纱筒搬运机器人的设计
2020-09-02魏哲,焦航
魏 哲,焦 航
(西安工程大学机电工程学院,陕西 西安 710048)
0 引言
纺织企业对纱筒的需求量巨大,纱筒在络筒机上完成络筒后,主要依靠人工进行收集、转运、包装等作业,作业过程中纱筒的搬运劳动强度高、效率低[1-2]。随着机器人技术、自动控制技术的快速发展,机器人已经在越来越多的领域中广泛应用。张若青等[3]设计了AGV与机械臂相融的移动装配机器人,实现RV减速器支撑盘与针齿壳的抓取和装配,代替人工完成装配任务,装配的间隙精度为1mm。金守峰等[4]通过单目视觉系统引导机器人完成筒子纱的抓取和上纱工序,降低了工人的劳动强度。李超等[5]利用PLC为控制器,通过工业无线通讯进行远程监视,实现了智能搬运机器人在自动化线上对目标的抓取和搬运。焦玉成[6]等在码垛操作中采用PLC与工业机器人进行以太网通讯,触摸屏控制与监控,使机器人与供料系统相配合,实现了对动态物体的准确操作。张千等[7]通过构建抓取串类水果三维模型,获取高精度、多信息的抓取位姿,引导并联机器人实现了随机放置的串类水果的抓取。Silwal等[8]实现了机器人代替人工完成了对水果的采摘作业。李海等[9]采用单片机为主控芯片、双CPU串口通讯构建了智能分拣机器人,实现了对快递包裹的快速分拣。党宏社等[10]利用机器人视觉获取目标的三维位姿,引导机器人实现了对复杂纹理的平面目标的抓取。郝大孝等[11]利用欧姆龙NJ控制器与Ether CAT的总线实现对Delta机器人动态目标抓取的精准控制与操控。王鹏等[12]利用多任务分配策略实现了多机械臂对煤矸石的快速、高效分拣。乔景慧等[13]通过开发机器人视觉伺服自适应控制系统,实现了对电视机背板的检测与自适应抓取的功能。徐凤强等[14]设计了短基线定位系统定位水下作业的机器人,通过多传感器反馈信息融合来引导机器人,实现了对海产品的自主抓捕。刘汉伟等[15]提出了基于非规则物体基本形体组成的自主抓取方法,实现了非结构化环境下不同位姿、形状等物体的自主抓取,抓取精度为93.3%。章林等[16]设计了药袋自动分拣的机器人,利用Robot Control系统作为控制器,获取药袋位姿、运动速度等信息,实现对药袋的视觉追踪和高速分拣。张驰等[17]设计了用于多目标快速识别和抓取的机器人抓取系统,通过建立socket通信将工件的位姿信息传递给机械臂,引导其实现工件抓取。