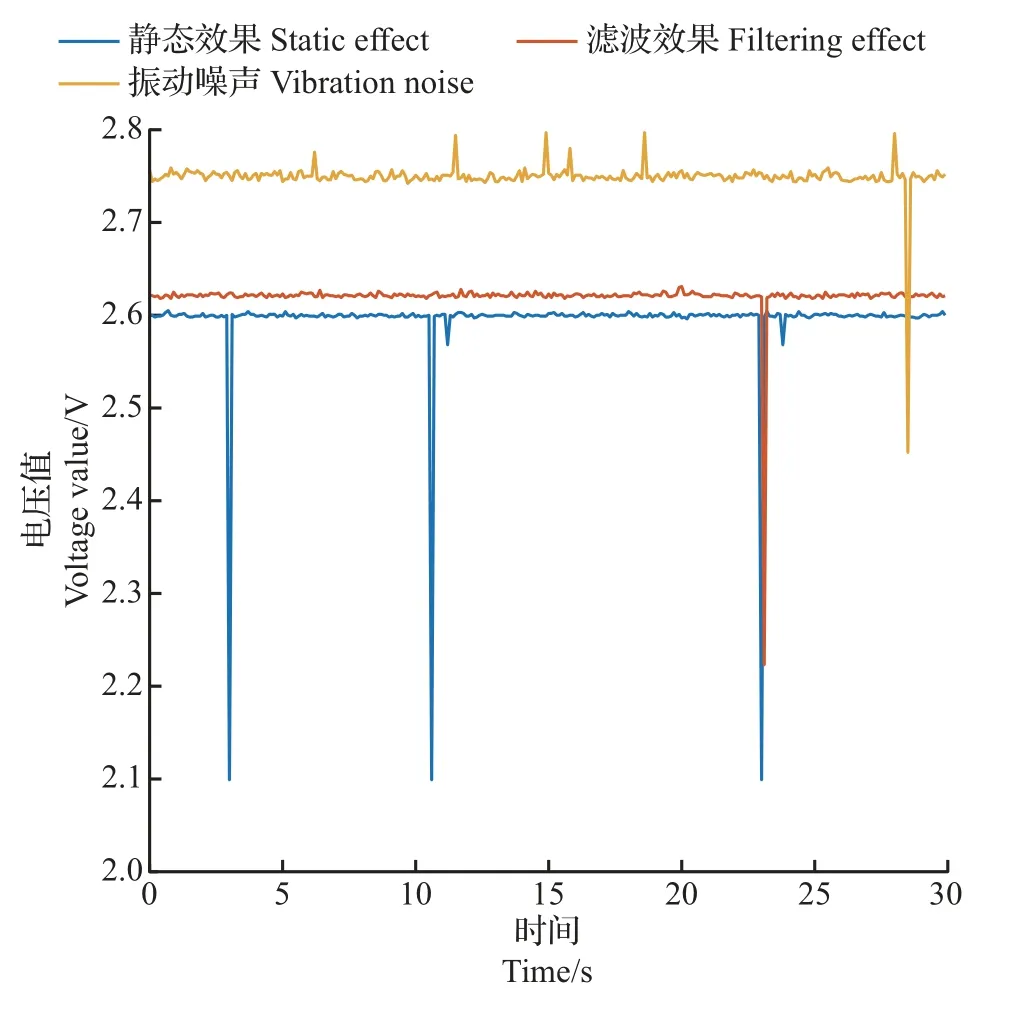
图3 角度传感器去噪效果Fig.3 Denoising effect of angle sensor
转向角误差如图4 所示:角度传感器实际转向角与目标转向角构成的转向闭环控制误差范围为-0.5°~0.5°,满足农业机械自动转向要求。
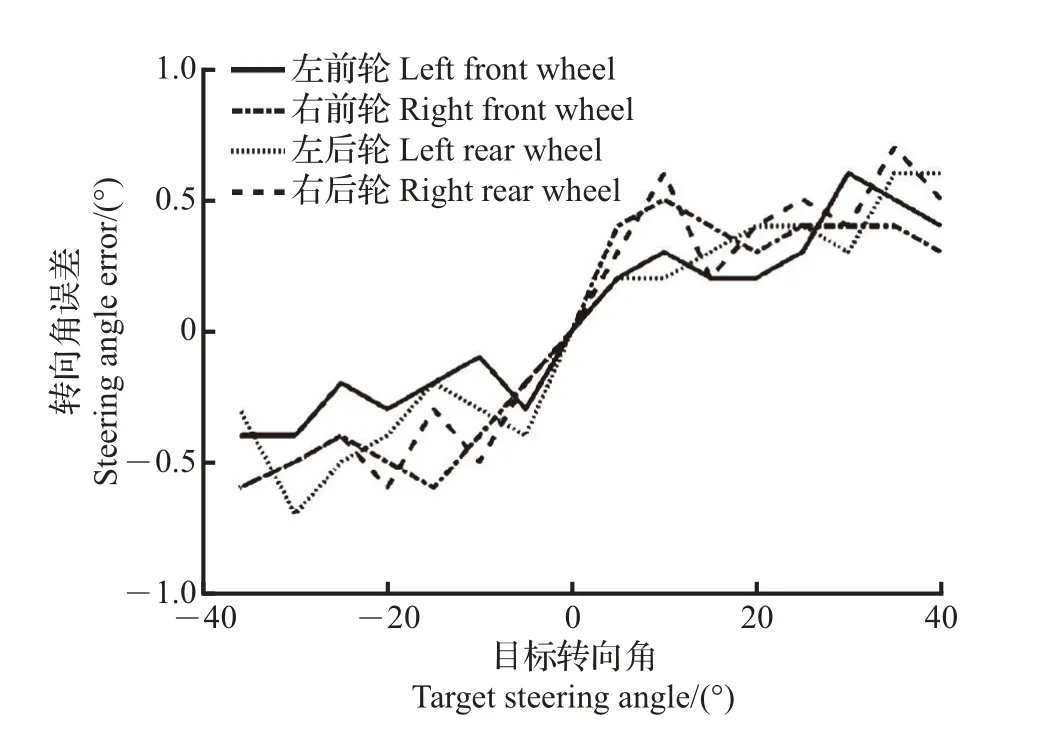
图4 目标转向角与实际转向角误差Fig.4 Error between target steering angle and actual steeringangle
另外,为了评价该自动液压转向系统的响应性,对该液压系统响应时间进行试验。具体试验操作步骤:1)启动田间管理机;2)通过上位机发送“车轮转向30°”的命令;3)使用雷诺液压测试仪实时监测转向马达流量大小;4)从使用的雷诺液压测试仪中导出转向马达运行时间和流量,为自动转向试验结果分析提供参考。测得土槽中土壤湿度为72%时,车轮转向至最大转向角的时间为3.8 s;在水泥路面所需时间为1.9 s。根据转向马达流量、压力数据计算分析,土槽中转向马达进出口压差达8.111 MPa,转向扭矩为145.3 N·m;水泥地面上转向马达进出口压差达1.224 MPa,转向扭矩为21.927 N·m。总体来看,复杂土壤地况所需转向扭矩比水泥平坦地面大,转向响应时间更长,说明自动转向液压系统转向响应和稳定性有效。
2 模型与分析
2.1 路径跟踪技术路线
