于鲁棒PCA的视觉跟踪算法
2020-08-27岳晨晨侯志强余旺盛马素刚
岳晨晨,侯志强*,余旺盛,蒲 磊,马素刚
于鲁棒PCA的视觉跟踪算法
岳晨晨1,2,侯志强1,2*,余旺盛3,蒲 磊3,马素刚1,2
1西安邮电大学计算机学院,陕西 西安 710121;2西安邮电大学陕西省网络数据分析与智能处理重点实验室,陕西 西安 710121;3空军工程大学信息与导航学院,陕西 西安 710077
目前使用颜色属性特征表征目标的几种主流算法中,均使用主成分分析法(PCA)处理颜色属性特征,而PCA方法假设输入数据中存在的噪声必须服从高斯分布,该方法存在明显不足。针对这一问题,本文根据鲁棒主成分分析法(Robust PCA)对颜色属性特征进行处理。将输入图像从原始RGB颜色空间映射至颜色属性空间,得到11种不同的颜色属性层;之后,基于Robust PCA处理颜色属性特征,使得映射后的图片信息都集中在少数层上,在保留原始图片大量信息的前提下滤除噪声。本文将使用Robust PCA处理后的颜色属性特征用于原始CN算法框架中并设置不同的降维层数对比其带来的算法性能差异。在OTB100中,与原始CN框架相比,算法成功率提升1.0%,精度提升0.9%。经实验数据证明,通过Robust PCA处理后的颜色属性特征具有更强的鲁棒性,可以更好地发挥出其优势并提升算法性能。
目标跟踪;PCA;鲁棒PCA;颜色属性

1 引 言
在目标跟踪领域,图像特征的提取方式一直是一个普遍关注的问题,不同的图像描述方式会直接影响跟踪算法的性能[1]。2010年,Blome等[2]提出MOSSE算法,其利用图像灰度信息学习一个输出平方误差和MOSSE相关滤波跟踪器,并运用傅里叶变换计算目标与待测样本集之间相关性。Henriques等[3]在MOSSE 的基础上提出了采用循环矩阵结构和核空间映射的CSK方法,但其只用到了较为简单的灰度特征。Danelljan等[4]提出了基于颜色属性的相关滤波跟踪算法,该方法是在CSK的基础上将灰度特征改为了颜色属性(color name,CN)特征。2014年,Henriques等[5]在CSK的基础上引入了核方法,并采用了HOG (histogram of oriented gradients)多维特征对目标外观进行描述[6],使得算法性能得到很大提升。上述算法采用单一特征来表征图像。Li等[7]提出SAMF算法,该算法采用CN 和 HOG 特征进行串联来表示目标,其中CN特征为未经处理的11维特征。Bertinetto等[8]提出一种特征互补的跟踪方法,使用颜色直方图与HOG特征来共同表征目标,从而提高跟踪器效果。Martin等[9]使用CN与HOG来表征目标,其中CN特征是经过PCA后得到的2维特征,该算法取得了非常优异的结果。近年来,基于深度学习的跟踪算法虽然实现了成功的应用[10-11],但其跟踪精度仍未达到令人满意的效果。Goutam等[12]发现在卷积过程中为了增强提取到的特征对目标外观变化的不变性使得空间分辨率降低,而手工特征可以弥补该不足,因此采用深度特征和手工特征共同来表征目标。
然而,目前使用CN特征来表征目标的主流算法中[3,7,9,13-14]普遍采用PCA对其进行处理。PCA方法是通过找出数据中最重要的元素和结构,使原始数据信息集中在更少的维度上且对原有的复杂数据进行降维,但该方法在处理存在严重噪声或大的离群点的输入数据时会受到限制,使集中在低维空间上的图像信息不是输入数据中最重要的信息[15]。而Robust PCA本质上也是寻找数据在低维空间上的最佳投影问题,通过将原始数据分解为一个低秩和稀疏矩阵来去除噪声。不管噪声的强弱,Robust PCA均能够从较大的且稀疏噪声污染的观测数据中恢复出本质上低秩的数据。