徐呈艺等[18]通过优化标定方程的求解,得到精确的手眼标定,实现了机器人对模板的精确抓取,抓取精度为96.2%。林强强等[19]针对零散工件的抓取,采用机器人视觉获取目标的位姿,从而引导机器人完成对随机摆放工件的准确抓取。喻群超等[20]借鉴人类的抓取机制,构建了卷积神经网络抓取框架,在Youbot机器人上实现了对目标的高准确度的抓取操作。
针对纱筒作业过程中劳动强度大、效率低的问题,本文在分析纱筒结构和搬运作业特点的基础上,设计开发纱筒搬运机器人,采用6自由度关节型机器人,设计具有双内撑式抓取机构和推纱机构的末端执行器,实现单次抓取2个筒纱,降低了工人的劳动强度,提高了纱筒搬运工作效率和纺织装备的自动化水平。
1 纱筒结构及作业分析
原纱作为纱筒生产时的原材料,将其经过络筒机卷绕在中空的纱管上,形成圆筒形或圆锥形,且具有一定卷绕密度和纤维厚度的纱筒[1]。纱管为纸质或高分子材质,内表面中空且不光滑。筒纱的质量直接影响后道纺织工序的加工生产,并最终影响纺织品的质量。
络筒机加工好的纱筒,主要通过人工搬运进行收集、转运,将其放置在包装机上或纱架上,为后续工序做准备。在纱筒搬运过程中,纱筒表面的纤维不能受到污染和破坏,纱线的卷绕密度不能降低,纱线结构不能破坏,因此要求作业过程主要受力点在中空的纱管内表面。
2 纱筒搬运机器人系统设计方案
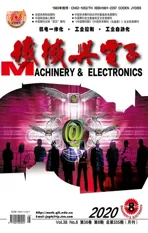
根据纱筒的结构特征及人工搬运纱筒的作业特点,在分析企业的工作环境、纱架的位置等因素的基础上,本文设计了如图1所示的纱筒搬运机器人系统。
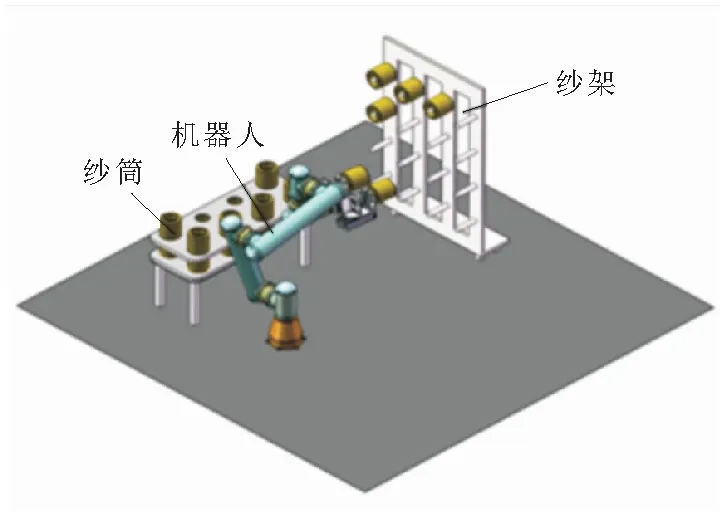
图1 纱筒搬运机器人
纱筒搬运机器人以固定工作站的形式,主要由待搬运的纱筒、机器人和纱架构成。待搬运的纱筒随机或整齐地摆放在机器人作业空间范围内,纱架为多层的空间结构,均匀安装有纱杆用于悬挂纱筒,机器人本体上安装有专用的末端执行器,可以单次抓取2个待搬运的纱筒,再按设定好的路径将纱筒放置在纱架的纱杆上,完成搬运作业。
3 机器人本体的选型
3.1 结构形式与自由度
由于纱筒是随机摆放或整齐摆放,且层高也不一致,这就需要机器人本体具有较高的灵活性和较大的活动空间[21-22]。本文的纱筒搬运机器人以固定式工作站形式进行工作,因此选用关节型机器人。自由度数关系到机器人末端执行器所能到达纱筒放置的位置,自由度的数目越多就表示机器人越灵活,为了能尽可能使机器人的作业空间覆盖到纱筒所在的任意位置,本文选取6自由度的机器人本体。