为了实现路径跟踪功能,本研究在原有车载电子控制单元(electronic control unit, ECU)上设计了一套基于微软集成开发环境(visual studio)的上位机路径跟踪控制界面。上位机接收来自北斗定位系统的车体位姿、速度信息后,通过纯追踪算法搜索规定路径上的预瞄点,经算法处理获得期望的车轮转向角、车速信号,通过串口通信传递到车载控制器,从而控制执行相应转向和行走动作,其技术路线如图5所示。
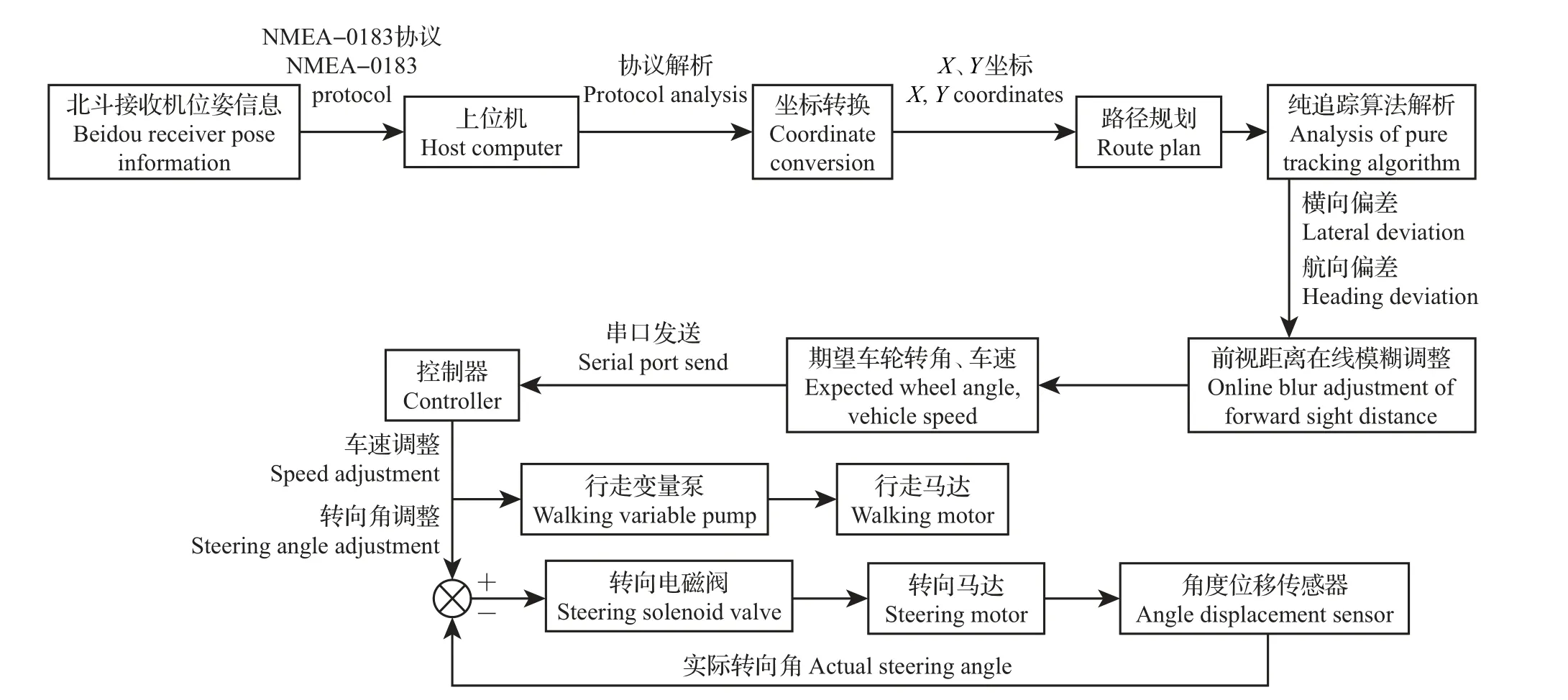
图5 路径跟踪技术路线Fig.5 Technical route of path tracking
2.2 四轮转向模型分析
2.3 纯追踪算法改进
纯追踪模型被广泛应用在车辆和机器人的路径跟踪研究上[26-28]。如图7所示:车体转向中心N(x,y)在规划路径T 上的目标点为M(gx,gy);O 为转向圆心;弧NM 半径为R;L0为横向偏差;θ 为航向偏差;2θ为沿弧NM到目标点M的圆心角;L为车身轴距;E为前视距离。
根据图7,由三角形MNO正弦定理可得:
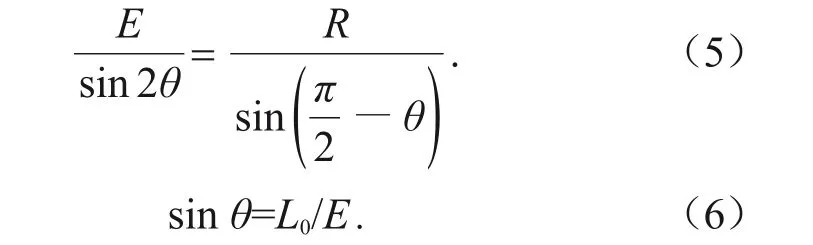
由四轮转向模型分析已知转向角与转向半径的关系如下:

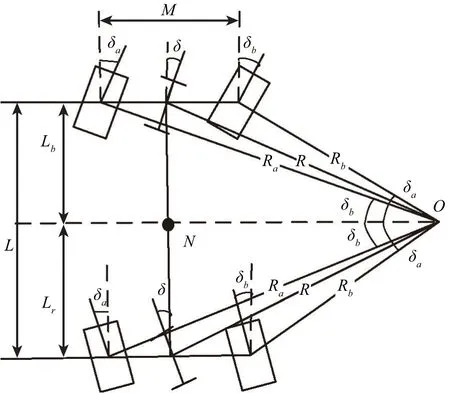
图6 四轮转向模型Fig.6 Model of four-wheel steering
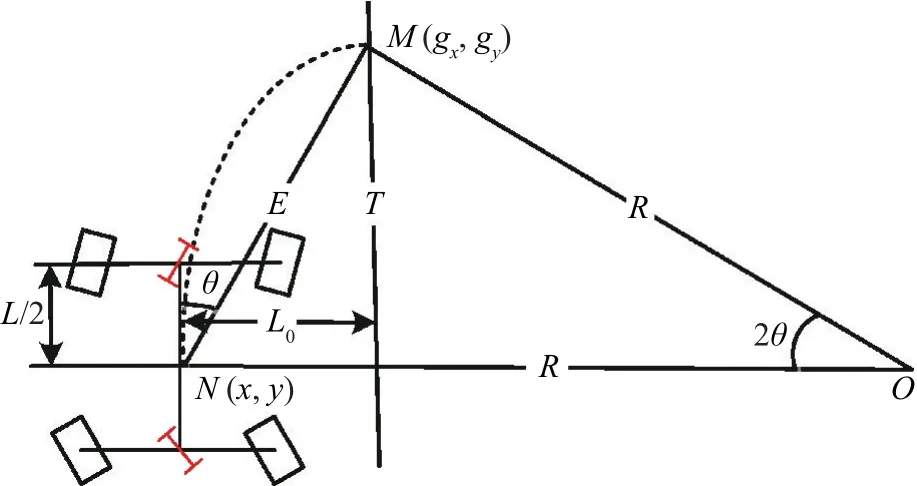
图7 纯追踪模型Fig.7 Pure tracking model
由式(5)~(7)可得车轮转向角与横向偏差、前视距离的关系式:

式(8)阐明了期望车轮转向角与前视距离参数取值问题。固定前视距离不能满足快速上线要求,实时动态最优前视距离参数难以确定。因此,纯追踪模型前视距离应根据横向偏差、航向偏差和车速合理地进行在线动态调整。
前视距离的取值与当前位置横向偏差、航向偏差和车速有直接关系。参考车速与前视距离研究文献[29],车速(v)和前视距离(E)的关系可以表示为:
{2≤E <4 m,0<v <10 km/h;4≤E <5m,10≤v <20 km/h;5≤E <6 m,20≤v <30 km/h.
田间管理机在作业过程中车速较低且变化不大,通常认为是匀速作业,车速为前视距离取值提供了参考区间。所以,前视距离在线动态调整时应以横向偏差、航向偏差作为模糊控制输入,获取该车速区间内前视距离值。
根据实际驾驶操作,前视距离在线调整模糊控制器的规则是:当航向偏差和横向偏差较大时,减小前视距离来消除偏差,使农机航向偏差和横向偏差迅速得到纠正;当航向偏差和横向偏差较小时,以增大前视距离来使农机稳定地沿规划路径行驶[30-32]。前视距离在线调整主要是指在某一车速区间内调整横向偏差和航向偏差的权重,以得到较好的在线前视距离[33],前视距离在线调整模糊控制规则如表1 所示。通过田间管理机实际操作,定义车体横向偏差、航向偏差相对规划路径左偏差为负值,右偏差为正值;车轮转向角相对车轮零度角左偏差为正值,右偏差为负值,最大转向角为30°。
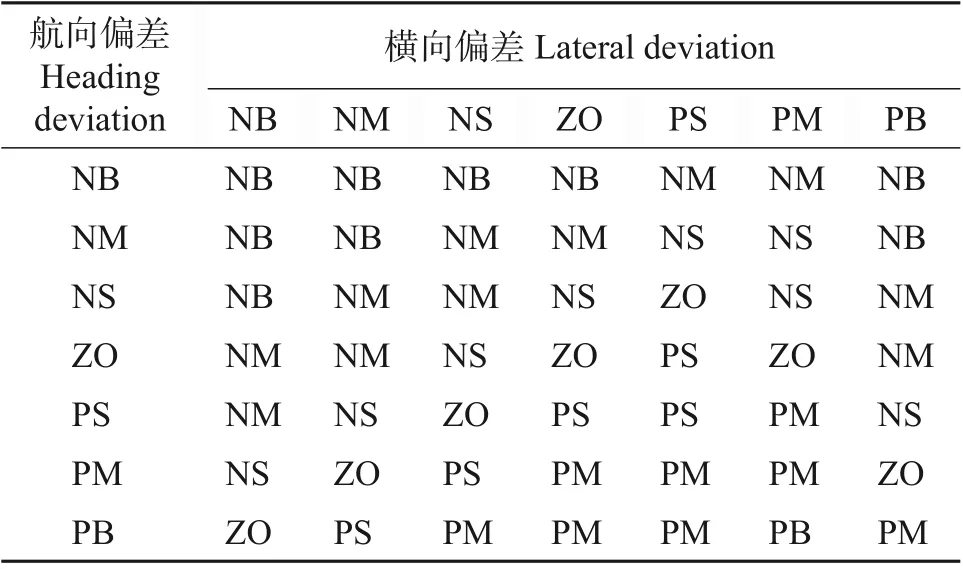
表1 模糊控制规则表Table 1 Regulation table of fuzzy control
