《伺服电机端盖之工步划分》信息化教学设计探讨
2020-09-10张桂花



摘要:为主动适应智能制造产业转型升级对智能制造人才培养的需要,文章在分析学生的学习需求后确定了课程的三维教学目标和重难点,以伺服电机前端盖为任务载体驱动教学,对接企业工艺设计流程,分为提工步-辩工步-验工步三步组织教学,采用步步为赢分组PK,通过动画、头脑风暴、vericut仿真加工软件、弹幕找茬、直播系统等信息化资源和手段对课程进行信息教学设计以突出教学重点和破解教学难点。信息化教学实践表明,信息化手段的呈现降低了学习难度,有效达成教学目标,提升学生工艺设计能力,渗透智能制造的核心理念,培养高素质人才。
关键词:伺服电机端盖;工步划分;信息化教学设计
0 引言
工艺为产品之父,产品能否保持一致和完整的关键取决于工艺是否敏捷、绿色、创新、精益和高效。随着中国制造2025号角吹响,智能化悄然走进各行各业,大批机器人取代人工操作,这种产业升级对数控工艺提出新的更高的要求,迫切需要面向智能制造的即能驭智能又精工艺的人才。如何培养适应智能化生产需要的数控工艺人员,需要我们对传统的《数控加工工艺》课程进行革故鼎新的改革。
众所周知,《数控加工工艺》课程是从生产实践中总结和发展起来的科学,主要探索解决工艺过程中遇到的实际问题。而实际生产中由于不同工厂的设备生产能力、精度以及工人熟练程度等因素都大不相同,所以对于同一种产品而言,不同的工厂制定的工艺可能是不同的;甚至同一个工厂在不同的时期做的工艺也可能不同。可见,就某一产品而言,工艺并不是唯一的,而且没有好坏之分。这种不确定性和不唯一性,决定了该课程的特点就是实践性很强,因而对于没有加工经验的高职学生来说,其痛点为感觉是抽象的,难以理解的;而对于有加工经验的中高职衔接学生来说,其难点却是知其然而不知其所以然,只懂得产品如何加工,不懂得为什么要这样加工[1]。这种困扰给《数控加工工艺》课程带来的困境是“教师难教,学生难学”,教学效果欠佳。且已有的《数控加工工艺》课程信息化教学设计尚停留在嵌入加工视频和动画的多媒体课件理论教学,而教学仍为教师的单向输出[2]。基于上述原因,对课程教学全过程进行信息化教学改革显得尤为急迫,既是回应产业升级对高素质人才培养需求的需要,更是破解课程教学困境的良方,本文挑选工步划分知识点进行案例研究,以期提供信息化教学设计的普适性实现途径。
1 教学分析
一个优秀的信息化教学设计是根据教学对象和教学目标,确定合适的起点和终点。本例中通过问卷星调研分析了学习者学习需求、学习内容和学习者的特点及起点水平,并借助问卷星的统计&分析功能,真正了解学生的学习需求、心理认知特点和已有知识经验,他们对智能制造兴趣浓厚,愿意从事技术工种;善于动手实操,喜欢移动互联,乐于学习专业新技术,且已掌握机械制造工艺的基础理论和智能产线的操作能力;但工艺设计能力不足,畏难情绪普遍存在,智能制造核心理念(敏捷、绿色、创新、精益和高效)模糊。
