容积卡尔曼滤波在车辆定位中的应用研究
2020-09-12卞月根

摘 要: 在万物互联的时代,交通系统中精准的车辆位置信息显得尤为重要。为了能够得到准确的车辆位置,通过硬件采集到基本数据后,可再经过一系列数据处理,能够一定程度上提高车辆定位的精度。本文将自适应的交互多模算法和容积卡尔曼滤波算法(CKF)相结合,能适应车辆的各种机动状态。仿真实验表明,交互多模容积卡尔曼滤波算法的定位精度相较于容积卡尔曼滤波算法的定位精度能够提升25%左右。
关键词: 车辆定位;容积卡尔曼滤波;交互多模算法
當今是一个万物互联的时代,而“智能交通”[1]是一种先进的技术,其需要以一系列的交通设施为依托,将信息采集技术、传感器技术、无线通信技术、计算机技术、自动化控制技术集合应用于整个交通管理系统。由此建立的综合交通管理体系能够在大范围内,实时、准确、高效、全方位地实现自动化交通管理,是现代交通进入信息化时代的重要标志。
本文采用容积卡尔曼滤波算法[2-4]作为基本定位算法,但是容积卡尔曼滤波算法无法自动适应车载的运动状态变化,当车载突然加减速或者转弯时,会出现较大的定位误差出。本文将交互多模算法与其结合,能较好地解决这一问题。
1 交互多模容积卡尔曼滤波算法
交互多模[5-6]CKF作为一种自适应算法,通过构建多个车载运动模型,对每一个车载运动模型都利用CKF算法进行滤波,利用多个滤波器与实际系统中的多种运动状态相匹配,然后依据似然函数的大小决定某一子滤波器的滤波结果在系统总输出中的占比,最后融合输出。
假定系统选取了含有r个模型的模型集,模型i转移到模型j的转移概率为Pij。
则交互多模CKF算法的流程可以表示为以下几个步骤[5-7]:
步骤1:计算各个CKF滤波器的混合输入。
步骤2:r个CKF并行滤波,每个滤波器得到各自新的状态估计和协方差矩阵。
步骤3:计算各个CKF滤波器对应模型的似然函数。
步骤4:r个模型进行概率更新。确定各个模型在总输出中的所占比例。
步骤5:r个CKF滤波器融合输出。公式(1)和(2)描述如何将r个CKF滤波器的状态预计与协方差矩阵进行融合输出。
X ^ (k|k)=∑ r j=1 μj(k)X ^ j(k|k) (1)
P(k|k)= ∑ r j=1 μj(k){Pj(k|k)+[X ^ j(k|k)-X ^ (k|k)]
×[X ^ j(k|k)-X ^ (k|k)]T} (2)
X ^ (k|k)是当前时刻总的融合输出,X ^ j(k|k)是第j个滤波器的输出,μj是第j个滤波器输出占比,P(k|k)是总的输出协方差矩阵。
至此,交互多模CKF算法的一个滤波周期到此也就完成了。由于采用了多个模型,这样当车载运动状态发生改变时,总能找到最适合描述车辆当前运动状态的模型。通过概率更新将此模型的概率设置为最大,这样最终滤波输出就能最接近实际值。
2 仿真分析
由于受实验条件的限制,本文在仿真时,首先对车载的运动轨迹进行假设模拟并记录,然后在真实的位置信息加上均值为零方差为10的高斯随机噪声作为观测向量。仿真工具是MATLAB R2010a,PC环境为Windows XP。
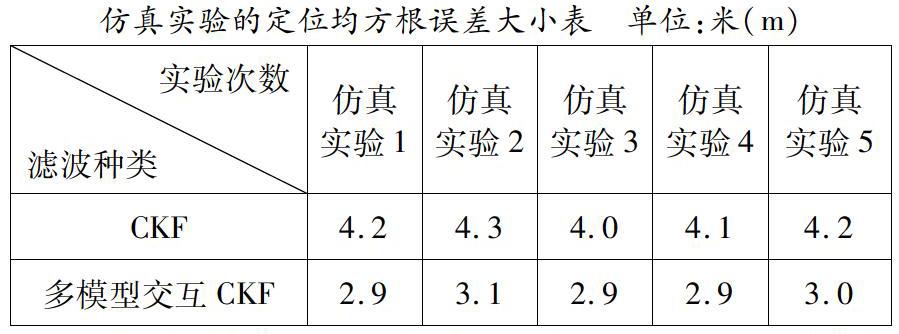
车辆运动轨迹:车辆在二维平面内做简单S形运动。现分别采用CKF算法和交互多模CKF算法对车辆定位信息进行滤波。下表是五次仿真试验的结果。
仿真实验结果分析:多模型交互CKF比CKF的定位精度提高了有25%左右,能够对车辆运动的机动突变,进行应变处理。
3 结语
交互多模容积卡尔曼滤波算法对车载的定位效果优于容积卡尔曼滤波算法,这种提升效果在车载运动状态转换时刻表现的尤其明显。交互多模CKF和容积卡尔曼滤波的核心算法都是非线性的卡尔曼滤波算法,前者之所以有定位效果的提升主要是因为交互多模CKF算法结合了交互多模这种自适应算法,能够在车载运动状态的转换时,找到最适合描述车载运动状态的模型,而单独的容积卡尔曼滤波算法则不能做到这点。
参考文献:
[1]梁伟,郑印,王沁艳,等.智能交通系统消息交换的复杂度研究[J].计算机技术与发展,2014,(01):81-84.
[2]唐李军.Cubature卡尔曼滤波及其在导航中的应用研究[D].哈尔滨:哈尔滨工程大学博士论文,2012.
[3]史军.基于容积卡尔曼滤波的船舶非线性观测器研究[D].哈尔滨:哈尔滨工程大学博士论文,2013.
[4]葛磊.容积卡尔曼滤波算法研究及其在导航中的应用[D].哈尔滨:哈尔滨工程大学博士论文,2013.
[5]张会先.自适应滤波算法的研究与应用[D].西安:西安电子科技大学硕士论文,2012.
[6]胡炜.交互多模型目标跟踪算法的研究[D].沈阳:东北大学硕士论文,2010.
作者简介: 卞月根(1989—),男,江苏盐城人,硕士研究生,助教,研究方向为物联网、导航定位。