横向偏差L0基本论域为[-0.6 m,0.6 m],量化等级为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},量化因子KL0为0.1。航向偏差θ 基本论域[-90°,90°],量化等级为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},量化因子Kθ为1/15。前视距离控值系数k 基本论域为[0,1 m],量化等级为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},量化因子Kk为6。
由前视距离模糊控制系数与实时车速前视距离区间得到的前视距离表达式为:

式中:k为前视距离模糊控制系数;SE为实时车速前视距离区间长度值;E0为实时车速前视距离基值。
使用MATLAB软件对该算法模型进行仿真,设定相关初始条件:横向偏差为2 m,航向偏差为53°,初始车轮转向角度为0,仿真车速为2 m/s,k取值为1,SE为1 m,E0为2 m。仿真结果如图8所示。从中可知,在横向偏差2 m 的条件下,车体横向偏差在2 s 靠近规划路径,其中航向偏差、转向角度突然变化是根据模糊控制规则为了稳定完成上线操作对前视距离动态调整引起的,4 s 后车体横向偏差、航向偏差满足田间管理机上线稳定要求。从整体上看,该路径跟踪方法能迅速消除横向偏差,振荡较小,上线曲线平滑,具有较好的动态特性。表明该前视距离在线调整路径跟踪算法对提高田间管理机上线响应性和稳定性是可行的。
3 验证与讨论
3.1 试验平台信息