基于以上调研分析,根据《制造业人才发展规划指南》[3]和校企合作开发的课程标准,确定本次课的教学目标如图1,界定教学内容的重点为工步划分方法、难点为如何合理划分工步、关键点为工步的定义及划分原则。聚焦工艺设计能力培养,浸润和渗透智能制造核心理念,旨在培养面向未来的智能制造工艺人员。
2 教学策略
教学策略是在教学目标确定以后,根据已定的教学任务和学生特征,有针对性地选择与组合相关的教学内容、教学组织形式、教学方法和技术,使教学效果趋于最佳的教学方案。
本例中基于上述教学目标,在教学策略上因建构主义学习理论认为,知识不是由教师传播的,而是学生自己在一定的社會环境下,基于已有知识,借助他人的帮助,主动形成新知识的认知过程,且强调学习者的学习活动必须与任务或问题相结合,以探索问题来引导和维持学习者的学习兴趣和动机,创建真实的教学环境,让学生带着真实的任务主动学习,并通过完成任务不断地获得成就感,激发求知欲望,逐步形成一个感知心智活动的良性循环[4]。所以遵循建构主义学习理论采用任务驱动法组织教学。创设真实职业情境,教学场地选择真实智能制造生产线,挑选华大电机公司伺服电机前端盖生产任务为载体,制定此零件的智能制造工艺之划分工序1车床加工的工步。教学过程对接企业工艺设计流程,并嵌入步步为赢的激励策略,创设为三步:提工步(明概念)-辩工步(思方法)-验工步(驭智造),每步均设置有疑惑,从“什么是工步?”到“工步如何划分?”再到“最佳工步能否实现?”,开启步步为赢分组PK之旅,实施沉浸式和参与式学习方法,在解惑中引导学生主动探究,合作学习、发现并解决问题,步步推进教学内容的学习,培养学生工艺设计能力,渗透智能制造的核心理念。
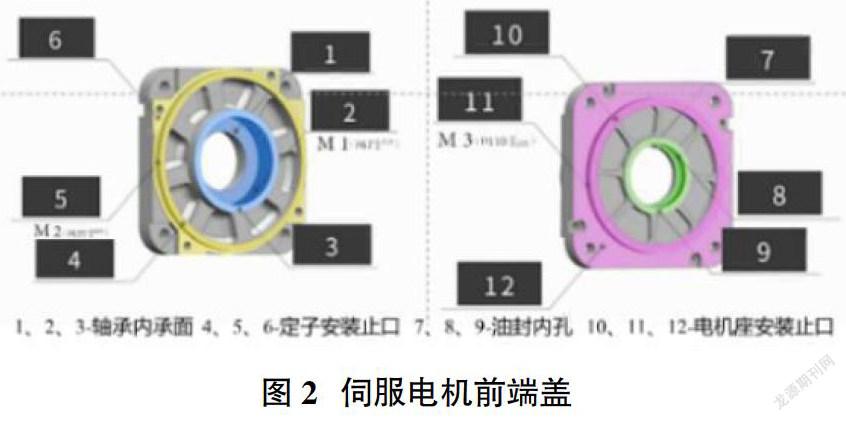
根据预设的教学重点,借助三维实体模型(如图2)形象直观的展示复杂难懂的工步加工内容,化难为易;引入三维动画直观展示工步加工过程,解决传统教学中难以用语言描述清楚的问题,化虚为实;实施头脑风暴讨论不同工步划分方法的加工精度和效率因素,聚焦教学内容,突出学习重点。
而加工工艺设计具有实践性强、知识涉及面广(工件、机床、刀具和夹具等)的特点,所以相同的工序也许因为刀具或夹具的差别而选择划分工步的方法不同,进而导致其工步内容不同。为破解如何合理划分工步的难点,本例利用vericut软件虚拟仿真工步划分,将抽象的理论知识显性化,直观展示加工路径及产品质量,化虚为实,并借助弹幕找茬引导学生根据敏捷、绿色、创新、精益、高效五大理念,确定工步划分要按照四种方法综合考虑,辩解得到最优方案,并让大家通过云数控和视频直播,在智能制造生产线上验证了工步,真实感受智能制造生产流程,突破教学难点。