受这种思想的启发,本文提出使用Robust PCA对CN特征进行处理,得到经过Robust PCA处理后CN特征降维至不同层时对算法性能的影响,并与原方法进行比较。实验结果表明,使用Robust PCA处理CN特征进行处理可以更好地发挥出其优势,进一步提高算法性能。
2 相关理论
2.1 颜色属性特征
CN特征是一种基于潜在语义模型的颜色空间,包括黑色、蓝色、棕色、灰色、绿色、橘色、粉色、紫色、红色、白色、黄色11种语义颜色标签[16]。通过将输入图像从RGB空间映射到CN空间来建立观测到的颜色和本质颜色之间的映射关系,适应光照等变化造成的颜色失真,实现图像特征的鲁棒表示[17]。如图1所示。



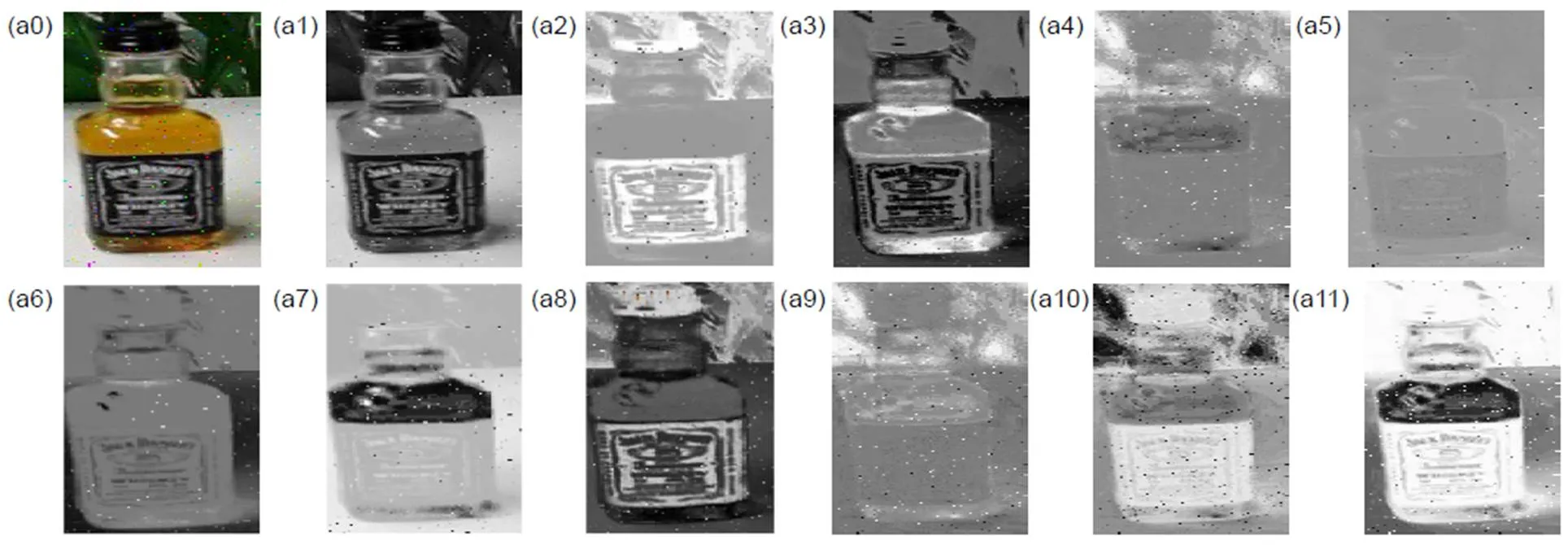
图1 原始CN分层结果。(a0) 为带椒盐噪声的原始图像;(a1) ~(a11) 原始CN特征
2.2 PCA处理颜色属性特征
文献[4]中选择使用PCA方法对CN特征进行处理,并取最后降维至2层的信息来表征目标。根据最大方差原理,选择原始数据中方差最大的方向为第一
个新坐标轴[19],与第一个坐标轴正交的平面中方差最大的为第二个新坐标轴。依次类推,从原始的空间中顺序地找组相互正交的坐标轴[20],其中大部分方差都包含在前面个坐标轴中,后面的坐标轴所含的方差几乎为0。因此,可忽略掉后面方差为0的坐标轴,以此达到降维的目的。具体操作如下:
输入特征矩阵,帧数,每一列为一个特征表示,设为。
1) 计算每一个特征的均值,进行去中心化操作:
2) 计算特征矩阵的协方差:

3) 将协方差矩阵的特征值由大到小进行排序,并计算特征向量,获得映射矩阵。对协方差矩阵进行奇异值分解(singular value decomposition,SVD):
4) 将特征矩阵转换到由个特征向量构建的新空间中:
图2为使用PCA方法对CN特征进行处理的结果。与图1相比,经过PCA处理后的图像信息基本都集中在了前几层,后面几个分层含有很少的信息,但PCA对原始数据中的噪声要求满足高斯分布。如图2所示,使用PCA处理CN特征并没有过滤掉输入图像中带有的噪声,当图像信息在前几层上时,噪声在每一层中依然存在。在非高斯分布的情况下,PCA方法得出的主元可能并不是最优的。因此,本文采用另外一种方法处理CN特征,使得处理后的特征更加鲁棒。
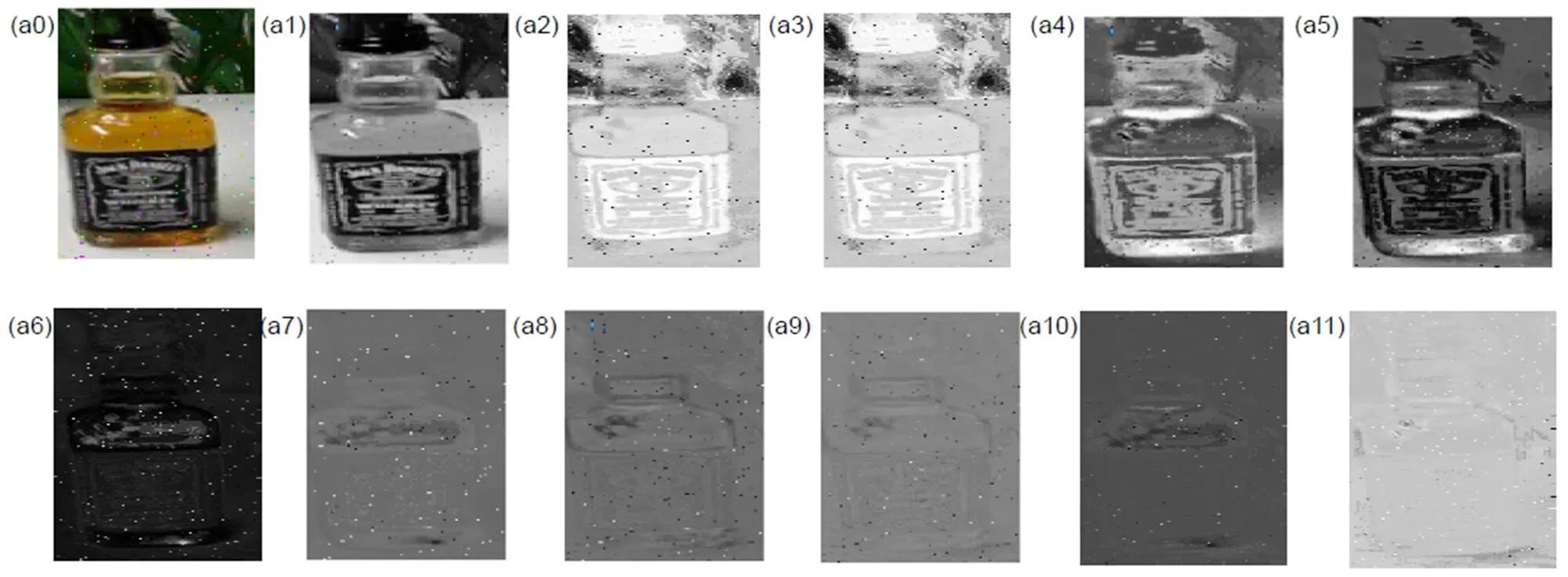
图2 PCA处理后的CN特征。(a0) 带椒盐噪声的图像;(a1)~(a11) PCA处理后的CN特征
3 本文算法
3.1 Robust PCA算法原理
与PCA问题一样,Robust PCA本质上也是寻找数据在低维空间上的最佳投影问题[21]。Robust PCA考虑对于低秩数据观测矩阵,如果其受到随机(稀疏)噪声的影响,则其低秩性就会被破坏变成满秩[22]。所以该方法是通过将输入数据分解成包含其真实结构的低秩矩阵和稀疏噪声矩阵之和,即从输入数据中恢复出未受污染的原始数据[23]。
3.2 实现细节
Robust PCA认为输入图像是由一个低秩矩阵与稀疏矩阵组成的,通过解决式(7)完全可以从恢复出想要的低秩矩阵。
其中:||×||表示一个矩阵的核范数,为从输入数据中恢复出来的有用信息,为正则化参数。操作如下:
1) 对目标函数进行SVD分解:

2) 恢复低秩矩阵:
图3为经过Robust PCA处理后的CN特征。与图2相比,可清晰看到,经过Robust PCA处理后的图片信息不仅集中在了少数的几层上,且对每一个分层都滤除掉了大量噪声。如图3(a1)和3(b1)所示,分别为经过Robust PCA处理后恢复出来的数据矩阵和噪声矩阵。因此,利用Robust PCA对CN特征进行处理可以滤除掉原始图像中大量噪声,提高图像特征的分辨性以及鲁棒性。
4 实验结果与分析
为验证本文根据Robust PCA对CN特征进行处理的效果,分别基于原始CN算法(记为Color_name tracking)和SAMF两种经典算法框架进行评估,本文所有实验均在OTB100[24]平台上进行。
4.1 基于Color_name tracking算法
算法框架简介:Color_name tracking算法使用经过PCA方法处理后的CN特征来表征目标,且实验证明降维至2层时算法性能最好。
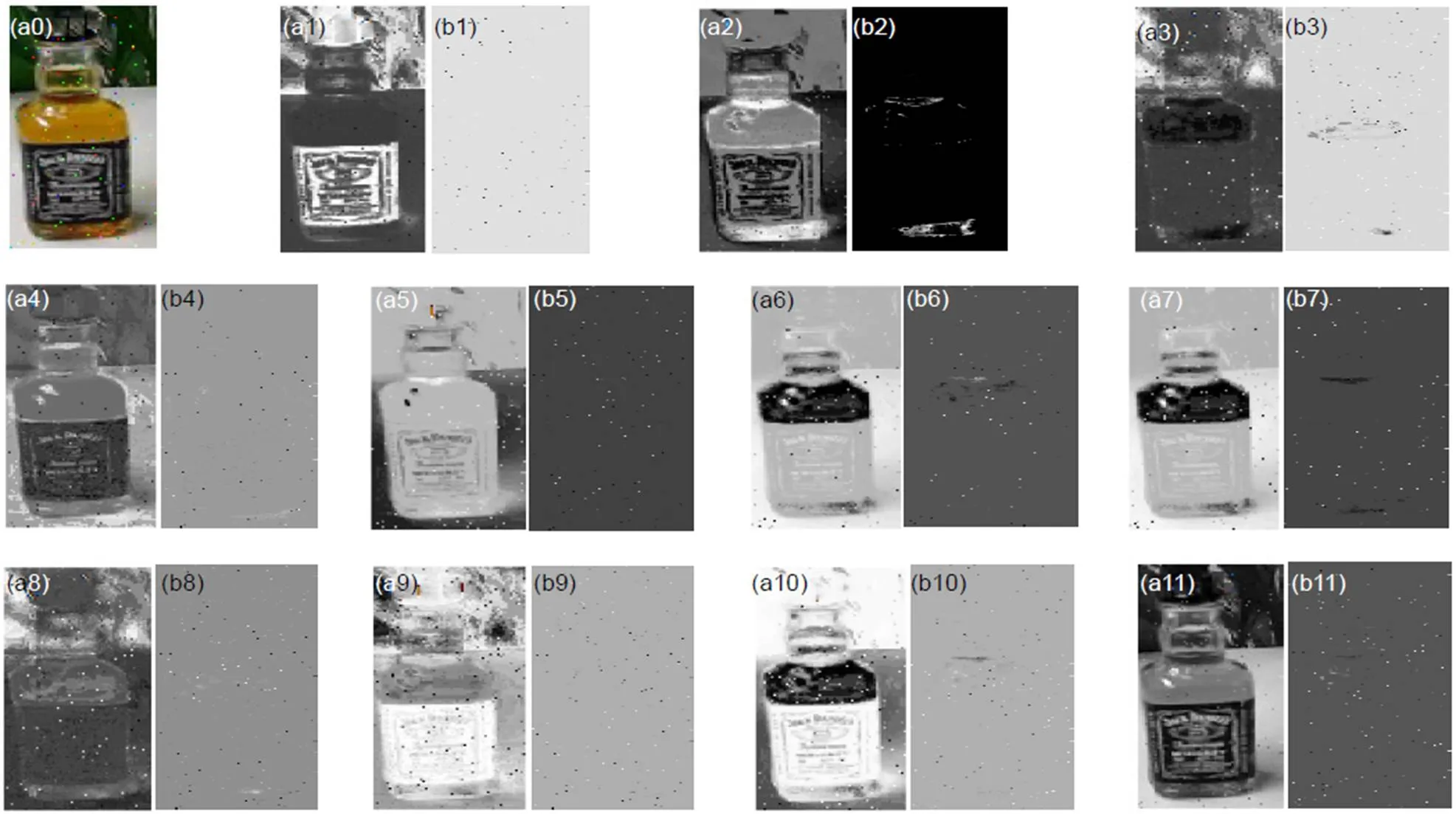
图3 Robust PCA处理的CN特征。(a0) 噪声图;(a1)~(a11) 处理后的CN特征;(b1)~(b11) 处理后的噪声
实验设计:利用Robust PCA方法对CN特征进行处理,比较使用Robust PCA对CN降维至不同层算法性能差异,且与CSK, Color_name tracking和CT[25]这3种经典算法进行比较。
1) 定性分析
图4为6组视频序列进行跟踪后的实验结果。图4(a)为Bolt视频序列,该视频难点在于存在多种相似物的干扰,在第262帧,当目标姿态发生较大变化时只有本章算法准确跟踪目标。图4(b)为Tiger1视频序列,在第226帧目标发生遮挡时,CT、CSK算法均已跟丢目标,在第296帧目标出现时,对比算法仍未跟上目标。图4(c)为Jogging-1视频序列,视频难点是目标在运动过程中存在多次遮挡。在第80帧时,当目标刚从被遮挡区域恢复出来时本文算法仍能跟上目标,但其他对比算法均跟丢目标。图4(d)为Soccer视频序列,视频难点是目标在运动中多次被遮挡、发生运动模糊且存在较多相似目标。当目标被遮挡时使用基于RPCA的视觉跟踪算法依旧可以定位到目标。在整个视频序列中,本文算法和Color_name tracking算法取得较好结果。
2) 定量分析
设置Robust PCA对CN特征进行处理分别降维至2、3、4、5层,并将其应用于Color_name tracking算法中,与原文中使用经过PCA处理的CN特征且降维至2层的算法进行比较,实验结果如表1。通过使用Robust PCA对CN降维至2层时取得性能最好,比原文中使用PCA对CN降维至2层成功率提升1.0%,精度提升0.9%。使用Robust PCA对CN降维至3、4和5层时成功率分别提升0.6%、0.3%和0.3%,精度提升0.4%,0.2%和0.1%。
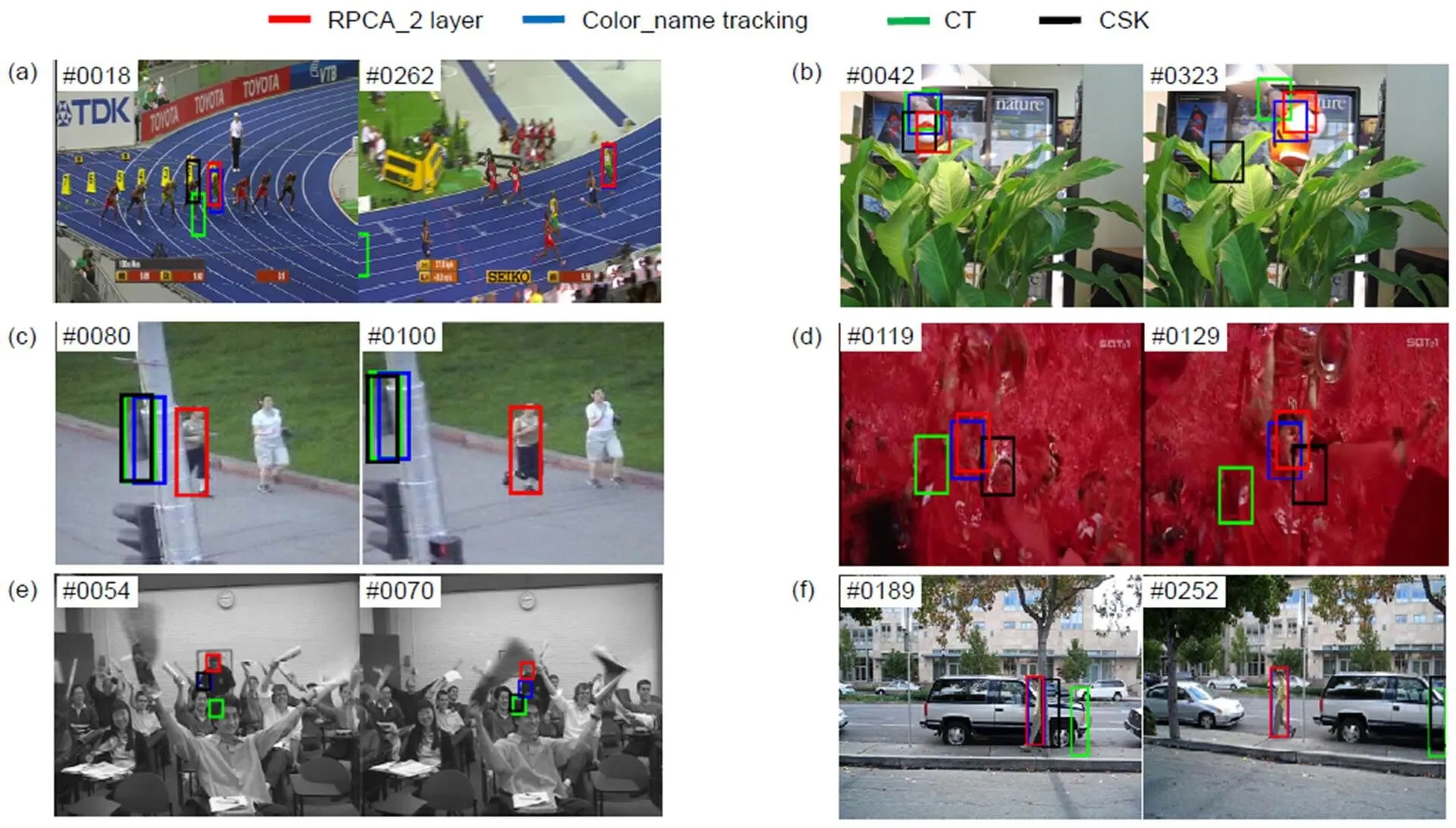
图4 视觉跟踪实验结果
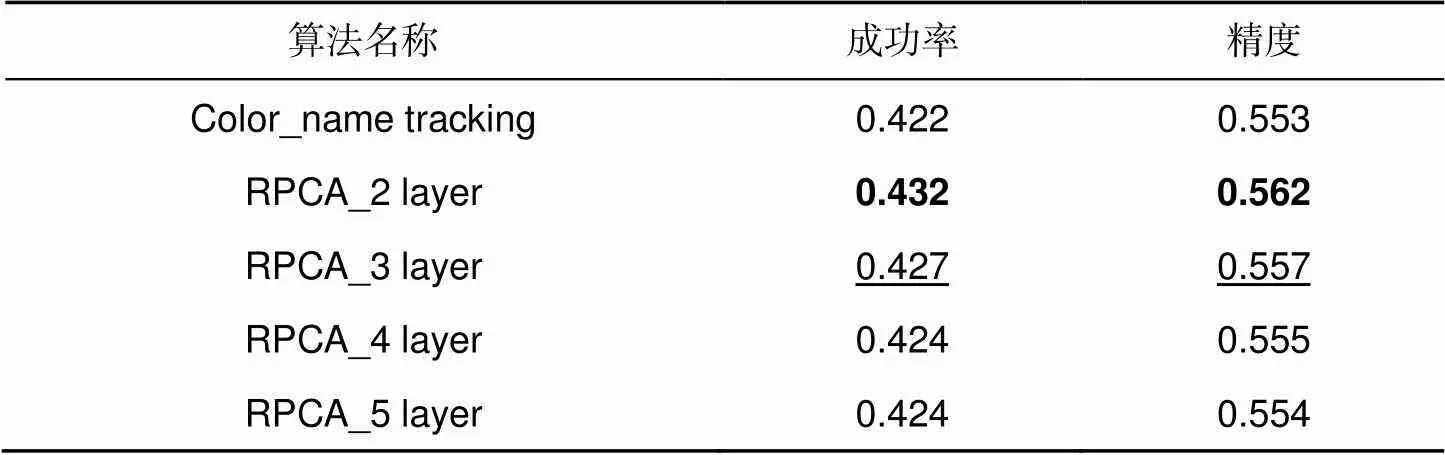
表1 Robust PCA对CN降维至不同层时算法结果比较
注:每个算法对应的最优值标为黑体,次优算法标为下划
根据表1中实验结果,本文选取了Robust PCA对CN降维至2层的算法。选用OTB100视频组对跟踪性能进行整体评判,且采用跟踪成功率和精度2个流行的度量指标进行定量分析。