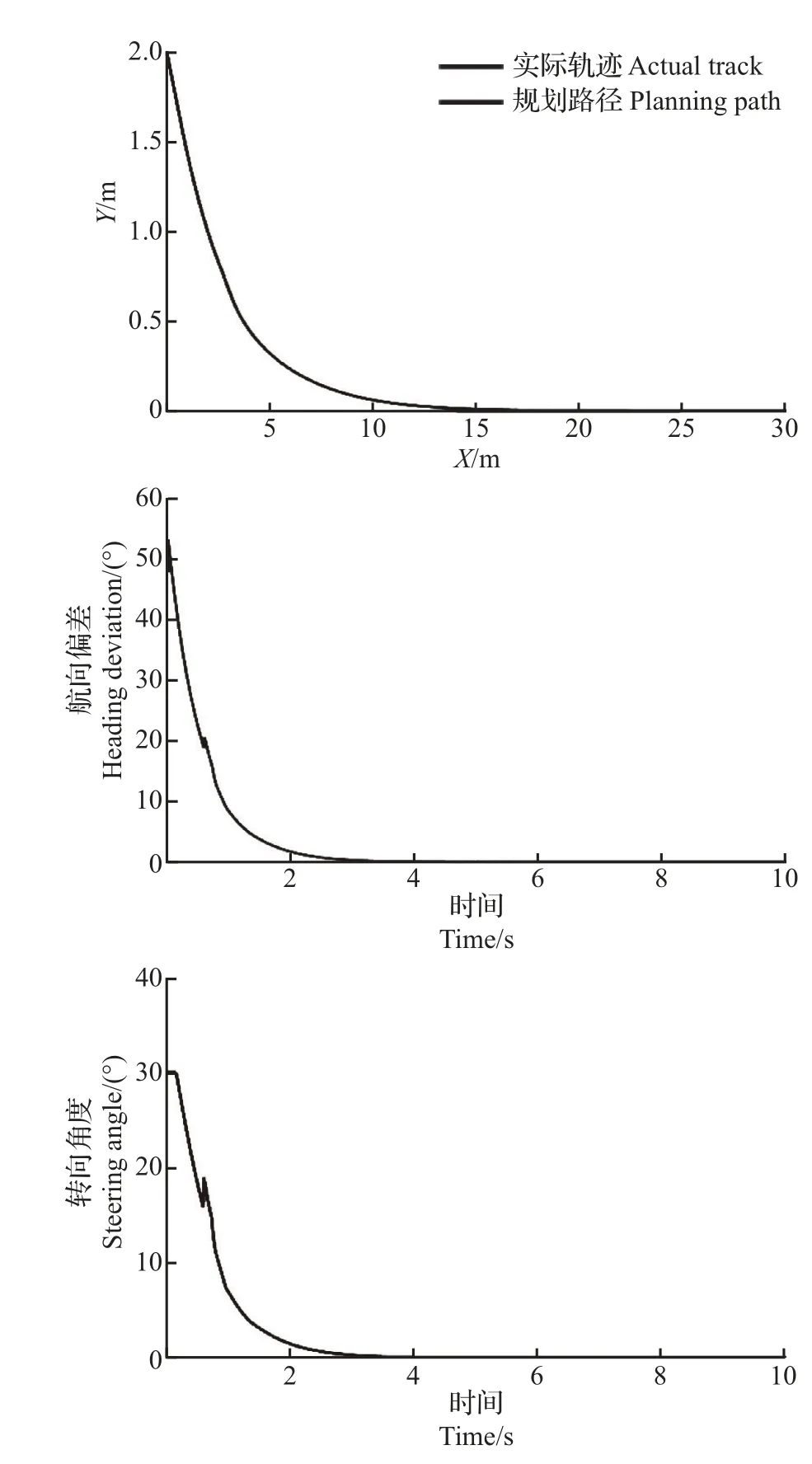
图8 仿真效果Fig.8 Simulation effect
田间管理机试验平台如图9 所示,其搭载了北斗定位系统、上位机、控制器、液压执行元件等。北斗定位系统采用“合众思壮壁虎”北斗高精度全球导航卫星系统差分接收机,差分定位精度为2 cm;采用Robobrain公司的霍尔型角度传感器,基本参数为工作电压DC-24 V,输出0~5 V 模拟量信号,精度为0.5%FS。试验平台上位机技术路线设计思路:上位机先将北斗定位的经纬度投影转换至平面坐标,其中高斯投影采用我国2000 国家大地坐标系椭球参数;然后利用纯追踪算法模型搜索规划路径上的预瞄点,以获取当前位置下的横向偏差、航向偏差和车速,经前视距离在线调整后得出期望四轮转向角。

图9 试验平台Fig.9 Experimental platform
3.2 直线路径跟踪试验
为验证路径跟踪效果,分别在水泥路面和田间不同作业环境下进行直线跟踪试验。具体试验过程如下:1)在试验场地预先使用北斗定位系统规划好跟踪路径;2)将田间管理机放置在规划路径起点;3)启动田间管理机,置油门开度于1/2 处;4)田间管理机从规划路径起点处开始行走,上位机导航控制界面通过实时监控四轮转向角实现田间管理机沿规划路径直线跟踪,至规划路径终点;5)从上位机导航控制界面导出路径跟踪过程参数,为后续试验结果分析提供参考依据。路径跟踪过程参数主要有实时行驶轨迹定位坐标、横向偏差、航向偏差等,实验数据处理结果均以一次路径跟踪所得。水泥路面场地为湖南农业大学西篮球场,水田试验场地为湖南农业大学耘园水稻试验田,水稻生长处于灌浆结实期,土质较黏。