除此之外,针对工艺设计能力不足,畏难情绪普遍存在,采用4F引导法[5]和小组讨论滚雪球法,让小组4个人先单独写(Fact事实、Feeling感受、Find发现、Future行动),再两两讨论相似的观点,4个人统一相似观点,最后由1人团队汇报,帮助学生克服畏难情绪,敢于开口说话,学会正确划分工序1车床加工的工步。鉴于智能制造核心理念(敏捷、绿色、创新、精益和高效)模糊,在理实一体化的教学环境下将学生按照智能制造核心理念分为敏捷、绿色、创新、精益和高效组,采用小组协作的方法开展各种教学活动,全程浸润和渗透智能制造核心理念。
3 教学过程
基于以学生为主体,教师为主导的教育理念,利用信息化资源和手段将课堂延展为课前自学、课中导学、课后提升三个阶段,激发学生学习兴趣,提高课堂实效。
3.1 课前自学
课前教师在云班发布教学活动安排和加工零件图。学生登陆云班,以小组为单位自学手机云教材课件、微课、动画,进行试题闯关,拟定工步划分方案,拍照上传云班。富有挑战的任务和丰富的学习资源点燃学生学习热情,培养学生自主学习能力。而课前测及时诊断和反馈学生自学效果,便于老师了解学情,按照学生认知规律调整教学难点和教学策略。
3.2 课中导学
课中按任务驱动法划分为任务导入-任务分析-任务实施-任务总结四大环节。
3.2.1 任务导入(5min)
任务导入的心理任务在于激发兴趣和情感,产生学习动机,把学生引进新课的学习情境中去。本例中以敏捷组分享伺服电机前端盖智能制造生产流程视频引出本次课的任务:工序1的工步划分。该视频直观展示了伺服电机前端盖的智能制造过程:分为两道工序,工序1是数控车床的加工,工序2是加工中心的加工。先是机器人夹持轴承内孔,将端盖从传送带送到数控车床上,车削加工完成后,机器人将端盖送入加工中心,加工完成后,机器人取下工件送入传送带,自动清洗和检测。高大上的机器人和自动检测元素一下子就抓住了学生的眼球,让学生沉浸在智能制造的美好未来中,产生积极的学习期待。
3.2.2 任务分析(10min)
教师分析课前学生试题闯关和工序卡的填写情况,发现学生对工步及复合工步的定义有一定的理解,但通过率只有13.3%。为进一步明晰加工任务,活跃课堂氛围,开启云课堂摇一摇,引导学生分析加工任务,并通过工艺分析动画,直观展示零件结构,引导学生正确分析工序1的加工部位及精度要求为4个加工部位(轴承内孔面、定子安装止口、油封内孔、电机座安装止口)、共计12个加工面,分左右2端,满足3个加工精度。三维动画展示,化虚为实,降低学习难度。
3.2.3 任务实施