图5为本文算法与其他3种经典算法在OTB100数据集上评估结果。从图5可以看出,与原始Color_name tracking算法相比,使用经过Robust PCA对CN特征处理后的特征来表征目标,使得算法在精度方面提高了0.9%,在成功率方面提高了1.0%。不论是在精度还是在成功率方面,使用经过Robust PCA处理后的CN特征表征目标比使用CN所有层都呈现出良好的跟踪性能。
图6为将使用鲁棒PCA处理后CN特征用于跟踪算法时,在具有图6(a)光照变化、图6(b)遮挡、图6(c)快速移动属性视频序列上的性能评估。
由第3节特征分析结果及上述实验结果可知,在Color_name tracking算法框架下,经过Robust PCA处理后的CN特征,并不是每一层都包括了大量的目标信息,如果不进行降维处理选择所有的CN特征来表征目标,包含少量目标信息的颜色属性分层并不会增强图形特征的鲁棒性。在表征目标时该类特征会影响特征的分辨性,降低特征鲁棒性。经过多次实验证明,使用经过Robust PCA处理后的CN特征,在Color_name tracking算法框架下在降维至2层时的效果最优,且该算法速度达92 f/s。
4.2 基于SAMF算法
算法框架简介:SAMF算法融合HOG特征和CN特征的来表征目标,其中的CN特征使用的是未经过处理的11维特征。
实验设计:在SAMF算法中利用Robust PCA方法对CN特征进行处理,比较使用Robust PCA对CN降维至不同层时算法性能差异,且与SAMF、KCF、Color_name tracking、CSK这4种经典算法进行比较。
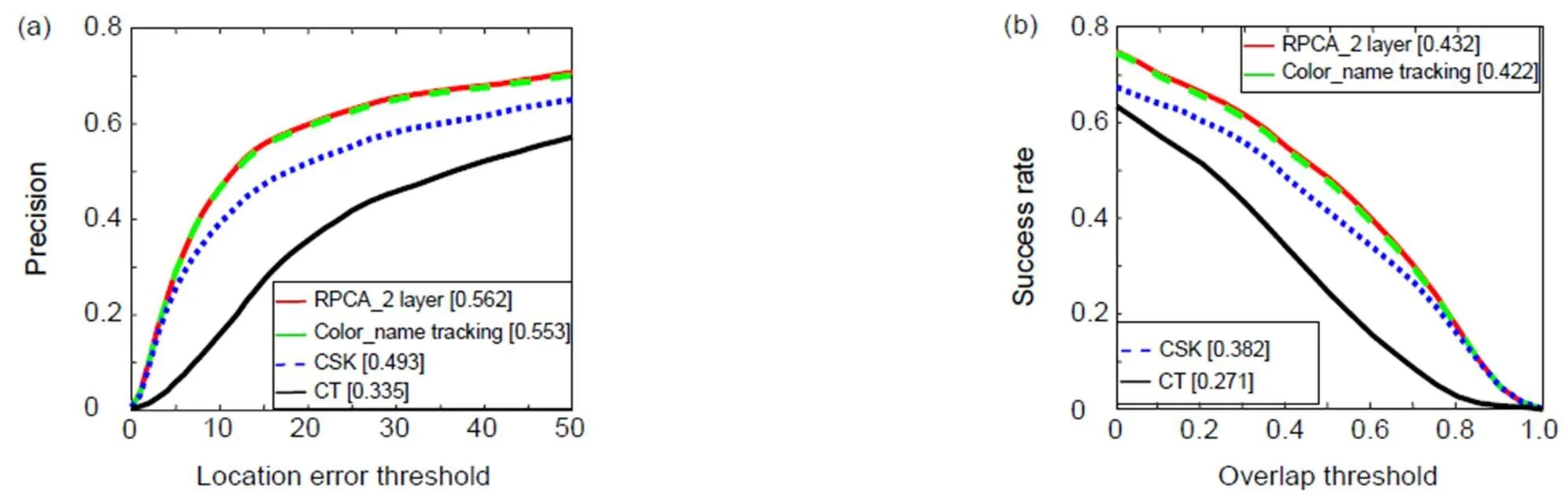
图5 精度曲线(a)和成功率曲线(b)
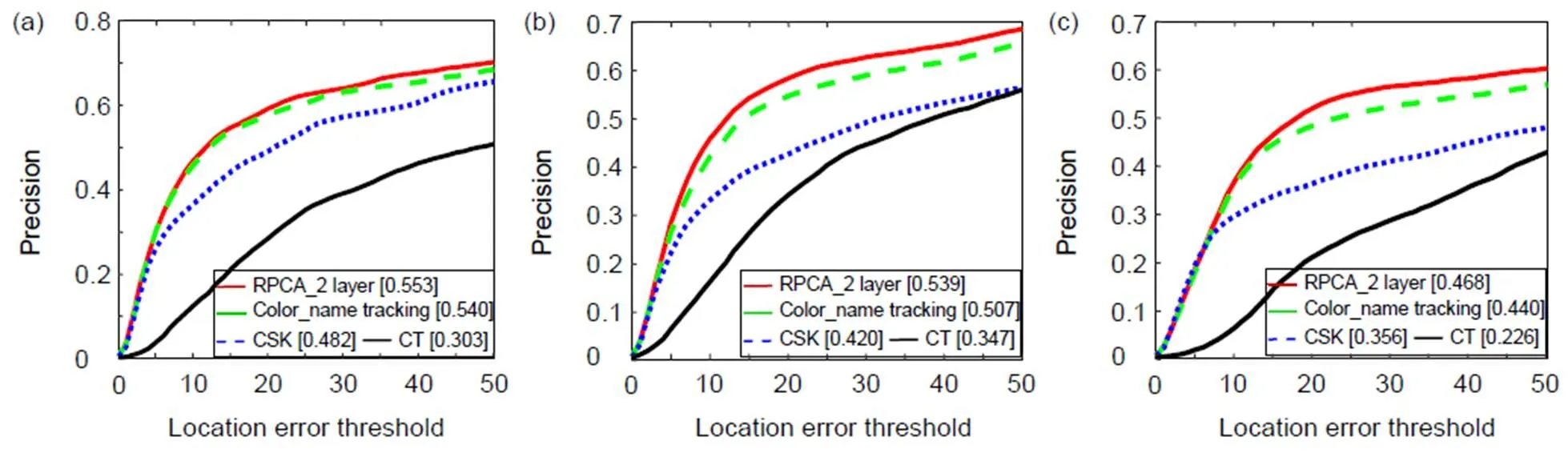
图6 基于属性的评估结果。(a) 光照变化;(b) 遮挡;(c) 快速移动
1) 定性分析
图7为6组视频序列进行跟踪后的实验结果。图7(a)为Girl视频序列,跟踪目标是一个女生,视频难点在于目标在运动过程中发生多次旋转且存在严重遮挡。经过RPCA处理后的CN特征具有很强的分辨性与鲁棒性,从图中可清晰看出,当目标发生很大旋转甚至被遮挡时,使用本章特征的算法依旧可以跟上目标。图7(b)为Jumping视频序列,跟踪目标为跳绳的人,视频难点是目标运动速度较快且发生运动模糊,但本章算法可以一直准确定位目标。图7(c)为Couple视频序列,跟踪目标为行人。视频难点在于目标存在遮挡且姿态发生较大改变。在第111帧中,只有本章算法可以准确定位目标,在第136帧,当出现相似目标干扰时,使用RPCA处理后的CN特征具有更强的分辨性。图7(d)为Freeman4视频序列,视频难点在于目标较小且在运动中出现大量相似目标且存在遮挡。在80帧目标被遮挡只暴露很小部分时,只有本章算法能准确跟踪目标,其他对比算法均已丢失目标。
2) 定量分析
设置Robust PCA对CN特征处理分别降维至2、3、4、5层,并将其应用于SAMF算法中,与原文中直接使用CN 11维特征的算法进行比较,实验结果如表2。通过使用Robust PCA对CN降维至5层时取得性能最好,比原文中使用11维CN特征成功率提升1.4%,精度提升2.1%。使用Robust PCA对CN降维至3和4层时成功率分别提升0.3%和0.5%,精度提升0.8%和0.9%。降维至2层时成功率下降0.4%,但精度提升0.2%。通过表2整个实验结果的比较,可以看出,使用Robust PCA对CN特征处理后,对跟踪精度的影响较大。