田间管理机在水泥路面直线路径跟踪时车辆摆放初始横向偏差、航向偏差较大,横向偏差实际测量值为0.1 m,但上线后行驶轨迹与规划路径基本一致,水泥路面试验中行驶轨迹如图10所示。在水田直线路径跟踪时,由于场地条件有限,车辆摆放初始横向偏差、航向偏差较小,横向偏差实际测量值为0.05 m,且车轮下陷量较大,实际测量值为25 cm,晃动较小,水田试验中行驶轨迹如11 图所示。试验结果表明:在上线过程中水泥路面路径跟踪误差均值为6.92 cm,标准差为4.84 cm;水田路径跟踪误差均值为2.25 cm,标准差为1.35 cm。在不同环境下,路径跟踪控制偏差基本符合设计要求,但在水泥路面试验效果较水田试验效果差。分析原因可知:田间管理机在水泥路面和水田中的车轮附着力不相同,水田环境下因土壤较黏,车轮下陷,车轮附着力大于水泥路面。且当在水泥路面行走时液压系统中分流集流阀未达到最佳分流状态,4个车轮转速不一致,致使田间管理机不停地进行转向上线调整,跟踪误差较大;而在水田环境下田间管理机车轮同步误差较小,虽然在开始进行跟踪时位置误差较大,但靠近规划路径后,车体会沿着以前的车辙继续行驶,跟踪误差明显减小。
3.3 曲线路径跟踪试验
参考农艺农机作业规范要求和路径规划转向方式,田间管理机在大田进行植保作业时完成一行后需转向180°才能进入另一行继续作业。因作业宽幅为12 m,故采用牛耕法弓形转向换行作业操作。所以,田间管理机曲线路径跟踪试验采用最小转弯半径定曲率曲线机进行跟踪试验,跟踪车速设置为0.2 m/s,具体试验步骤参考直线路径跟踪试验。