这12个加工面的工步划分是从敏捷组和高效组的PK拉开帷幕的。敏捷组认为有12个工步,把每一个面加工作为一个工步;而高效组不同意敏捷组的方法,认为一个工步需要换一次刀,需要换12次刀,这样加工效率低下,如按一把刀具作为一个工步,可分为5个工步。这种组间PK引发的认知冲突,激发学生学习工步和复合工步定义的强烈愿望,促进对概念的理解。
任务实施按企业工艺设计流程又分为提工步(明概念)-辩工步(思方法)-验工步(驭智造)三步。
3.2.3.1 提工步明概念(15min)
工步和复合工步的定义学习是在紧张、刺激、活跃的抢答中进行的。为把握关键点,降低学习难度,教师调用动画直观展示工步和复合工步的定义及区别,点评敏捷组和高效组各自的工步划分方法,肯定前者按加工部位划分,后者按所用刀具划分。图表的直观对比可知效率由12个提升至5个工步,强烈对比、试错纠错让学生深刻理解智能制造的效率理念。
3.2.3.2 辩工步思方法(60min)
有没有更高效的方法呢?教师发起头脑风暴,小组辩论,即培养学生发散思维,同中求异,正向求反,多向辐射;又培养辩证思维,看到不利条件下的有利因素,错误结论中也可能包含某种合理成分[6]。这种思维碰撞带来新思路和新方向,绿色组按装夹次数来划分2个工步(即左端和右端),而创新组质疑掉头装夹问题,认为采用专用刀具可优化高效组方案,即去掉掉头装夹工步。
教师调用动画直观展示4个工步划分方案的加工过程,点评各自优劣;并通过VERICUT软件虚拟仿真,直观展示工步的刀具路径、刀夹具的干涉情况及加工完成后质量情况,将抽象的理论形象化,化虚为实,降低学习难度,突出教学重点;随后开启加工精度找茬游戏,个性化的弹幕分享让课堂变得更加生动有趣,精益组认为轴承内孔的加工精度难以保证,还需在创新组方案后加一个精加工(如表1),以粗精加工划分工步。
通过设疑激趣,引发学生一步一步探求解决方案的渴望,提高学习兴趣;通过质疑、试错、找茬,深刻体会工步划分应综合考虑智能制造的绿色制造、创新、精益求精、高效的理念,辩解得到最佳工步(如表1),破解教学难点。
3.2.3.3 验工步驭智造(60min)
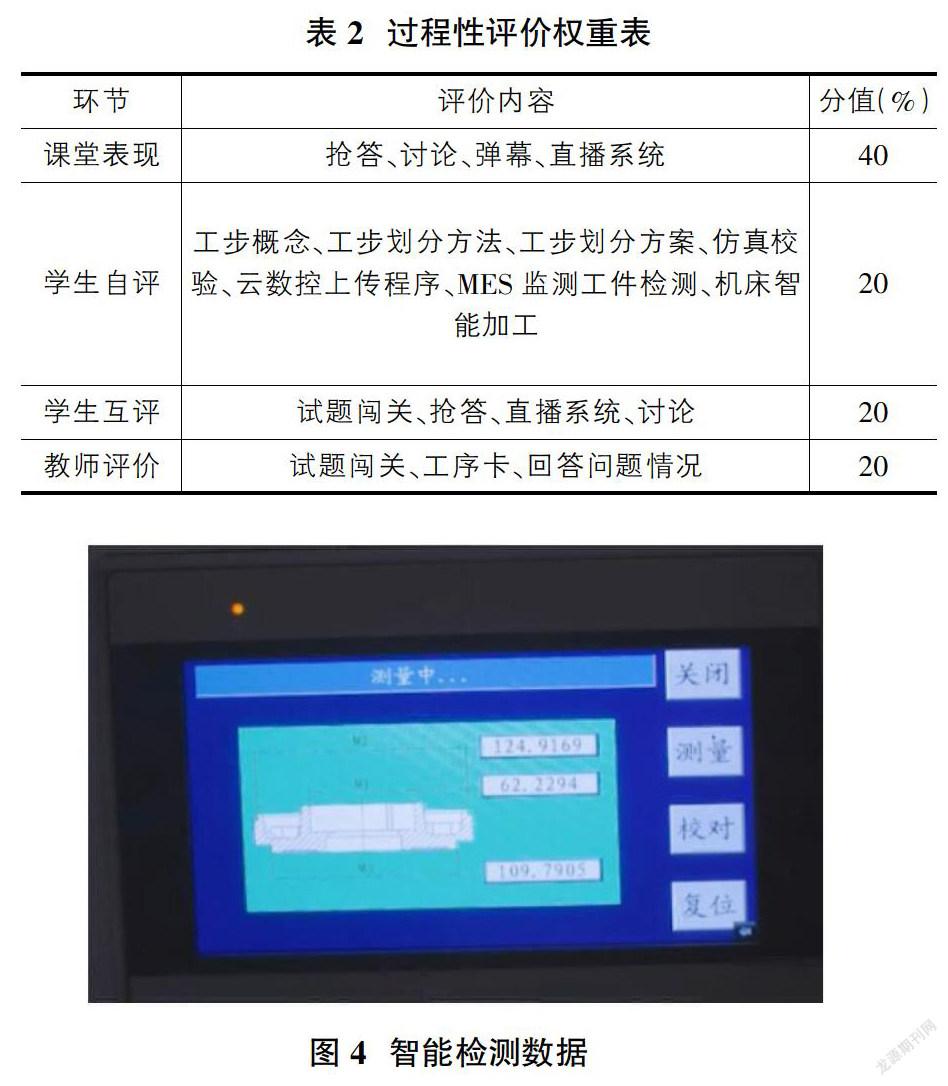
最佳工步的工件精度能否满足要求,需要到真实的智能制造生产线上加工工件予以验证。为解决实训场地设备的限制和现场教学易失秩序问题,教师开启直播系统(如图3),让学生使用云数控派发订单,将工步程序发送到车床;并进入智能产线操作机床单步加工;加工完成后,监控机器人取下零件送入智能產线,转入检测装置;监测智能检测数据(如图4)和MES系统数据,3个检测尺寸均在误差范围内,MES系统中显示“零件合格”。跟随智能制造工艺设计流程,让学生强烈体验通过直播系统、云数控、MES系统实现智能化、信息化和自动化的智能制造的“驾驭”之乐!