根据表2中实验结果,本文选取了Robust PCA对CN降维至5层的算法与对比算法进行比较。选用 OTB100视频组对跟踪性能进行整体评判,且采用跟踪成功率和精度2个流行的度量指标进行定量分析。
图8为本文算法与其他4种经典算法在OTB100数据集上评估结果。与原始SAMF算法相比,使用经过Robust PCA对CN特征进行处理后的特征表征目标时,算法精度提升2.1%,成功率提升1.4%。图9为将使用鲁棒PCA处理后CN特征用于SAMF算法时,在光照变化、遮挡和形变属性上的性能评估。

图7 视觉跟踪实验结果
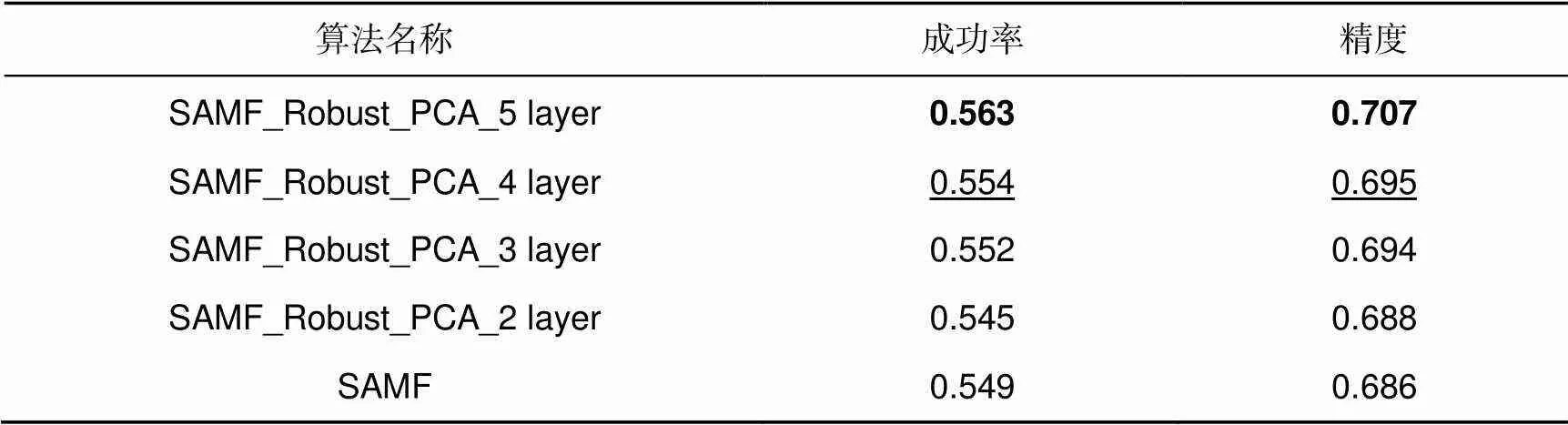
表2 Robust PCA对CN降维至不同层时算法结果比较
注:每个算法对应的最优值标为黑体,次优算法标为下划
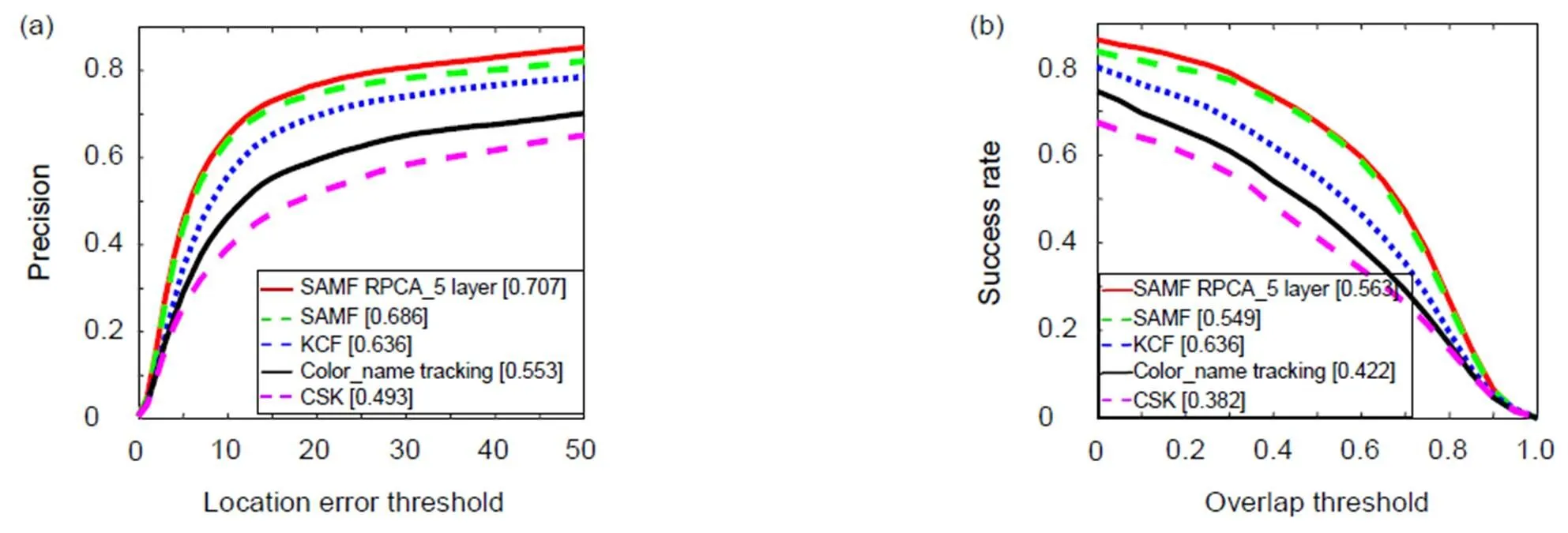
图8 本文算法与其他4种算法在OTB100数据集上评估结果。(a) 精度曲线;(b) 成功率曲线
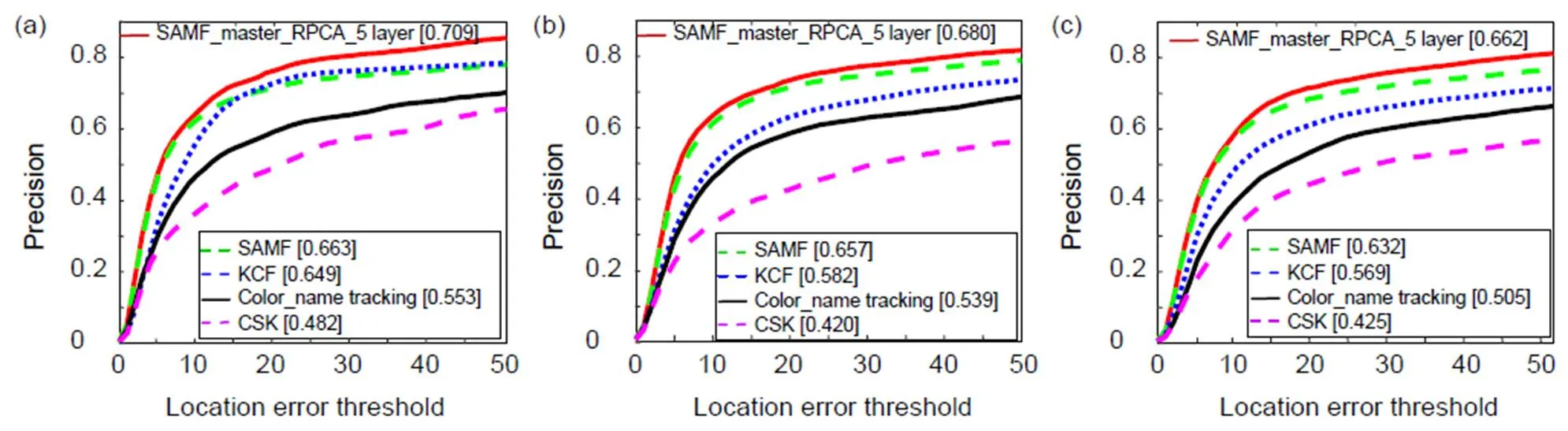
图9 基于鲁棒PCA处理后CN特征用于SAMF算法的属性评估结果。(a) 光照变化;(b) 遮挡;(c) 快速移动
在原始SAMF算法框架中,使用的是未经处理后的11层CN特征与HOG特征共同表征目标。由上述实验结果可知,在SAMF算法框架下,使用经过Robust PCA处理后的CN特征并降维至5层时与HOG特征共同表征目标带来的算法性能最优。将本文算法用于该算法框架下,更加清晰地证明了在特征层数的选择上并不是越多越好,使用经过Robust PCA处理后的CN特征将包含少量目标信息的特征层滤除掉并过滤掉图像中噪声,增强图像特征的分辨性与鲁棒性,并提高算法的性能,且该算法速度为11 f/s。
5 结 论
本文使用Robust PCA对CN特征进行处理,并将处理后的CN特征用于Color_name tracking和SAMF框架中,给出降维至不同层时算法性能比较和使用该特征的算法与原始算法的性能比较。实验结果表明,使用经过Robust PCA对CN特征进行处理带来的算法性能优于使用PCA对CN特征进行处理和未经处理的CN特征的算法性能。在横向比较中,发现在Color_name tracking框架中,使用鲁棒主成分分析法降维至2层的算法性能最优。在SAMF框架中,使用鲁棒主成分分析法对CN特征降维至5层时的效果最优。在实验过程中发现,使用鲁棒主成分分析法对CN特征进行处理时,对跟踪算法的精度影响较大。在后续工作中,我们将继续深入研究该现象背后的原理,参考文献[10]中的结论,并将其与深度特征进行融合,充分发挥手工特征的优势。
[1] Hou Z Q, Wang L P, Guo J X,. An object tracking algorithm based on color, space and texture information[J]., 2018, 45(5): 170643.
侯志强, 王利平, 郭建新, 等. 基于颜色、空间和纹理信息的目标跟踪[J]. 光电工程, 2018, 45(5): 170643.
[2] Bolme D S, Beveridge J R, Draper B A,. Visual object tracking using adaptive correlation filters[C]//, San Francisco, CA, USA, 2010.
