可移动多维振动时效机器人设计与运动学分析
2020-09-04王成军窦海石
王成军, 窦海石, 严 晨
(1.深部煤矿采动响应与灾害防控国家重点实验室,淮南 232001;2.安徽理工大学机械工程学院,淮南 232001)
金属在焊接、锻造、铸造、机加工等生产过程中会产生残余应力,振动时效是消除机械产品残余应力有效方法之一[1]。相比于自然时效和热时效等处理方法,振动时效具有能耗少、见效快等优点[2]。将工业机器人应用于多维振动时效不仅能降低工人的劳动强度,还可降低生产成本、提高产品的质量[3]。近年来,振动时效机理和超谐振动成为学术界研究的热点,有力地推动了多维振动时效技术的发展并提高了振动时效带来的经济效益[4]。Vardanjani等[5]通过塑性理论解释了工件经循环载荷后残余应力减少的机理。Mohanty等[6]研究了电磁激振器对AISI 316钢板残余应力进行处理,处理后的残余应力平均强度增加到100 MPa,应力值明显得到降低。顾邦平等[7]通过高频振动能量放大装置提高了高频振动时效消除残余应力的效果。Ebrahimi等[8]研究结果表明当加载的激振频率的提高到工件固有频率的95%时,纵向残余应力降低更为明显。Vardanjani等[9]通过线性运动塑性理论解释了工件在经过循环载荷后残余应力减少的机理。杨艳慧等[10]通过实验证明了振动时效对GH4169合金残余应力消除率为10%~20%。
设计了一种3-UPU(U表示万向节,P表示移动副)并联支架,并在并联支架的基础上串联3条机械臂构成混联式多维振动时效机器人。并联支架的应用拓展了串联机械臂末端激振器的自由度和工作空间。运用D-H参数(Denavit-Hartenberg parameters)法对串联机械臂进行正运动学建模,并通过蒙特卡洛法对机械臂Ⅱ的工作空间进行分析,验证串联机械臂运动副设计的可行性。3条机械臂之间相互协同,共同完成对工件的多维激振作业。
1 机器人总体方案设计
1.1 振动时效机器人结构组成
可移动式多维振动时效机器人主要由移动底盘、并联支架、机械臂Ⅰ、机械臂Ⅱ、机械臂Ⅲ,激振器减振装置、激振器吸附固定装置等组成,如图1所示。