3.2.4 任务总结(15min)
为验证教学效果,提升学生学习成就感,学生进行试题再次闯关和最佳工步划分作业,云课堂测试结果显示试题闯关通过率达到100%,远远高于课前的13.3%,工艺卡的合理性也是100%。
为梳理和巩固知识点,把握重难点,理清知识脉络,引导学生运用思维导图整理工步划分的方法和要点,拍照上传云班。
教师利用信息化平台工具搜集数据对学生的学习效果进行评价,表彰先进,激励后进,激发学生参与课堂的积极性,注重课堂效率,提高教学质量。整合课前课中课后评分,综合课堂表现、教师评价、学生自评、互评(如表2),表现优异的被评为“智能之星”,进步最大的被评为“进步之星”。
3.3 课后提升
为巩固所学知识点和提升操作技能,要求学生课后对端盖的工序2(电机轴安装孔、定子安装孔)进行工步划分,将作业上传云班。
4 教学效果
①信息化手段降低了学习难度,课中通过学习后进行试题闯关通过率达到100%,远远高于课前的13.3%,工艺卡的合理性也是由课前的30%上升为100%,有效达成教学目标。
②通过提工步-辩工步-验工步,步步为赢,深刻体会智能制造的敏捷、绿色、创新、精益和高效的理念。
紧跟产业升级,依托柔性化智能制造产线,采用任务驱动法,以伺服电机前端盖为载体,遵循企业工艺设计流程,将教学过程创设为三步:提工步(明概念)-辩工步(思方法)-验工步(驭智造),开启步步为赢分组PK,每步均设置有疑惑,通过动画、小组讨论、弹幕找茬、vericut仿真加工、直播系统和思维导图等信息化资源和手段对课程进行信息化教学设计,使枯燥抽象的知识和技能生动直观呈现,在解惑中步步推进教学内容的学习,培养学生工艺设计能力,渗透智能制造的核心理念,培养高素质人才,开创具有可推广性的智能制造高端人才培养模式。
参考文献:
[1]连奎.对机械制造工艺学教学方法的探索[J].职业教育研究,2006(4):74.
[2]张桂花,等.《伺服电机轴的数控编程与智能化加工》信息化教学设计探讨[J].武汉交通职业学院学报,2018(3):81-86.
[3]制造业人才发展规划指南[EB/OL].[2017-02-24].http://www.miit.gov.cn/n1146290/n4388791/c5500114/content.html.
[4]徐明成.建构主义理论指导下的“任务驱动式”教学[J].郑州航空工业管理学院学报,2004(10):75-76.
[5]黄玉.4F讨论法[DB/OL].http://reviewing.co.uk/learning-cycle/index.htm.
[6]何克抗.现代教育技术与创新人才培养(下)[J].电化教育研究,2000(7):17-21.
