航母作战部署的舰载机出动架次优化研究*
2020-08-22郝翎钧祝泽亚
谢 君,郝翎钧,祝泽亚
(海军工程大学兵器工程学院,武汉 430033)
0 引言
航母完成作战使命依赖于母舰平台和舰载机的协同配合。航母作战时,通常要求母舰平台在规定的时间部署到规定的地点,在母舰平台航行到目标点的航程中,又伴随着各类舰载机由母舰平台放飞去执行预警探测、情报侦察等作战任务。由于固定翼舰载机(以下简称舰载机)出动时需要母舰平台转向以获取适合舰载机起降的甲板风[1],因此,母舰平台不能沿着出发点到目标点连线这条理想路径航行,而是配合舰载机的出动和回收不断调整航向,导致实际到达点与目标点不一致。航母指挥官需要平衡航母的作战能力和部署能力,一方面最大化舰载机的出动架次以增强作战能力,另一方面最小化母舰平台到达点与目标点之间的偏差以提高部署能力。
针对上述问题,Walsh 和Rosenthal[2-4]建立了舰载机出动架次作为决策变量的整数规划模型,对部署偏差函数进行了线性近似,采用GAMS(General Algebraic Modeling System)求解该模型;周晓光[5]建立了多目标规划模型,对目标函数进行线性化处理,采用降维法将问题化为单目标线性规划进行求解;谢君[6]将舰载机出动架次作为输入变量,开发了母舰航迹计算工具。由于该问题约束条件较多且存在非线性约束,采用传统优化算法求解比较困难,因此,本文采用了遗传算法对该问题进行求解,能够迅速得出近似全局最优解,有利于航母指挥官快速制定方案。
1 问题描述
航母领受了作战部署任务,在规定的时间到达指定的作战海域。航母平台航行的理想路径是出发点到目标点的连线,为叙述方便,建立如图1 所示的平面直角坐标系,原点是航母的出发点,X 轴正方向是理想路径,Y 轴垂直于X 轴且服从右手系。
航母作为高价值军事目标,需要时刻防御可能发生的攻击,在作战部署的航程中也不例外。部署航程中,舰载机不断从航母平台上出动去执行防御任务,而航母平台则需要在舰载机起降时段内调整为逆风航向。当航母按照指定的周期[7]保障舰载机出动时,航母平台在每个周期里有规律地调整航向以配合舰载机的放飞和回收,如图1 所示。第1 阶段,母舰平台从当前航向转为逆风航向,从起点A1开始转弯到B1完成;第2 阶段,母舰平台保持航向从B1航行到C1,同时放飞当前周期的舰载机并回收之前周期出动的舰载机;第3 阶段,母舰平台转为指向目标点航向[6],从C1开始转弯到D1完成;第4 个阶段,母舰平台保持航向从D1向目标点直行,在这个周期结束时航行到A2。下一周期从A2开始,航母在部署航程中的每个周期不断重复这样的航向调整。

图1 航母部署的航行路线示意图
航母平台在第2 阶段的航程满足了舰载机起降需求,却偏离了理想路径,对按时到达目标点有重要的负面影响。作战部门因舰载机出动对第2 阶段航程有需求,而航行部门为完成部署任务对第2阶段航程有限制,航母指挥官通过确定每周期的舰载机出动架次来平衡作战需要和部署约束,实质是寻求航母部署航程中每个周期允许舰载机放飞的上限。
2 模型构建
将航母部署过程中舰载机出动架次优化问题抽象为一个规划问题,即满足母舰部署约束情况下最多能放飞多少架次的舰载机。规划的决策变量是每个周期的舰载机出动数量,目标是最大化舰载机的出动能力,约束条件是母舰平台的部署偏差约束和舰载机出动的保障及战术约束。其中,部署偏差函数根据图1 所示的原理导出,是比较复杂的非线性函数。
2.1 决策变量
表征舰载机出动能力的主要定量指标是出动架次。出动架次指的是舰载机(固定翼飞机和旋翼机)以完成任务为目的,从飞行甲板上起飞到着舰完成的一个循环过程[7]。由于舰载旋翼机的起降不需要母舰配合转向,所以,本文所说的出动架次不包括旋翼机完成的出动架次。
航母在每个周期都放飞一批舰载机。舰载机起飞后,无论在空中停留多长时间,只要还没有着舰,就属于一架次,只有舰载机着舰后,该架次才视为结束。若舰载机在空中停留一个周期,称为单周期类型,例如舰载战斗机;类似地,有双周期类型或者三周期类型舰载机,例如舰载巡逻机和舰载预警机。文献[2-5]决策变量考虑了每个周期内每种型号舰载机的3 类空中停留周期,因此,表示为3 个下标的变量。由于战术使用时,舰载机的型号与其空中停留周期间存在固定对应关系,因此,本文选取的决策变量仅需考虑每个周期内每种型号的舰载机,故表示为两个下标的变量。
2.2 目标函数