1为动底盘;2为转盘;3为并联支架;4为上平台;5为机械臂Ⅰ;6为机械臂Ⅱ;7为机械臂Ⅲ;8为激振控制器;9为液压泵站;10为主控制器图1 可移动多维振动时效机器人结构简图Fig.1 Structural sketch of a movable multi-dimensional vibration stress relief robot
移动底盘采用全向轮驱动,实现机器人长距离灵活稳定行走;并联支架安装在转盘上,转盘采用3排滚柱式回转支撑,可实现机器人绕垂直轴的转动;并联支架可实现上平台X轴、Y轴、Z轴方向的移动,机械臂Ⅱ、机械臂Ⅲ固定安装在上平台的顶部,机械臂Ⅰ、机械臂Ⅱ、机械臂Ⅲ的末端执行器为激振器。由于焊缝的残余应力在空间中是多维分布的,即末端执行器在空间中施加多维激振消除残余应力。当各机械臂调整到合适的姿态时,分别通过机械臂末端的电磁铁与工件吸附固连。
1.2 并联支架运动学仿真分析
可移动式多维振动时效机器人的并联支架机构原理如图2所示,并联支架的上端安装上平台,上平台所具有的运动性质会以串联的方式体现在机械臂的末端执行器上,并联支架由3-UPU支链组成。各支链分别通过万向节U与上、下两端的上平台和转盘相连接,各支链的拓扑结构为SOC{-Ri1⊥Ri2(⊥Pi3)∥Ri4⊥Ri5-}(i=1,2,3)。
运用Solidworks进行并联支架的实体建模,简化模型后导入ADAMS中修改零件名称,添加约束和驱动[11-12],添加万向节U和移动副P,并在3个移动副上添加独立的驱动,使双液压缸的3条支链分别以10、20、30 mm/s的速度移动,然后启动ADAMS/Solver进行运动学求解,确定并联支架在运动过程中上平台的运动特性,其分析结果如图3所示。
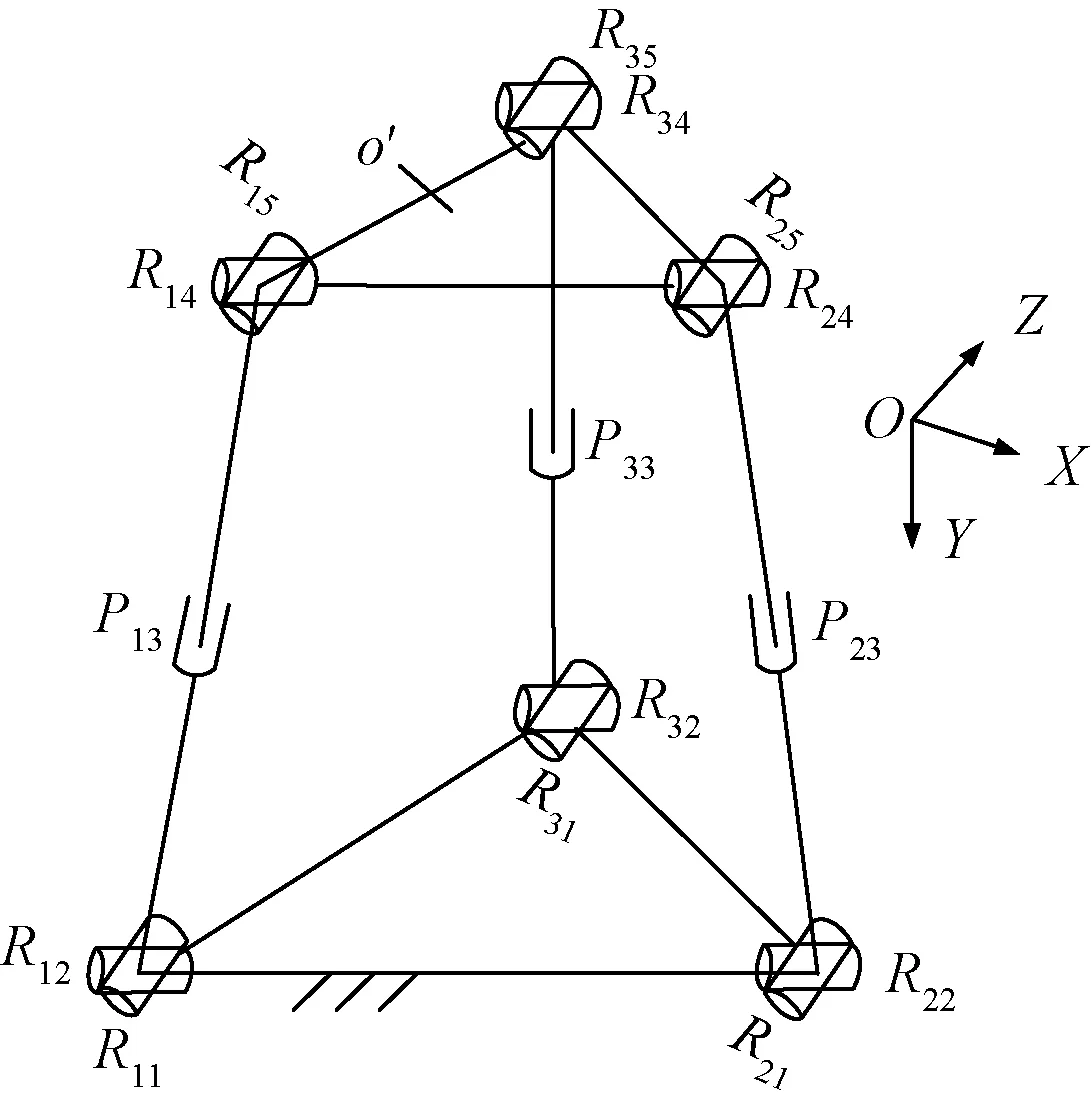
图2 并联支架机构原理图Fig.2 Parallel bracket mechanism schematic

图3 上平台速度曲线Fig.3 Velocity curve of upper platform
上平台在3条支链的驱动下做X轴、Y轴、Z轴方向的移动,上平台X轴方向的速度沿其负向增大;Y轴方向的速度沿其负向先减小、后增大最后再减小的趋势;Z轴方向的速度沿其负向减小,在3.97 s时刻速度达到0,随后速度趋于平稳的规律。虎克铰的转动只作为伴随运动。在实际的振动时效处理过程中,主要应用上平台Z轴方向的移动来调节机器人竖向的高度,从而拓展激振器的工作空间。
1.3 串联机械臂结构设计
机械臂Ⅱ固定安装在从动齿轮的端面上,减速电机输出轴上的主动齿轮与从动齿轮相啮合,将动力传至从动齿轮,实现机械臂Ⅱ绕从动齿轮的轴向轴线转动。大臂和中臂之间通过转动副连接,并用液压缸进行驱动,其结构如图4所示。

