基于嵌入式的自动泊车系统研究
2020-09-12熊能孙梅
熊能 孙梅
摘 要: 本文针对某品牌车型的自动泊车问题,进行了自动泊车系统的研究。通过对自动泊车过程的各个环节进行分析,设计了一种自动泊车系统。该控制系统能实现停车辅助、自动泊车3个功能,对新手驾驶员、交通拥堵停车困难的路况都有很大帮助,并能提升驾驶员的驾乘感受。
关键词: 自动泊车;嵌入式系统;多路径规划
随着小汽车在我国的逐渐普及,车位越来越紧缺,泊车愈发困难,新手驾驶员泊车难已经成为普遍问题。自动泊车指车辆可自动搜索停车位并完成泊入和泊出,在车辆搜索到车位后,驾驶员只需要按自动泊车提示信息进行档位切换,在泊车时驾驶员要注意控制车速,驾驶员不必操作方向盘[1]。该系统对新手驾驶员、交通拥堵停车困难的路况都有很大帮助,并能提升驾驶员的驾乘感受。郭剑鹰等人设计了基于多视觉传感器的泊车辅助系统[2],胡文等人进行了基于驾驶员经验的自动泊车规划算法研究[3],张持等人进行了基于两段圆弧的倒推式平行泊车路径规划方法研究[4],李艳红等人进行了基于嵌入式的智能寻迹泊车系统研究[5]。本文基于嵌入式系统,设计了一种自动泊车系统,解决帮助新手驾驶员在拥堵环境下停车的问题,达到提升驾乘感受的目的。
1 系统总体设计
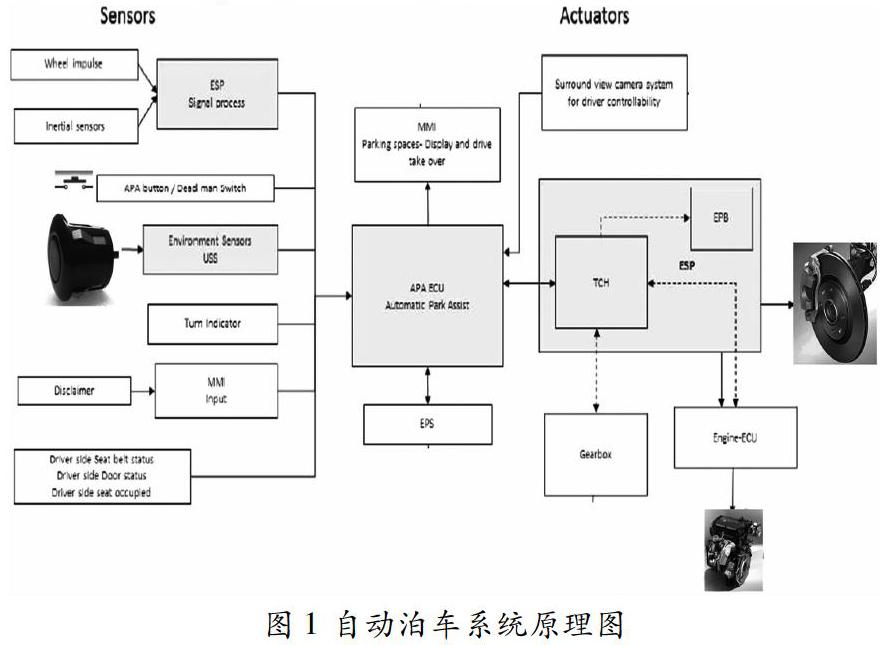
本文所设计自动泊车系统由三部分组成[6],分别是测量模块、控制器模块和执行显示模块。测量模块通过车身四周的4个长距离超声波雷达和8颗短距离超声波雷达测量车辆周围的环境参数;控制器模块即ECU单元,根据测量模块获得的相关参数进行泊车轨迹规划,同时控制车辆的方向盘使车辆按照规划轨迹行驶,并且当车辆偏离规划路径时,控制器能对车辆行驶路径进行校正;执行显示模块可以显示车辆的控制状态信息,当紧急情况出现时驾驶员能随时介入,从而使泊车安全得到保障。自動泊车系统原理图如图1所示。
车辆自动泊车之前需要规划车辆从起点到目标点的路径[7],此路径需满足:(1)车辆按该路径行驶不会与任何障碍发生触碰;(2)该路径是一条从起点到终点、符合车辆运动特性的轨迹线。通常的泊车路径规划方法是以两圆弧相切式为代表的曲率不连续的路径生成方法。此方法简单可行,可应用于多种工况。本文所设计自动泊车系统采用多路径规划算法。车辆驶出泊车位时车辆后轴中心点的轨迹即为泊车路径规划所需的轨迹参数。
