智能驾驶车辆环境感知传感器的布置
2020-09-14冯丽
冯丽

摘 要:环境感知是智能驾驶四大核心技术之一,为智能车采集各类环境信息,给路径规划提供决策依据,本文结合某车型的感知传感器布置方案,给出相关传感器在实际布置中的规则。
关键词:智能驾驶 环境感知 传感器 布置
1 引言
智能驾驶车辆对于环境的感知要求较高,每种类型的传感器都具有其独特优势和运用场景,各行其是的运用不仅有短板[1],也达不到全方位探测的目的。仅使用视觉摄像头,目标运动状态及距离判断不够精确;仅使用超声波雷达不能满足远距离、标志识别;仅用激光雷虽然满足了距离与精度,但烟、尘、雾影响较大[2],成本代价太大,不足能满足量产落地需求,智能驾驶对于传感器的需求势必走向多种类融合的局势。
2 车企智能驾驶环境感知配置方案
某车型配置前向侧向激光雷达、角毫米波雷达、前向毫米波雷达、单目前置摄像头,超声波雷达。前向激光雷达用于实现较高精度远距离扫描,侧向雷达用于相邻车道车辆检测,前视摄像头感知交通信号灯、交通标识等信息,角毫米波雷达弥补车辆四角处盲区,前向毫米波雷达探测中远程范围内行人、车辆,同时与角毫米波雷达构成一定范围内的冗余设计,超声波雷达实现车辆5米内障碍物探测,以此达到对车辆周围环境全面感知。
3 各类感知器件布置
3.1 视觉摄像头布置规则
布置高度由地面最近探测点同摄像头视野中心的连线与水平面夹角构成的直角三角形依据勾股定理推测得出,探测范围由每个摄像头的视场角决定。当摄像头倾斜角度、高度确定后,仍有小范围内偏差,可通过调整摄像头内部结构进行微调。该调整角度一般为5°左右。通常前挡风玻璃处的前视摄像安装高度为1500mm~1800mm,对于360环视前摄像头较多安装于前格栅处,利用格栅对摄像头进行隐藏,起到一定程度上的美观作用,左右摄像头安装于后视镜处,后视摄像头与普通倒车影像摄像头在布置上差别不大,主要满足视图中的车身占比20%左右,牌照板几何视角和照明法规角度,如图1和图2所示。
3.2 超声波雷达布置规则
对于车前雷达一般布置在400mm-550mm高度,车后保险杠处400mm-65mm;超声波雷达因其探测距离较近,价格低,主要考虑对车辆全周的覆盖,依据其探测波束角度大小覆盖范围来确定雷达探头的个数,当前主流用法是8-12个。
3.3 毫米波雷达布置规则
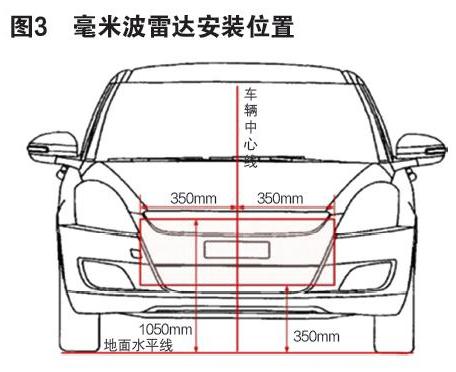
前向毫米波高度离地700mm左右,可在以车辆中心线为对称轴的左右350mm内进行布置,如图3所示,虽然算法可在一定程度上进行参数修正,一般布置于中线处居多。安装时水平偏差角度±2°,垂直偏差角度±1°。因雷达的波束中心面需与路面基本平行,避免因安装角度导致与路面的夹角大于5°[2]。角毫米波雷达的离地高度可与前向毫米波雷达保持一致,呈对称方式布置在车身四角处,车辆前部的角毫米雷达与车身侧垂直面角度呈45°,车辆后角毫米波雷达呈15°至30°,因不同车型对区域功能需要各异,可根据整车盲区的要求对角度偏转做调整,达到最佳的探测区域。
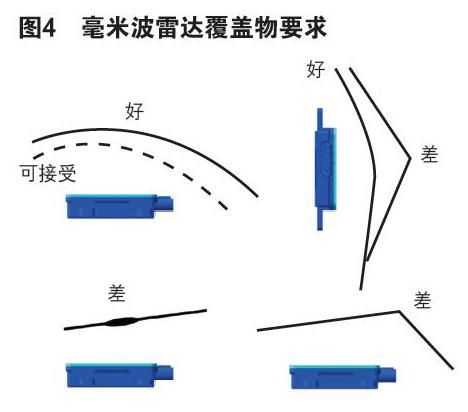
一般为了保证毫米波雷达探测距离远、尽可能多的探测目标数,采用外露布置,但外露布置对造型美观有较大影响,必要时需考虑隐藏布置,此时覆盖面与雷达之间保持20mm距离,距离内的探测区域应避免出卡子、螺钉、金属物体,同时,覆盖面必须保证平整且平滑、厚度均匀,表面粗糙度小于400um,避免出现棱骨、尖角、切向厚度突变(见图4),以此减小毫米波在反射时发生偏转、损耗等。
因材料会对电磁波产生干扰而降低毫米波雷达性能,故对于覆盖材料及厚度也有严格要求,下表1为不同材料厚度对毫米波的损耗。在对整车环境感知布置时需提前将特殊要求输入给造型及内外饰,防止因后续空间、材料、结构上的限制带来的性能降级。
3.4 激光雷达布置规则
激光雷达离地高度需根据功能需求而定,一般情况下为充分发挥混合固态激光雷达高精度、远距离测量优势,将其安装于车顶(因激光雷达垂直探測角度有限,目前有32°角,可根据需求距离运用三角函数计算对地高度),设计时倾斜角尽量不要超过90度,角度过大时会对缩短激光雷达使用寿命;长距前向激光雷达倾斜角度可在5°范围内,保证车辆正前方环境扫描,用于侧向的激光雷达倾斜角度30°左右,以保证中近车道区域内探测。因激光雷达体积较大,固定底座需平整,避免出现凹凸不平现象,且底座使用铝合金材质,有助于散热。
4 结语
在多传感器融合下,每个传感器不再是单独的个体,需要在整体布局下满足自身的布置要求,才能使感知系统中的每类传感器发挥出最大能效。同时,面对价格差距较大的各类传感器,车企需要对智能驾驶功能的定义有清晰的判断,各类传感器的性能、运用场景有较好的认识,再结合自身功能需求,才能满足车企定位要求下高性价比造车。
参考文献:
[1]王磊.浅谈智能驾驶中的环境感知[J].智能网联汽车,2018(8):27-29.
[2]陈晓东.智能驾驶车载激光雷达关键技术与应用算法[J].光电工程,2019,46(7):190182.
[3]陆炳华.智能驾驶汽车传感器介绍及布置[J].上海汽车,2017(11):40-43.