1为主动齿轮;2为从动齿轮;3为大臂液压缸;4为大臂;5为中臂;6为小臂;7为减振装置;8为吸附固定装置;9为激振器图4 机械臂Ⅱ、Ⅲ结构示意图Fig.4 Structural sketches of manipulators II and III
机械臂Ⅰ比机械臂Ⅱ和机械臂Ⅲ增加了一个在水平面上的移动副,工作时各机械臂调整到合适的姿态协同作业。机械臂的减振装置采用隔振的方式,连接激振器的底板和法兰盘之间通过4个气弹簧连接,气弹簧穿过在法兰盘上的通孔,而气弹簧与法兰盘上的通孔间隙配合,实现激振器与法兰盘的空间分离,产生隔振效果。机器人针对磁性材质进行激振,吸附固定装置是将电磁铁设置为花瓣式分布,且电磁铁与连接杆之间通过球铰链连接,使电磁铁针对弧面或平面的工件同时具有吸附固定功能。
2 串联机械臂运动学分析
运用D-H矩阵法研究机械臂末端执行器的运动轨迹,并利用MATLAB软件对机器人串联机械臂的工作空间进行分析和求解,进一步验证其设计的合理性。
对于正运动学问题,通常采用D-H法计算开链机械手的正运动学方程,一般方法为定义2个连续连杆的相对位置和方向,用左乘变换的方式表示固连在2个连杆上坐标系之间的关系,并计算它们之间的变换[13]。采用D-H法来定义连杆坐标系i。机械臂Ⅱ的连杆坐标系如图5所示。

图5 机械臂Ⅱ的连杆坐标系Fig.5 The link coordinate system of the mechanical arm Ⅱ
2.1 机械臂正运动学建模

(1)
串联机械臂正运动学方程,通过D-H法求解,根据齐次变换原理和位姿理论,得到各关节位置矩阵如下:
(2)
(3)
同理可得:
(4)

将机械臂Ⅱ各关节轴的齐次变换矩阵相乘,得到五自由度机械臂变换矩阵,即正运动学矩阵。
(5)
求解得:
px=s1d5+(-c1c2c3-c1s2s3)a3+s1d3+c1a2+a1
(6)
py=-c1d5+(-s1c2c3-s1s2s3)a3-c1d3+s1a2
(7)
pz=(-s2c3+c2s3)a3
(8)
D-H矩阵的参数中,a1、a2、a3、d3、d5分别为120、60、700、750、160 mm,各关节转角的取值范围为θ1:-180°~180°,θ2:-70°~60°,θ3:-80°~75°,θ4:-130°~125°,θ5:-135°~135°。
2.2 串联机械臂Ⅱ工作空间分析
通过蒙特卡洛法对机械臂工作的空间进行分析。蒙特卡洛法是通过随机抽样的方式求解工作空间的数值解,具体步骤如下:
(1)根据机械臂尺寸确定机器人正运动学模型中各杆长参数,根据实际运动角度确定θ1、θ2、θ3、θ4、θ5的取值范围。
(2)调用机器人机械臂正运动学方程。
(3)用随机函数rand(j)产生N个随机值,根据函数:θi=θmin+(θmax-θmin)rand(j),得到机械臂各关节角度在取值范围内的随机值。关节i=1, 2, 3, 4, 5,θmin为取值范围下限,θmax为取值范围上限。
基于机械臂正运动学的求解结果和蒙特卡洛法,样本取值为500时,得到机械臂末端工作空间点云图如图6所示,其X-Y向和Z-X向点云图如图7所示。

图6 机械臂Ⅱ三维工作空间点云图Fig.6 Three-dimensional workspace in point cloud map of Robot arm II

图7 机械臂Ⅱ二维工作空间点云图Fig.7 Robot arm II’s two-dimensional workspace in point cloud map
通过蒙特卡洛法计算得到机械臂Ⅱ的工作空间,由于机械臂各关节角度的限制,图6机械臂Ⅱ三维工作空间点云图为圆台状空心壳体,图7(a)中,俯视图工作范围为直径750~1 250 mm的圆环区域,坐标原点位于圆环圆心的左侧;图7(b)X-Z向工作空间点云图外侧轮廓为2 200 mm× 1 390 mm的桶状圆台。通过图6和图7点云图可以看出,可移动式多维振动时效机器人的机械臂Ⅱ的工作空间能适应激振器的作业需求,工作空间中点的分布较均匀。
3 结论
(1)设计了一种以3-UPU为并联支架和串联机械臂为基础的混联式多维振动时效机器人,并通过ADAMS对并联支架运动学特性进行验证,并联支架的运用拓展了末端执行器的自由度及工作空间。通过对并联支架和串联机械臂的分析,验证了机械臂末端执行器工作区间的可行性。
(2)基于D-H矩阵建立了可移动式多维振动时效机器人机械臂Ⅱ的正运动学模型,通过蒙特卡洛法在MATLAB中绘制机械臂Ⅱ的工作空间点云图,工作空间能满足激振器的作业需求,空间中点的分布较均匀,单个机械臂满足激振作业的需求。