2 系统信号交互设计
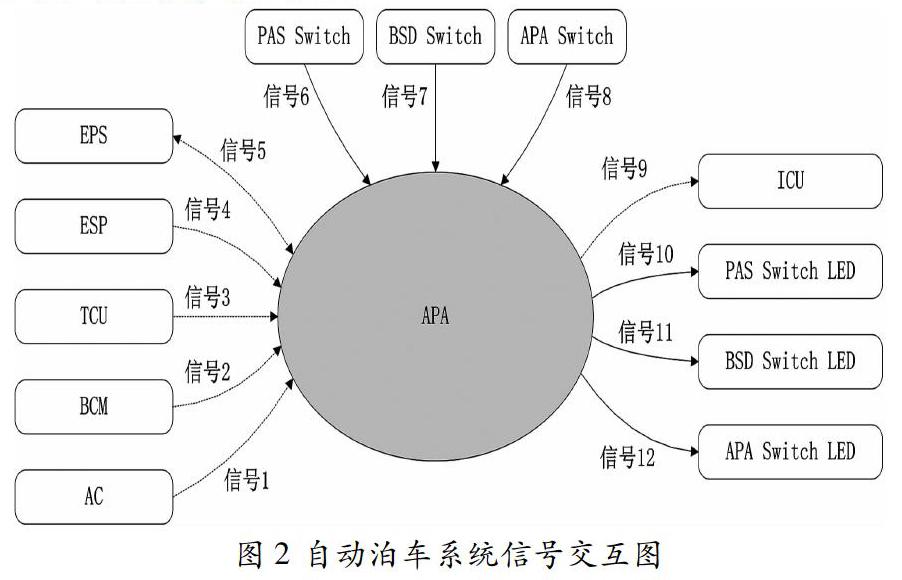
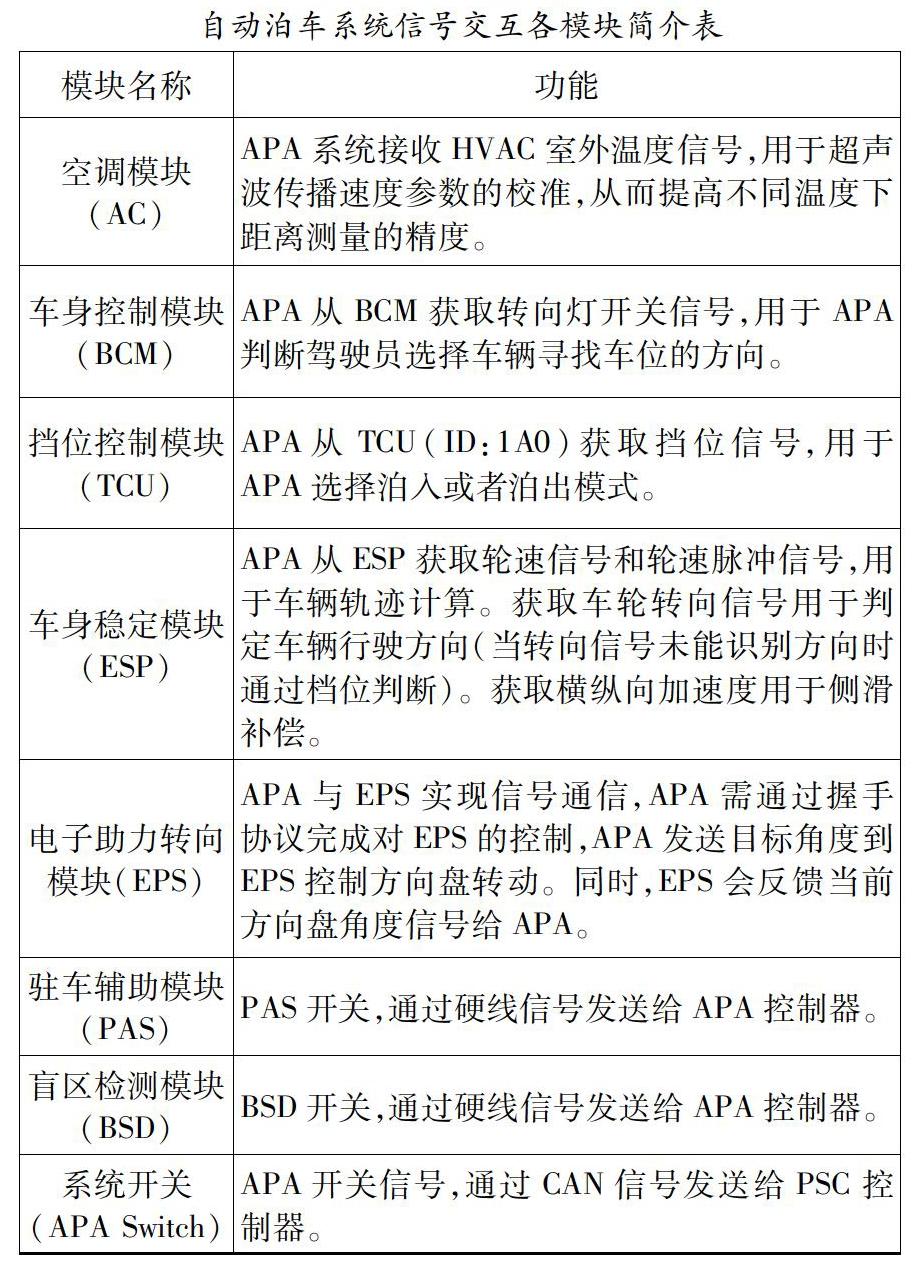
本文所设计自动泊车系统中,与自动泊车系统(APA)发生信号交互的模块包括:空调模块(AC)、车身控制模块(BCM)、档位控制模块(TCU)、车身稳定模块(ESP)、电子助力转向模块(EPS)、驻车辅助模块(PAS)开关及指示灯、盲区检测模块(BSD)开关及指示灯、APA开关及指示灯、仪表控制模块(ICU)。如图2所示,其中箭头方向表示信号走向,该信号交互图的详细介绍列如下表。
3 系统功能介绍
系统工作状态包括:泊出功能和泊入功能。
3.1 泊出功能
当在R挡按下系统开关并选择方向时,系统进入泊出环境检测状态,检测车辆周边环境需同时满足以下条件,系统进入进入泊车引导状态。
系统检测车辆侧边障碍物间隙均大于3000mm、停车位大于车辆长度+750mm且距离前车小于1800mm。当系统检测到车位不满足条件时,需要发送对应状态信号,用于HMI显示:
(1)当车辆侧边障碍物间隙小于3000mm或者停车位小于车辆长度+750mm时:系统提示驾驶员停车位过小,退出自动泊车;
(2)距离前车大于1800mm时,系统提示驾驶员路径顺畅,请自行泊出。
3.2 泊入功能
在搜索到车位或检测泊出环境满足要求之后,系统会与EPS完成握手,并提示驾驶员操作挡位及刹车,直到泊车成功的过程。现以平行泊车为例。平行泊车指引从找到车位开始,到停车完成结束,将泊车指引状态划分为多个过程,如图3所示。
(1)泊车指引①:车辆搜索到平行车位后,继续向前行驶到车位关键点时,系统会提示驾驶员停车,发送停车信号给HMI显示,系统检测到车辆静止后,发送切换挡位至R挡信号给HMI显示。若驾驶员未停车继续前行,则在行驶16m后放弃该车位。
(2)泊车指引①→泊车指引②:当整车速度小于0.5的时长大于1000ms、倒档时间大于500ms且EPS处于可控制状态中时,PSC系统发送请求与EPS握手信号,同时系统发送“转向干预开始,请注意周围环境”提示信息给HMI显示。