[3] Henriques J F, Caseiro R, Martins P,. Exploiting the circulant structure of tracking-by-detection with kernels[M]//Fitzgibbon A, Lazebnik S, Perona P,–. Berlin Heidelberg: Springer, 2012.
[4] Danelljan M, Khan F S, Felsberg M,. Adaptive color attributes for real-time visual tracking[C]//, Columbus, 2014.
[5] Henriques J F, Caseiro R, Martins P,. High-speed tracking with kernelized correlation filters[J]., 2015, 37(3): 583–596.
[6] Liu X, Chen Y. Target tracking based on adaptive fusion of multi-feature[J]., 2016, 43(3): 58–65.
刘行, 陈莹. 自适应多特征融合目标跟踪[J]. 光电工程, 2016, 43(3): 58–65.
[7] Li Y, Zhu J K. A scale adaptive kernel correlation filter tracker with feature integration[C]//, Zurich, Switzerland, 2014.
[8] Bertinetto L, Valmadre J, Golodetz S,. Staple: complementary learners for real-time tracking[C]//, Las Vegas, NV, USA, 2016.
[9] Danelljan M, Bhat G, Khan F S,. ECO: efficient convolution operators for tracking[C]//, Honolulu, HI, USA, 2017: 6931–6939.
[10] Song Y B, Ma C, Gong L J,. Crest: convolutional residual learning for visual tracking[C]//, Venice, Italy, 2017: 2574–2583.
[11] Nam H, Han B. Learning multi-domain convolutional neural networks for visual tracking[C]//, Las Vegas, NV, USA, 2016: 4293–4302.
[12] Bhat G, Johnander J, Danelljan M,. Unveiling the power of deep tracking[C]//, Munich, Germany, 2018.
[13] Lukežic A, Vojir T, Cehovin Zajc L,. Discriminative correlation filter with channel and spatial reliability[C]//, Honolulu, HI, USA, 2017: 4847–4856.