如图12~13所示:在水泥路面定曲率曲线路径跟踪误差均值为12.49 cm,标准差为9.16 cm;在水田路径跟踪误差均值为8.72 cm,标准差为5.59 cm。对水泥路面和水田曲线路径跟踪试验结果进行分析,水田曲线跟踪试验车轮在泥土中有25 cm 左右沉陷,前后车轮转向附着力比水泥路面大,因此在进行转向时,行走液压系统中分流集流阀达到最佳分流状态,车轮速度同步误差小,致使水田曲线跟踪效果优于水泥路面曲线跟踪效果。
4 结论
目前,我国农业机械自动导航技术多在原来的全液压或机械转向上进行自动转向改装,采用纯追踪算法作路径跟踪;其纯追踪算法多以两因素进行分析。这种方法虽然能达到自动驾驶目的,但人工驾驶、自动驾驶转向系统不能共用一种设计方案,成本较高,不利于广泛应用。
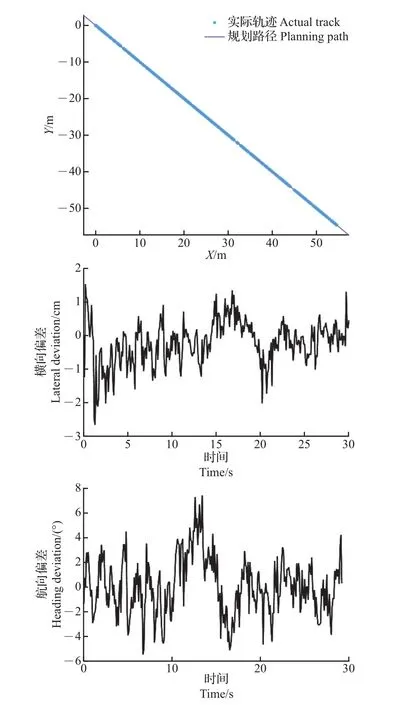
图10 水泥路面试验效果Fig.10 Experimental effect on cement pavement
本研究采用四轮独立液压转向设计方案,不同于前轮转向模型路径跟踪,并以车载控制器作为中控单元来有效地将人工驾驶、自动驾驶转向系统结合,并以速度、横向偏差、航向偏差三因素优化纯追踪算法前视距离参数,解决了四轮独立自动转向设计方案和纯追踪算法多因素影响问题,减少了相应成本。并通过微软集成开发环境(visual studio)建立了上位机软件控制系统,以及通过MATLAB软件进行上线仿真,得到4 s稳定上线结果,能够满足田间管理机自动导航的功能,为实际应用提供了一定的依据。
