人眼视觉与汽车后视镜优化设计
2020-09-10顾君杰
顾君杰

摘要:后视镜是辅助车辆驾驶人员对车辆后方以及两侧运动情况进行观察的重要工具,在安全行驶中发挥着非常重要的作用。电动后视镜操作便捷,但在更换驾驶人员时长需要多次调节以生成最佳后方视野。为了方便此项操作,本文在考虑人眼视觉的条件下,提出一种汽车后视镜优化设计方案,结合定位坐标透视校正算法实现坐标校正,以达到驾驶人员眼部最佳空间位置,并为汽车后视镜角度转换提供参考与支持,相关研究内容需要引起业内人士的关注与参考。
关键词:汽车后视镜;人眼视觉;设计
0 引言
汽车后视镜优化设计可以通过引入自动调节装置的方式满足人眼视觉需求。通过对驾驶员人眼空间位置进行定位的方式,计算汽车后视镜的适宜角度,然后将调节数据发送至控制系统。在此过程中,如何达到精准匹配的数据,是业内人士高度重视的一项课题。本文即以此为研究背景,提出一种驾驶人员人眼图像定位矫正以及角度转换的算法,通过摄像头拍摄驾驶人员图像位置根据定位区域进行选择,并通过人眼识别的方式进行人眼坐标定位,可满足图像识别准确率方面的要求,以下针对考虑人眼视觉条件下的汽车后视镜优化设计方案进行分析。
1 定位区域与摄像头位置
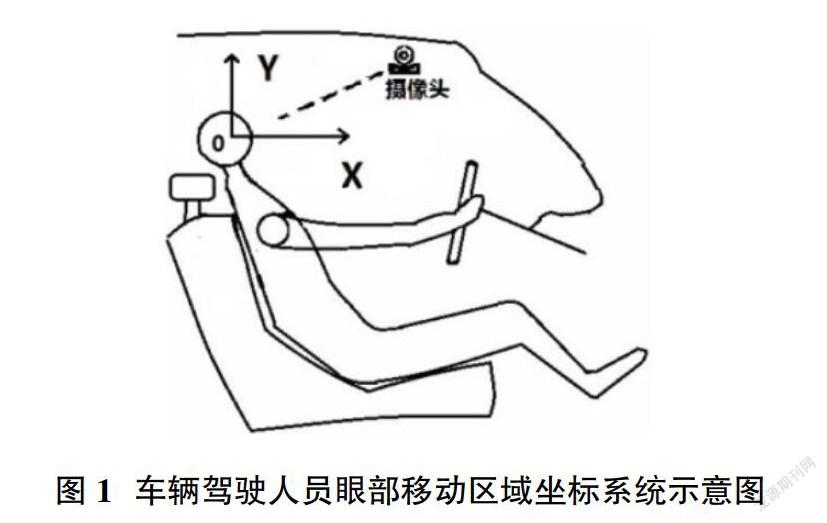
驾驶人员在驾驶汽车前需要调整至标准坐姿以确保车辆行驶的稳定与安全,驾驶人员身体需要与汽车方向盘保持对正关系,背部依靠驾驶座位且保持一定倾斜角度,以驾驶姿势舒适为标准,角度保持竖直和110°,尽可能增加人体与座位靠椅间的接触面积。正常行驶状态下,驾驶人员无需左右移动身体,通过调节座椅前后距离的方式满足驾驶需求。图1为车辆驾驶人员眼部移动区域坐标系统,在车辆内部三维空间中,眼部仅在x轴、y轴方向发生变化,形成平面内变化区域,因此驾驶人员可以通过汽车后视镜获得最佳视野的眼部中心区域可以表达为(0,ymax)以及(xmax,0)。
为降低系统硬件成本,采用单个摄像头对驾驶人员进行拍照,为确保眼部X轴以及y轴方向坐标定位的精确性,在驾驶人员前、右上方安装摄像头,与x轴,y轴均呈45°角,以最大限度控制误差。本系统选用CMOS摄像头工作模块,假定安装位置可确保采集图像中覆盖(0,ymax)以及(xmax,0)构成区域的像素数在70~100万范围内,以80万像素为例,假定采集图像覆盖区域为(0,380mm)与(400mm,0),与之对应图像像素为985×812,则X轴向单个像素代表0.41mm,y轴向单个像素代表0.46mm,定位分辨率为0.46mm,不会对驾驶人员汽车后视镜调节结果产生影响。
2 定位坐标透视校正算法
透视校正是根据所获取图像几何结构特征来定位图像需矫正区域正视面的结构特征。若单一对图像进行不同比例的缩放,则所生成图像形态无法满足透视校正的需求,还会导致原图像中大量细节信息丢失。为解决该问题,就需要通过分析透视面与正视面的方式,探讨变化所对应的映射规律,以达到定位坐标矫正处理的方式。因此,在考虑人眼视觉对汽车后视镜进行优化设计的过程中,最核心的问题就是将所给定标准采集图像所对应人眼定位区域转换为真实移动位置,通过P转换的方式,转换为有关图像像素的坐标变化问题。