[14] Danelljan M, Häger G, Khan F S,. Learning spatially regularized correlation filters for visual tracking[C]//, Santiago, Chile, 2015: 4310–4318.
[15] Abdi H, Williams L J. Principal component analysis[J].:, 2010, 2(4): 433–459.
[16] Zhang J M, Ma S G, Sclaroff S. MEEM: robust tracking via multiple experts using entropy minimization[C]//, Zurich, Switzerland, 2014.
[17] van de Weijer J, Schmid C, Verbeek J. Learning color names from real-world images[C]//, Minneapolis, MN, USA, 2007: 1–8.
[18] van de Weijer J, Schmid C, Verbeek J,. Learning color names for real-world applications[J]., 2009, 18(7): 1512–1523.
[19] Shlens J. A tutorial on principal component analysis[Z]. arXiv: 1404.1100[cs:CV], 2014.
[20] Bi D Y, Ku T, Zha Y F,. Scale-adaptive object tracking based on color names histogram[J]., 2016, 38(5): 1099–1106.
毕笃彦, 库涛, 查宇飞, 等. 基于颜色属性直方图的尺度目标跟踪算法研究[J]. 电子与信息学报, 2016, 38(5): 1099–1106.
[21] Shahid N, Perraudin N, Kalofolias V,. Fast robust PCA on graphs[J]., 2016, 10(4): 740–756.
[22] Netrapalli P, Niranjan U N, Sanghavi S,. Non-convex robust PCA[C]//, Montreal, Quebec, Canada, 2014: 1107–1115.
[23] Xu H, Caramanis C, Sanghavi S. Robust PCA via outlier pursuit[C]//, Vancouver, British Columbia, Canada, 2010: 2496–2504.
[24] Wu Y, Lim J, Yang M H. Object tracking benchmark[J]., 2015, 37(9): 1834–1848.
[25] Zhang K H, Zhang L, Yang M H. Real-time compressive tracking[C]//, Florence, Italy, 2012: 864–877.