3.2 驱动方式的选用
机器人各关节处的驱动方式主要有液压驱动系统、气动驱动系统和电动驱动系统等方式[23],本文中纱筒抓取机器人的主要任务是完成对纱筒操作,而纱筒的质量为1.6~3.8 kg,负载相对来说比较小。机器人需将纱筒抓取后再放置到纱架的纱杆上,要保证有较高的精度和较大的输出力,因此机器人的驱动方式选用了电动驱动。
3.3 机器人本体的选型
根据机器人机构形式、自由度数和驱动方式等性能参数的选取,本文选用UR10人机协作机器人作为纱筒搬运机器人的本体,其性能参数如表1所示。
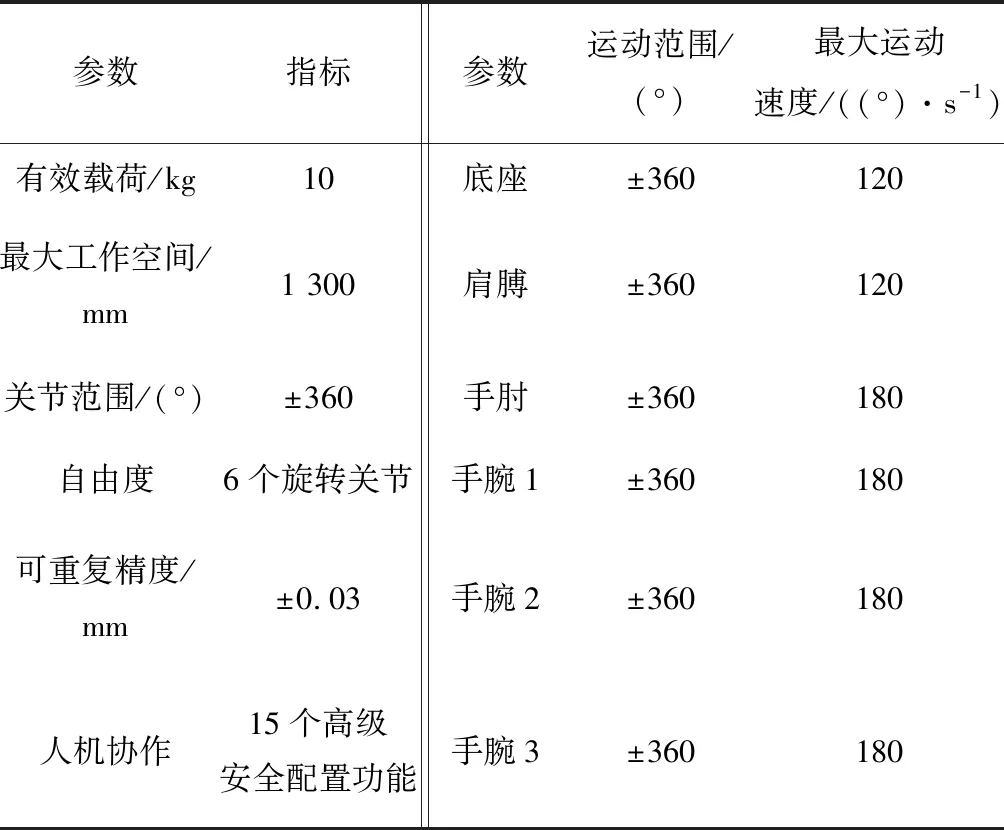
表1 机器人的性能参数指标
4 机器人末端执行器的结构设计
纱筒搬运机器人的作业过程为抓取纱筒,并将其放置在纱架上。为了提高纱筒的作业效率,本文设计了单次抓取2个筒纱的末端执行器,并采用SolidWorks进行末端执行器的结构建模。如图2所示为纱筒搬运机器人的末端执行器,主要由抓取机构、推纱机构和其他连接零件构成。
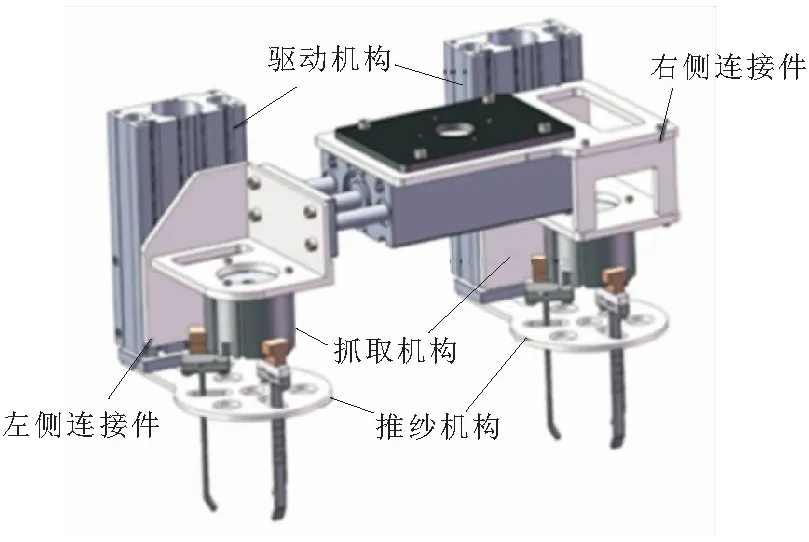
图2 末端执行器
4.1 抓取机构的设计
抓取机构为直接接触纱筒的机构,根据纱筒的结构和搬运特点,本文设计了如图3所示的平移内撑式的双抓取机构,由手指、连接件和驱动气缸构成。3个手指上部通过连接件均匀分布地安装在驱动气缸上,手指采用碳纤维材料,手指的下部与纱筒内表面接触起到支撑的作用;在气缸的驱动下连接件可以沿气缸直径方向往复移动,带动3个手指完成纱筒的内撑式抓取动作。

图3 抓取机构
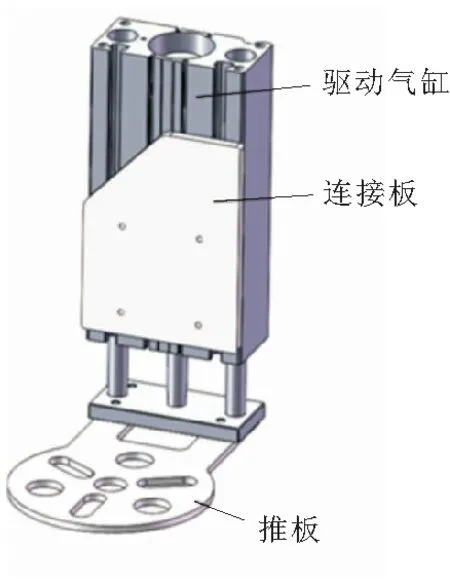
图4 推纱机构
4.2 推纱机构的设计
抓取机构将纱筒抓起来后,通过机械人的运动轨迹规划,将纱筒放置在纱架上。为了实现自动放置纱筒,本文设计了如图4所示的推纱机构,该机构由推板、驱动气缸和连接板构成。推板的中心孔与抓取机构的驱动气缸有同轴度装配精度要求,推板在图5驱动气缸的驱动下,可以上下移动,从而使纱筒从内撑式手爪上推入到纱架上。
5 实验分析
5.1 实验平台及参数设置