(3)泊车指引②→泊车指引③:从泊车指引②过程切换到泊车指引③过程的触发条件主要有以下三个:
a.泊车姿态横向姿态合格,即达到目标车身角度,如车身与路沿平行。
b.车辆到达系统内部判定的换挡关键位置,如后轮要压到马路沿时。
c.后保任一雷达探头检测到障碍物距离小于30cm时。
在满足泊车指引②过程结束条件后,系统发送“请停车”提示信息给HMI显示。
系统检测到车速为0、挡位切换到D挡后,系统发送“请向前行驶”提示信息,开始执行泊车指引③过程。
(4)泊车指引③→泊车指引④:从泊车指引③过程切换到泊车指引④过程的触发条件主要有以下三个:
a.泊车姿态横向姿态合格,即达到目标车身角度,如车身与路沿平行。
b.车辆到达系统内部判定的换挡关键位置。
c.前保任一雷达探头检测到障碍物距离小于30cm时。
在满足泊车指引③过程结束条件后,系统发送“请停车”提示信息给HMI显示。系统检测到车速为0、挡位切换到R挡后,系统发送“请向后行驶”提示信息,开始执行泊车指引④过程。之后重复此泊车过程,直到泊车完成为止。
4 结语
本文基于嵌入式系统,采用多路径规划算法,设计了一种自动泊车系统。该系统能自动搜索停车位,并辅助驾驶员完成泊入和泊出功能,对新手驾驶员、交通拥堵停车困难的路况都有很大帮助。未来将进行反复实验,对系统进行修改,使其更加完善。
参考文献:
[1]郭卜源.自动泊车决策控制系统研究[D].西安:西安科技大学,2019.
[2]郭剑鹰,周小兵,管西强.基于多视觉传感器的泊车辅助系统设计[J].传动技术,2019,33(3):34-40.
[3]胡文,谭运生,等.基于驾驶员经验的自动泊车规划算法研究[J].汽车工程,2019,41(12):1394-1400,1415.
[4]张持,张永林.基于两段圆弧的倒推式平行泊车路径规划方法[J].计算机与数字工程,2019,47(12):3035-3040.
[5]李艳红.基于嵌入式的智能寻迹泊车系统研究[J].电子元器件与信息技术,2019,3(9):87-89.
[6]漆维正.智能泊车系统的路径规划算法研究及实现[D].西安:西安电子科技大学,2019.
[7]李攀.自动泊车系统路径规划与跟踪算法研究[D].重庆:重庆理工大学,2018.