Visual tracking algorithm based on robust PCA
Yue Chenchen1,2, Hou Zhiqiang1,2*, Yu Wangsheng3, Pu Lei3, Ma Sugang1,2
1School of Computer Science and Technology, Xi'an University of Posts and Telecommunications, Xi'an, Shaanxi 710121, China;2Shaanxi Key Laboratory of Network Data Analysis and Intelligent Processing, Xi'an University of Posts and Telecommunications, Xi'an, Shaanxi 710121, China;3Information and Navigation Institute of Air Force Engineering University, Xi'an, Shaanxi 710077, China
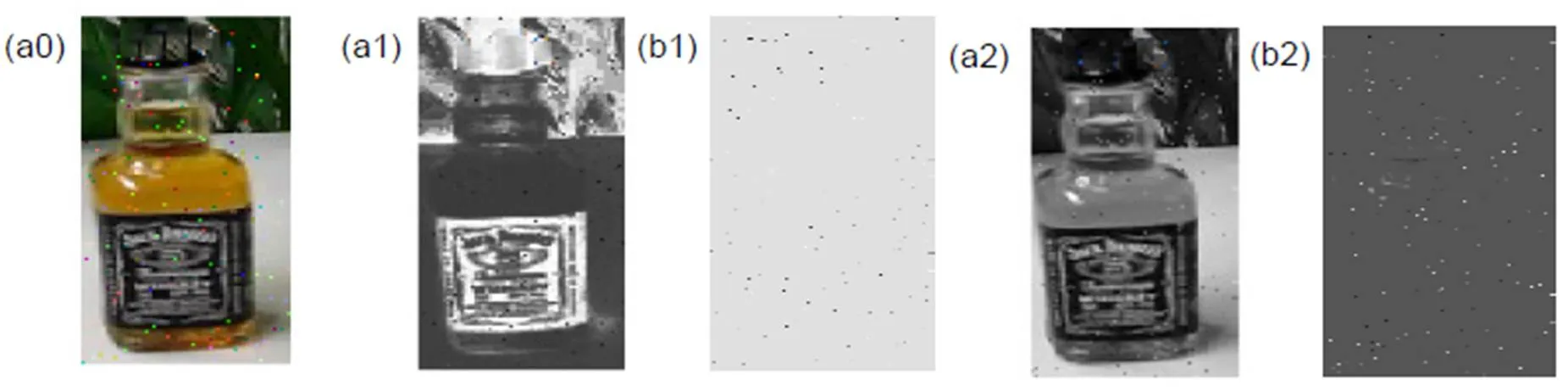
The color name feature processed by Robust PCA. (a0) Original image with salt & pepper noise; (a1)~(a2) CN features processed by Robust PCA; (b1)~(b2) The noise of processed by CN features
Overview:In the field of image processing, the way of exacting image feature has always been one of the fundamental tasks. Different image descriptions will affect the performance of tracking algorithm directly. There are so many domestic and international researchers proposed classical image features, which can be sorted as two class: 1) based on deep learning, which have gained excellent results, including VGGNet and DenseNet, but it needs a large number of data to train the model and has several restrictions on the experimental platform; 2) based on manual features, which can be took on any platform in exit and also have obtained remarkable performance in image processing, including scale-invariant feature transform (SIFT), histogram of oriented gradient (HOG), and color name (CN). So, making a profound study on manual features is crucial. At present, several mainstream algorithms using CN all adopt principal component analysis (PCA) to process the feature. However, PCA assumes that the noise of input data must obey Gaussian distribution, which is a conspicuous defect. Aim to address this problem, in this paper, we take robust principal component analysis (Robust PCA) to process CN features. The method projects the original RGB color space to a robust color space–CN space, which means that the input image is layered to 11 layers according to CN feature. Then, it processes the CN features by the Robust PCA, so that the mapped image information is concentrated on a few layers, retaining a great quantity of image information and filting out noise. The processed feature is used for Color-name tracking frame at the standard benchmark OTB100, with mainly 11 challenges (e.g., occlusion, deformation). We set up different layers to compare the performance differences of the algorithm. The experimental results show that the success rate increases by 1.0% and the accuracy increases by 0.9% at OTB100. Compared with other classical algorithms, this way shows better robust and distinguishability of feature on visual tracking in most cases. Therefore, using Robust PCA to process CN feature can be significantly applied to other image processing applications. However, this way still has shortages, such as filtering the noise of target not completely in the visual tracking process. In follow-up work, we will further optimize the feature with different ways and try our best to combine the processed feature with deep learning-features to obtain excellent features in visual tracking and to remain applicable to other image processing applications simultaneously.
Citation: Yue C C, Hou Z Q, Yu W S,Visual tracking algorithm based on robust PCA[J]., 2020, 47(7): 190278
Visual tracking algorithm based on robust PCA
Yue Chenchen1,2, Hou Zhiqiang1,2*, Yu Wangsheng3, Pu Lei3, Ma Sugang1,2
1School of Computer Science and Technology, Xi'an University of Posts and Telecommunications, Xi'an, Shaanxi 710121, China;2Shaanxi Key Laboratory of Network Data Analysis and Intelligent Processing, Xi'an University of Posts and Telecommunications, Xi'an, Shaanxi 710121, China;3Information and Navigation Institute of Air Force Engineering University, Xi'an, Shaanxi 710077, China
At present, several mainstream algorithms using color name (CN) all adopt principal component analysis (PCA) to process the feature. However, PCA assumes that the noise of input data must obey Gaussian distribution, which is a conspicuous defect. Aim to address this problem, in this paper, we take robust principal component analysis (Robust PCA) to process CN features. The method projects the original RGB color space to a robust color space–CN space, which means that the input image is stratified to 11 layers according to color name. Then, it processes the CN features by the Robust PCA, so that the mapped image information is concentrated on a few layers, retaining a great quantity of image information and filting out noise. The processed feature is used for Color-tracking frame at the standard benchmark OTB100, and we set up different layers to compare the performance differences of the algorithm. The experimental results show that the success rate increases by 1.0% and the accuracy increases by 0.9% at OTB100. The result illustrates that the Robust PCA method can better bring color name feature superiority into full play and improve the performance of the algorithm effectively.
visual tracking; PCA; robust PCA; color name
TP391.4
A
10.12086/oee.2020.190278
: Yue C C, Hou Z Q, Yu W S,. Visual tracking algorithm based on robust PCA[J]., 2020,47(7): 190278
岳晨晨,侯志强,余旺盛,等. 基于鲁棒PCA的视觉跟踪算法[J]. 光电工程,2020,47(7): 190278
Supported by National Natural Science Foundation of China (61703423, 61473309)
* E-mail: hzq@xupt.edu.cn
2019-05-27;
2019-11-21
国家自然科学基金资助项目(61703423,61473309)
岳晨晨(1996-),女,硕士研究生,主要从事计算机视觉、目标跟踪的研究。E-mail:felicitychen1023@163.com
侯志强(1973-),男,博士,教授,博士生导师,研究方向为图像处理、计算机视觉和信息融合。E-mail: hzq@xupt.edu.cn