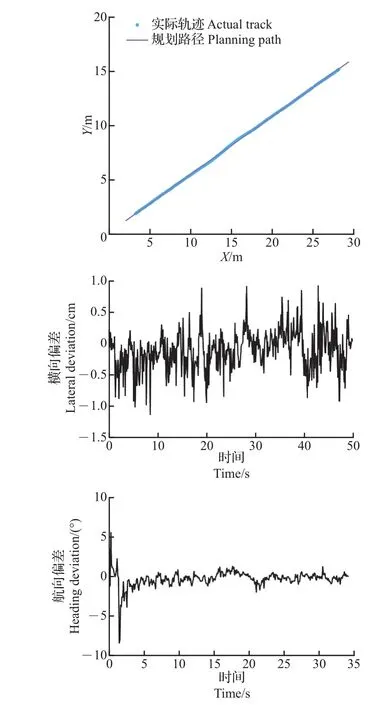
图11 水田试验效果Fig.11 Experimental effect of paddy field
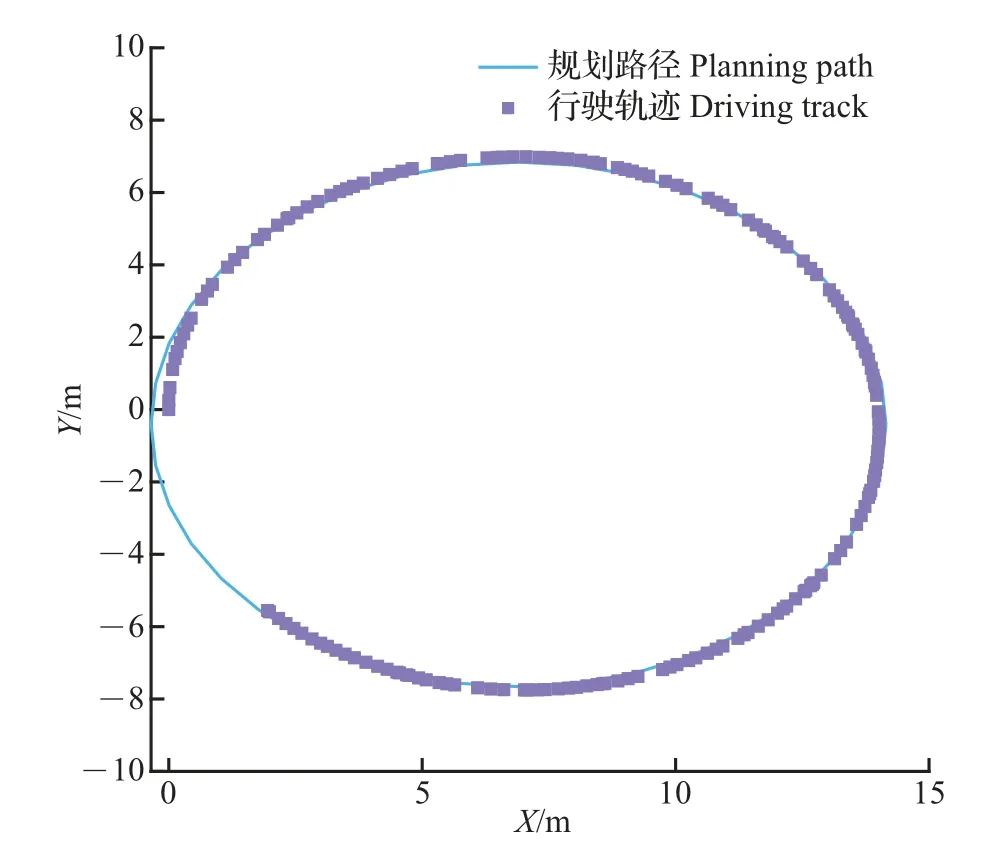
图12 水泥路面曲线跟踪Fig.12 Curve tracking on cement pavement
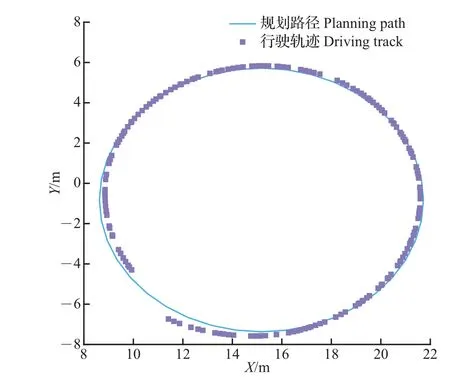
图13 水田曲线跟踪Fig.13 Curve tracking in paddy field
试验结果表明:在0.5 m/s的车速下,田间管理机在水泥路面环境下,路径跟踪误差均值为6.92 cm,其标准差为4.84 cm,定曲率曲线路径跟踪误差均值为12.49 cm,其标准差为9.16 cm;在0.2 m/s 的车速下,田间管理机在南方水田环境下,路径跟踪误差均值为2.25 cm,其标准差为1.35 cm,定曲率曲线路径跟踪误差均值为8.72 cm,其标准差为5.59 cm。通过MATLAB 软件仿真、路面与田间试验验证,其自动导航效果能够满足田间管理机行驶和田间作业需要。所以,本研究的路径跟踪系统符合农业机械自动导航的设计要求。
在试验过程中,发现影响田间作业环境的因素较多,其中,水田土壤坚实度不同对田间管理机四轮自动转向的同步性也不同,后续有待进一步研究水田不同土壤坚实度对四轮转向同步性的影响,以调整相应转向液压设计参数,保证水田四轮转向同步性和响应时间。此外,还需进一步研究该路径跟踪算法响应时间、误差精度以及转向支腿结构的设计。