为了验证本文设计的纱筒搬运机器人性能的稳定性,搭建了如图5所示的实验平台,将本文设计末端执行器安装在UR10的腕关节3的位置,气动压力范围为0.4~0.6 MPa。

图5 实验平台
实验用的纱筒规格如表2所示,按2层、每层8个的规则摆放,机器人1次抓取2个纱筒。
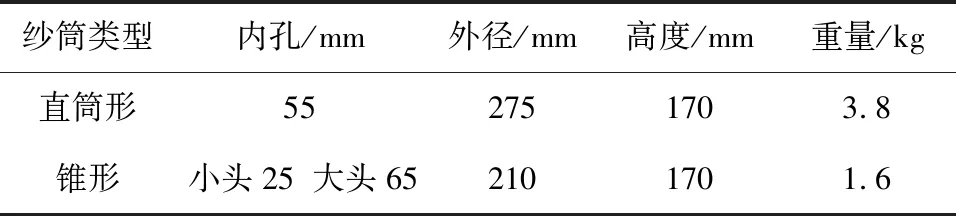
表2 纱筒规格
5.2 实验分析
实验中,纱筒搬运机器人利用示教器进行示教方式来操纵机器人运动,纱筒搬运的过程为:
a.纱筒搬运机器人在初始位置开始移动到纱筒上方。
b.机器人的肩关节和肘关节带动腕关节运动,使末端执行器的抓取机构进入到纱管中,气缸驱动末端夹持器的手爪张开,如图6a所示,完成抓取。
c.机器人的机座关节旋转,肩关节和肘关节带动腕关节运动,腕关节3旋转90°带动末端执行器由图6a所示的垂直状态旋转为图6b所示的水平状态,并向纱架运动。
d.在纱架的放置位置上,推纱机构在气缸的驱动下向外伸出,使纱筒挂到纱架上,如图6b所示,完成推纱后,机器人返回到初始位置。
e.若要连续搬运纱筒,则返回步骤a;否则,结束搬运任务。
本文对表2中的2种形状不同的纱筒进行了搬运实验,得到的实验结果如表3所示。

表3 实验结果
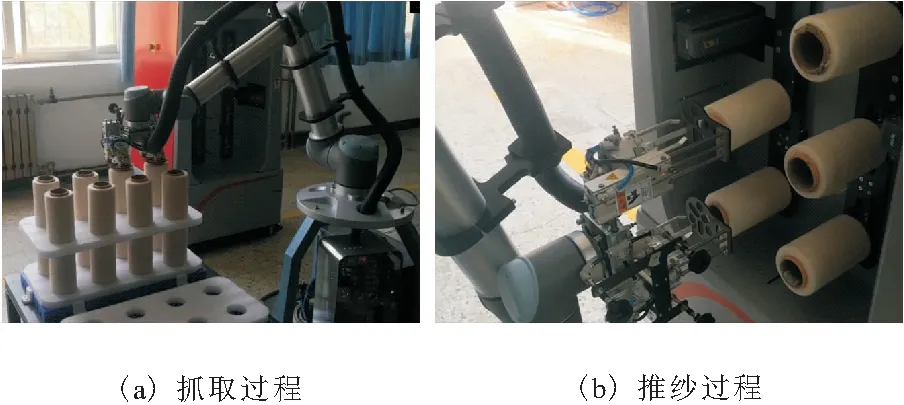
图6 纱筒搬运机器人工作状态
由表3可知,2种纱筒在搬运过程中均100%完成工作,没有出现纱筒掉落、放置错位等事故。直筒形纱筒的重量大于锥形纱筒,故单次平均耗时和总耗时上直筒形纱筒耗时较多,在机器人有效载荷的范围内,随着纱筒重量的增加,搬运速度会下降。在相同条件下,搬运机器人与2个人工相当,且是在长时间连续搬运时,机器人具有明显的优势,能够代替人工完成对纱筒的操作,效率高,性能安全稳定。
6 结束语
针对劳动密集型为主的纺织企业人工搬运纱筒的效率低、强度大等问题,在对纱筒结构和操作工艺分析的基础上,对机器人本体进行自由度、结构和驱动方式的参数选型,选用6自由度的UR10人机协作机器人作为纱筒抓取机器人的本体。为了提高纱筒搬运机器人的工作效率,设计开发了具有平移内撑式的双抓取机构和推纱机构的末端执行器,采用SolidWorks对手指、连接件、推板等关键零部件进行建模,并进行了末端执行器的装配。通过对2种不同形状的纱筒进行的搬运实验表明,该机器人可同时完成2个纱筒的抓取和推纱的工作循环,连续工作效率高,工作安全,性能稳定。