2.3 母舰平台部署偏差约束
假设和符号:
1)在整个航行过程中自然风向恒定,则相对于航母理想路径的风向也是固定的,记作θ;
2)航母在转弯段航速大小保持不变,记作V1,转弯半径固定,记作R;在第2 阶段直行保持匀速度V1;第4 阶段直行保持匀速度V1;
3)航母指定的周期记作TY;每架舰载机放飞的时间记作tl,回收的时间记作tr。


图2 第i 个周期的航母航行轨迹示意图
航母在第i 个周期的航行轨迹要素如表1 所示。
考虑到航母在Y 轴方向也存在偏差,本文调整了文献[2-5]中关于偏差函数的定义。当到达规定时刻,航母实际上位于(xd,yd),而目标点位于Z(Zx,0),当xd≥Zx,认为部署偏差为0;否则,部署偏差是当前位置到目标点的距离。航母部署偏差函数定义如下:

航母部署偏差不大于上限N_Deviation。
2.4 舰载机出动的其他线性约束
每架出动的舰载机需要在飞行甲板完成油水气电弹液补充、弹射和阻拦等保障作业,因此,受到航空保障人力、物力、空间方面等资源约束,而且舰载机的出动数量满足作战任务的要求,并受限于自身可用数量。资源和任务限制形成的线性约束如下所述。
1)出于航母航空保障资源的限制,每个周期内所有类型舰载机的放飞数量不大于上限N_Launch。
2)出于航母航空保障资源的限制,每个周期内所有放飞和回收的舰载机数量不大于上限N_Operation。
3)航空联队指挥官批准每个周期内每种舰载机的最大出动数量不大于上限N_Sortieij。
4)出于完成作战任务的需要,每个周期内每种舰载机的在空数量不小于下限N_Airborneij。
5)出于舰载机自身数量的限制,每个周期内每种舰载机的放飞和回收总数不大于该型舰载机的可用数量N_Availableij。
3 模型求解
舰载机出动架次优化模型的目标函数比较简单,但是决策变量较多,并且包含非线性约束条件,本文采用遗传算法进行求解。遗传算法是把问题的决策变量编码为染色体,再利用迭代的方式进行选择、交叉以及变异等运算来不断更新染色体信息,直到生成符合优化目标的染色体[8]。
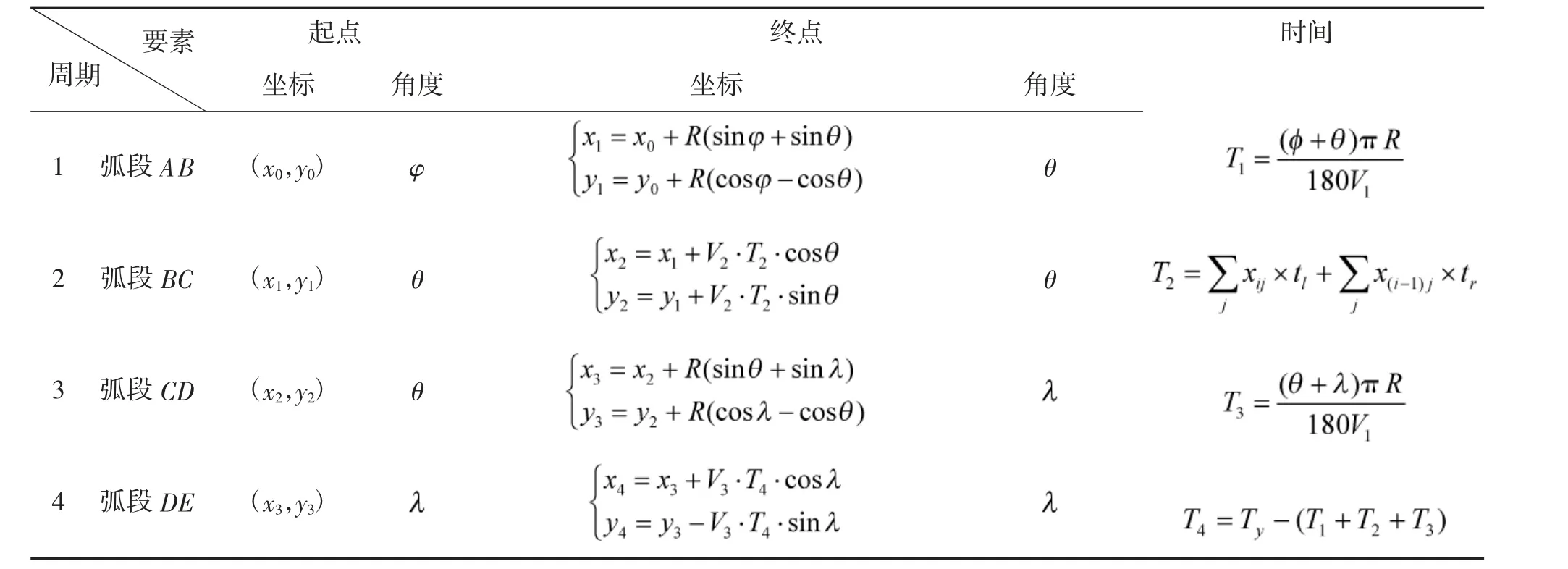
表1 第i 个周期的航母航行轨迹要素
3.1 编码
问题的决策变量是整数,且各种类型的舰载机具有数量限制,因此,编码采用十进制整数编码,在创建初始种群时就将其初始值限制在一定范围之内,从而可以保证父代染色体满足整数约束的条件,同时也满足舰载机数量限制的条件。
3.2 选择、交叉、变异操作
选择函数采用了“轮盘赌”方法,将适应度函数定义为目标函数,适应度值越高的染色体,其基因遗传给后代的概率越大;反之,遗传给后代的概率则越低。采用了“两点交叉”方式和变异操作,有利于跳出局部最优解。
3.3 约束条件的处理
对于该模型的约束条件,可采用“罚函数法”处理方式。“罚函数法”的意思是对于不满足约束的父代,从其目标函数F(x)减去一个罚函数P(x),使其适应度值减小,则其基因遗传给后代的概率大大降低。故其适应度函数调整为:

其中,目标函数F(x)即为航程中舰载机出动架次的总和,罚函数P(x)构建方法采取静态惩罚函数法,即罚函数P(x)为一个固定值,在整个优化过程中保持不变。约束条件即为母舰平台部署偏差约束和舰载机出动的其他线性约束的总和,一旦不满足其中的任意一条约束,则将其适应度函数减去一个惩罚函数。
4 仿真实例
航母接到部署任务,在一个飞行日(12 h)部署到距出发点200 n mile 处。相关参数是:θ=30°,R=0.5 n mile,V1=12 kn,V2=15 kn,V3=20 kn,TY=2 h,tl=1.5 min,tr=2 min。N_Deviation=20 n mile,N_Launch=25 架,N_Operation=40 架。有A、B、C、D、E 共5 种类型舰载机,其出动的线性约束3~5 见表2。

表2 线性约束3~5 的参数
采用遗传算法求解,初始种群个数为200,迭代次数为2 000,运行时间为53 s。得到舰载机出动架次方案如表3 所示。
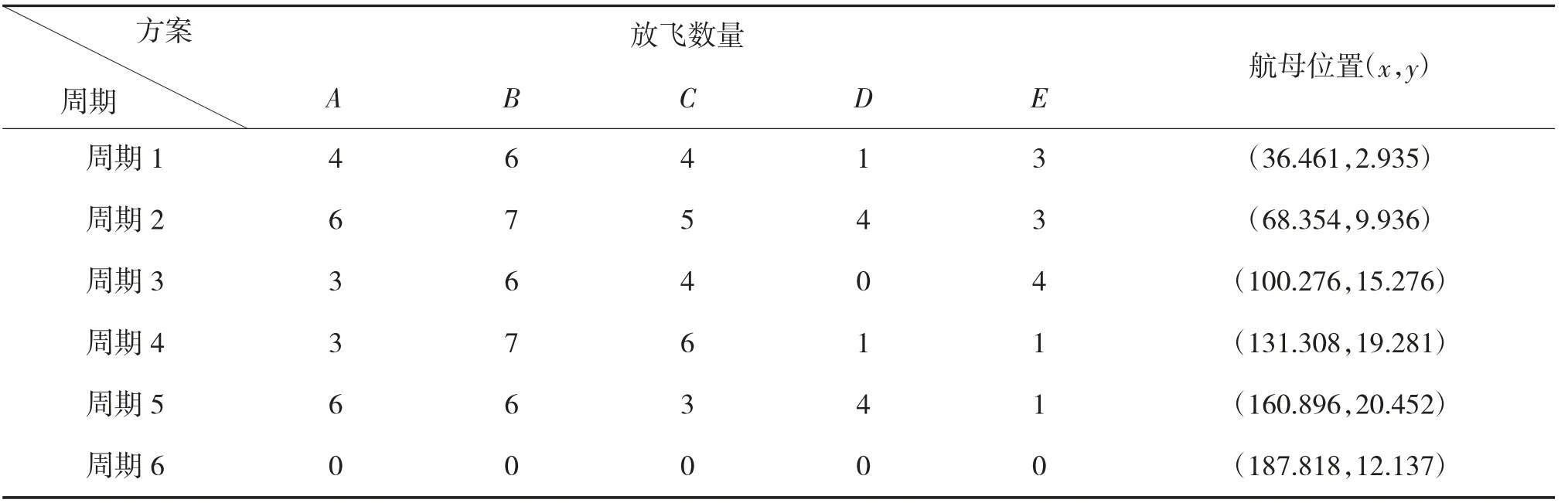
表3 舰载机出动架次方案
目标函数F(x)=98,部署偏差Δz=17.197。
5 结论
本文为航母作战部署过程中舰载机出动架次优化问题建立了非线性规划模型,将决策变量由三维简化为二维,以最大化舰载机出动架次为目标函数,以部署偏差、保障资源和作战要求为约束条件;采用了遗传算法对该模型进行了优化求解;计算结果表明,提出的模型和算法能够有效求解出航母作战部署进程中舰载机出动规划方案,具有很好的可行性。该模型若应用于航母作战任务规划软件,还需要进行工程化处理,例如采用经纬度表示出发点和目标点坐标,考虑部署航程中自然风向可变以及舰载机复飞等因素。
