轴承装盒机器人虚拟样机设计及运动仿真分析
2020-09-10王鹏,余亮,张龙
王 鹏,余 亮,张 龙
(淮南师范学院 机械与电气工程学院,淮南 232038)
0 引言
针对诸如铁、钴、镍金属材质毛坯或成品的搬运、分拣、装箱操作需求,采用工业机器人进行操作,具有灵活度好、工作效率高的特点,可提高企业自动化水平[1-2]。本文针对轴承装盒机器人,进行虚拟样机设计及仿真研究,以便后期开展运动控制、生产应用。
1 虚拟样机设计
基于运动需求和操作空间大小,设计适合于平面高速运动的重载并联机器人[3]。确定机器人驱动臂长为:大臂460,小臂250,有效从动臂840,末端执行器为电磁铁,电磁吸取方式,其虚拟样机如图1所示。

1-小臂;2-大臂;3-从动臂;4-电磁铁图1 轴承装盒机器人虚拟样机Fig.1 Virtual prototype of packing robot for bearing
2 运动学分析
2.1 运动学求解
为便于运动学求解,轴承装盒机器人可简化为图2所示的模型,为平面11杆全转动铰链机构,建立图示坐标系,坐标原点设于主动臂OA、OC汇交转动中心O,臂的转动角度度量的参考为y坐标轴,主动臂OC、OA的转角分别为θ1、θ2,动平台参考点E在坐标系下的坐标为(x,y),并已知机构结构参数:臂长OC=l1,CE=l2,角度∠ECB=θ0(l1、l2、θ0为常量)。
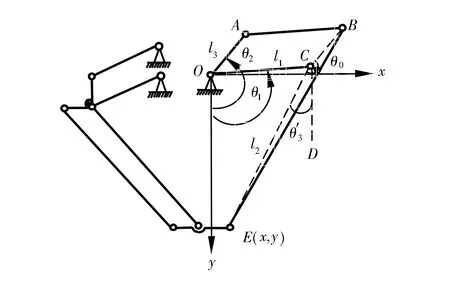
图2 机器人运动学分析模型Fig.2 Kinematic analysis model of the packing robot
运动学正解[4]为已知关节角度求末端动平台位置,过C点做平行于y坐标轴的辅助线CD,记∠ECD=θ3′,由数学关系可知θ3′=θ0-θ2,令θ3=-θ3′,则
θ3=θ2-θ0.
(1)
得到正解结果:
x=l1sinθ1+l2sinθ3.
(2)
y=l1cosθ1+l2cosθ3.
(3)
运动学逆解[4]为已知末端动平台位置求关节角度,根据机构装配形式求得逆解:
(4)
式中K=2xl1,L=2yl1,M=x2+y+l12-l22。
(5)
式中P=2xl2,Q=2yl2,R=x2+y+l22-l12,再由式(1)可方便求得θ2。
2.2 运动规划
2.2.1 轨迹规划
本设计中,为避免碰撞障碍物,首先在操作空间规划,然后转化到机器人关节空间。并联机器人轨迹规划的目标为保证速度、加速度连续,使得机器人运动平稳,振动小。参阅文献[5],修正梯形运动规律具有良好的综合性能。
2.2.2 路径规划
选择Pick-and-Place[6]抓放操作,考虑到运动过程中存在某些障碍物,运动路径为三条直线段构成的路径,每段直线的运动规律采用前述修正梯形运动规律。
3 运动学仿真
3.1 运动路径仿真
为降低风险,在虚拟环境下进行仿真可及早发现问题,避免不必要的错误发生。以起点(-200,800),路径点(-200,736)、(200,736),终点(200,800),构成在操作空间内的三条“点到点”直线段组成的路径,每段路径按前面介绍的运动轨迹在时间上进行规划,时间间隔0.01 s,再映射到关节空间,得到关节运动所需的角度数据序列。
SolidWorks Motion[7-8]运动路径仿真的步骤为:
1)通过MATLAB计算软件,获得关节角度数据序列,并按SolidWorks Motion分析要求的格式生成可交换的文本文档。
2)仿真初始时,让虚拟样机末端位置与路径规划时初始点对应一致。
3)设定驱动关节,在关节处设置“马达”,类似于实际的电机,将1)生成的可交换文本文档按顺序输入对应关节。
3.2 仿真结果分析
通过上述步骤,得到末端电磁铁的运动路径如图3所示的三段线段(仿真图中隐藏机架),达到了仿真的预期目标。驱动臂的角加速度曲线如图4所示,在时间上连续,运动平稳。
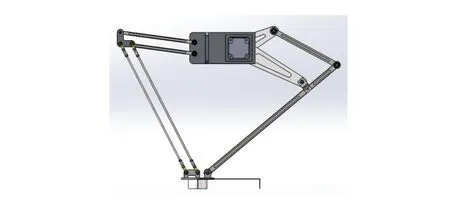
图3 末端运动路径仿真Fig.3 Simulation of the effector motion path

图4 大臂角加速度曲线Fig.4 Angular acceleration curve of the big arm
4 结语
本文在分析轴承装盒机器人工作需求的基础上,进行虚拟样机设计,得到运动学正、逆解。根据装盒操作对其运动控制的需求,选择修正梯形轨迹规划方法及进行点到点运动辅以关键点控制的路径规划,基于SolidWorks Motion平台,进行运动路径仿真,为减少调试过程的意外发生、进行实际运动控制奠定基础。