在自P(x,y)转换至■的过程当中,当人眼定位区域P初始位置产生改变时,该位置变化在真实移动位置中同样有相应的改变,对该变化进行建模,形成P以及所对应的映射关系函数,即将每一个透视面I的点通过银蛇关系函数形成与之对应正视面的点,可以用■的方式进行表示。利用这种方式,可以得到对于人员定位坐标点x而言,至汽车驾驶人员移动空间位置坐标点x′的映射关系,映射后点并非原始图像中的像素点,而是在原始图像采集范围内转换映射函数所生成的新像素点坐标。对于透视面以及正视面而言,两者间的映射关系是通过数字图像中像素坐标值转换为另一离散图像坐标值的过程,在该情况下有较高的稳定性,不会受到其他因素的影响。经变换处理后,对于汽车驾驶人员而言,人眼视觉范围所定位的任意像素(x,y)而言,可以得到实际移动空间内所对应的点位(x′,y′)。一般来说,在对原目标坐标位置进行变化处理后,光栅点不处于对应区域内,源到目标的变化情况如图2所示。
结合上述分析可知,对于汽车驾驶人员图像而言,考虑人眼视觉情况下定位坐标的变化能够生成一个有效且真实的空间位置坐标,且图像连续,不会使离散像素位置映射而导致较大误差,还确保了后视镜视觉状态的有效性。基于定位坐标透视矫正算法的稳定性高,信息连续完整,效果可靠。
3 后视镜角度转换
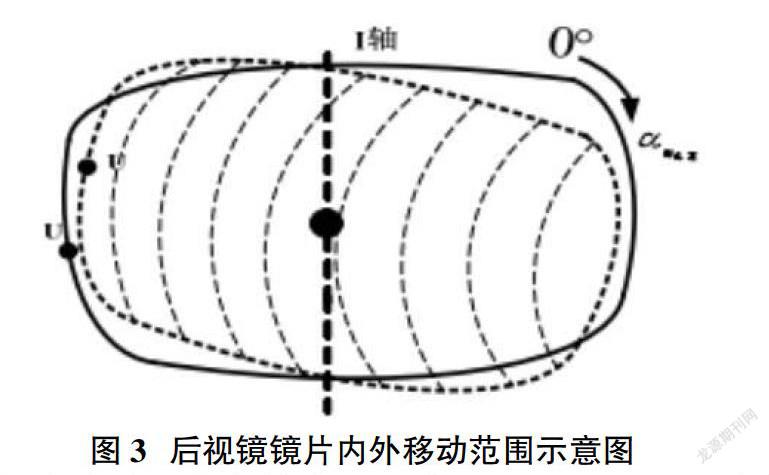
考虑到汽车左右两侧后视镜位置与车辆驾驶人员的距离有所不同,因此在人眼视觉条件影响下,对汽车后视镜的调节参数也存在一定的差异,获得坐标后视镜调节关系也有所区别,但对后视镜角度的计算方法是一致的,仅计算过程中引入系数有不同。以下对矫正后坐标与汽车后视镜角度关系进行计算,以汽车左侧后视镜驾驶人员可得到最佳车外观察视野为例。图3所示为后视镜镜片内外移动范围示意图。结合图3,在驾驶人员眼部位置沿X轴向前或向后移动时,所对应后视镜镜片应当沿i轴中心点运动,同时以后视镜左侧U点为基准做向内或向外旋转。在汽车后视镜镜片处于y=0情况下时,镜片最外极限位置为0°,向内旋转至极限角度为a,此情况下驾驶人员眼部位置向前移动距离为xmax,因此驾驶人员人眼视觉移动距离与汽车后视镜镜片调节角度存在一定的相关性关系。
假定内外调节参数为a,则有a=axmax。同时,在驾驶人员眼部沿Y轴做上、下运动时,镜片需要沿i轴中心点运动,以V点位基准进行旋转。而当后视镜镜片在对应x=0位置的情况下,后视镜镜片最上极限位置时设定为0°,极限转动角度为β,则该条件下驾驶人员眼部位置向上移动距离为ymax。定义后视镜镜片上下调节参数为b,则有β=bymax。
4 结束语
本文围绕汽车后视镜优化设计的关键问题进行分析,在考虑人眼视觉的条件下,通过对驾驶人员在车辆内移动范围的分析判断人眼定位区域,并在单摄像头方案下对拍摄所产生透视畸变进行分析,引入定位坐标透视校正算法对人眼定位坐标进行校正,算法具有良好的稳定性,信息连续完整,效果可靠,通过算法得到正确的人眼空间位置坐标,为汽车后视镜角度转换提供参考与支持。
参考文献:
[1]杨双华,何冰强.基于MFI和UG的后视镜外卡框注塑模具设计[J].工程塑料应用,2019,47(11):77-82,93.
[2]张亮,万莲,张倩,等.汽车后视镜自调节模拟系统设计[J].河南科技,2019(29):75-77.
[3]蘇秀荣,齐智国,刘建,等.汽车外后视镜抖动的试验研究[J].内蒙古工业大学学报(自然科学版),2018,37(3):201-206.
[4]高武迪,王涛,李贝贝,等.基于柔性机构的汽车后视镜调节装置的设计与分析[J].宁波工程学院学报,2019,31(4):42-47.
[5]黄波,钟铭恩,吴平东,等.基于车载视觉的驾驶员后视镜查看行为检测[J].图学学报,2018,39(3):477-484.
