传感器基点位置选取对结构动参数测试结果的影响
2020-08-18肖浩东张兴龙索博雅叶飞翔赵伟明
肖浩东,张兴龙,索博雅,叶飞翔,赵伟明
(河海大学 力学与材料学院,江苏 南京 210098)
1 引 言
结构振动的模态参数识别在航天、机械、土木和交通等领域都有相当广泛的应用[1]。在对土木和水利类工程结构进行参数(频率、振型和阻尼比等)识别时,由于体形巨大,通常需要布置大量传感器。传感器数量的增加,不仅增加了测试成本,而且增大了测试过程中的故障率。此外,大量传感器产生的海量数据,对数据传输和存储都会提出更高要求。
由于大型结构的不同位置在随机激励下产生的动态响应有一定相关性,因此在测试结构模态参数时,可根据不同结构的特点合理确定传感器的最优数目,并将其配置在结构的最佳位置,此项研究具有重要的实用价值。目前,传感器的优化布置研究在许多领域研究颇丰。马震岳[2]在水电站厂房振动特性测试中,基于ANSYS模拟结果采用识别误差最小准则研究了传感器的优化布置;王山山[3]采用电磁振动台产生有限带宽白噪声激励模拟环境激励,研究了传感器的布置位置对悬臂梁结构动特性识别的影响;黄民水[4]根据传感器的可选位置对MAC矩阵的贡献大小,研究了桥梁结构模态参数测试中传感器的优化布置;刘中生[5]根据目标模态的预估数据研究了测量点和激振点的布置对目标模态准确性识别的影响。
以上研究都是对一次性布置传感器的优化,对分批次测试传感器的布置研究还鲜有见到。本文将采用分批次测试的方法,研究基点位置的选择对随机激励下悬臂梁结构模态参数识别的影响。
2 理论依据
对于多自由度阻尼系统,系统振动的动力学方程为:

(1)
对式(1)进行Laplace变换可得:
(2)
H(s)称为系统传递函数。如果令s=jω,上述变换则变为傅里叶变换,传递函数H(s)变为频响函数。对于一个实模态系统,频响函数可表示为下式:
(3)

结构上任意一点的动态位移响应,可以该结构某一点激励力和频响函数表示。对于可看作白噪声的环境激励,其各频率下具有均匀分布的能量,即功率谱密度函数在所有的频率范围内是近似的均匀分布,结构上各处的输入为常量,则结构的响应和结构系统的总频响函数等价。
选择结构的某一个点作为振动基点,建立响应点与参考点之间的传递率来识别结构系统的模态振型,响应点与基点之间的传递率可表示为:
(4)
可以将序列αi(ω)近似地看作系统的模态振型,假定结构的各阶模态振型正交,则在第r阶固有频率处的系统响应就以第r阶模态的振动为主,将式(3)代入式(4)得:
(5)
上式中,当p作为参考点是固定时,固有频率ωr处,振型φpr是一个定值,因此结构在频率ωr处的模态振型可以直接通过传递率曲线αi(ω)得到。各测点传递率在固有频率处的幅值大小确定该点在振型向量上的大小,互功率谱在该处的相位确定该点在振型向量上的方向。
3 试验方法
试验模型采用钢质悬臂梁,梁长为1200mm,截面宽和高均为12mm,弹性模量取206GPa,密度取7850kg/m3。为与试验结果进行对比,首先采用ABAQUS有限元软件对该结构进行自振特性分析,得该悬臂梁前4阶频率分别为11.44Hz、71.05Hz、197.53Hz和384.86Hz。
为测试方便,在悬臂梁上设7个节点,节点之间的间距为20mm。测点布置如图1所示,其中,C1号点为悬臂梁顶部自由端,C7号点为悬臂梁固定端。试验采用DY-300-2电动振动系统产生的随机激励模拟有限带宽白噪声振动,激励的功率谱密度取0.1(m/s2)2/Hz,激振频率带宽为5Hz~

图1 悬臂梁结构模型及测点布置
500Hz。试验的测振设备采用PDV-100激光测振系统,该系统不会对测试结构产生额外的附加质量,其可为振动测量提供一种更精准的测量方式,从而降低研究过程中的误差。
对悬臂梁上的7个测点,分别以各测点为基点、以其余的测点为响应点进行7批次测量。测量使用两台激光测振仪,一号激光测振仪将激光对至基点位置,二号激光测振仪对至响应测点位置进行测量。由试验模态分析方法获得试验结果,同前述有限元计算结果进行对比分析。试验现场悬臂梁结构模型及测点布置如图1所示。
4 数据分析
数据采集由DH5920型多通道并行数据采集与分析系统完成,数据采集时间均为5min。以C1为参考点测得的典型测点实测时程如图2所示。

图2 测点C1典型时程图
利用模态分析软件对以上测得的悬臂梁随机激励下的响应信号进行模态参数识别,具体步骤如下:
(1)构建模型,并对悬臂梁模型按照测试布置测点。
(2)对悬臂梁节点赋值:建立数据文件,导入数据后,将采集的响应数据和对应的悬臂梁测点进行匹配,设置分批次测量的不动点作为测试参考点,并设定振动方向为x方向。
(3)进行功率谱分析:对测点数据进行自功率谱和互功率谱计算,由于模态测试中每个测点的数据采集时间为300s,采样频率1000Hz,故总共约300000点数据。考虑到计算精度和实际频谱曲线的可观性,傅里叶变换的数据块大小取1024点,对数据加海明窗处理。为能够在保障足够高频率分辨率的同时,增加平均次数来降低方差,并且充分利用段的开始和结束部分数据,提高谱估计精度。谱分析中采用重叠处理和平均处理技术,重叠率设置为50%,平均处理方式选择线性平均化处理。
(4)选取峰值点:第3步计算完成后,根据功率谱上的峰值来确定悬臂梁的各阶自振频率。由于在实验室中采集的信号受噪声干扰很小,信号的信噪比较高,基本上功率谱曲线的峰值点都在同一个频率点。因此,本文仅给出以C1为基点(参考点)时各测点自功率谱幅值瀑布图,如图3所示。从图中可以看出,C1(M#1)测点对前4阶频率响应都比较明显;C2(M#2)对第1阶频率和第4阶频率响应明显;C3(M#3)对第1阶频率和第3阶频率响应明显;C4(M#4)对第2阶频率和第4阶频率响应明显;C5(M#5)对第2阶频率和第3阶频率响应明显;C6(M#6)对第3阶频率和第4阶频率响应明显;由于C7(M#7)为固定端,对前4阶频率响应均不明显。以上各测点对前4阶频率的响应也可通过振型图(如图4所示)得到。
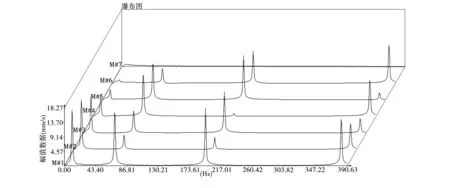
图3 以C1为基点测得悬臂梁各测点自功率谱幅值瀑布图
(5)确定模态参数:根据功率谱分析图可以确定悬臂梁的前4阶模态参数,结果如表1所示,悬臂梁的前4阶振型如图4所示。对比不同基点悬臂梁随机激励测试的识别结果和数值计算结果,可以发现,除以C7为基点外,其他情况下频率和振型的结果吻合得均较好。由图3和图4可知,C4测点距离第3阶振型节点最近,但以其为基点进行模态参数识别时,识别结果依然很好。这说明,在模态参数识别的过程中,只要不布置在不能反映结构振动的不动点上,模态识别结果都可以接受。
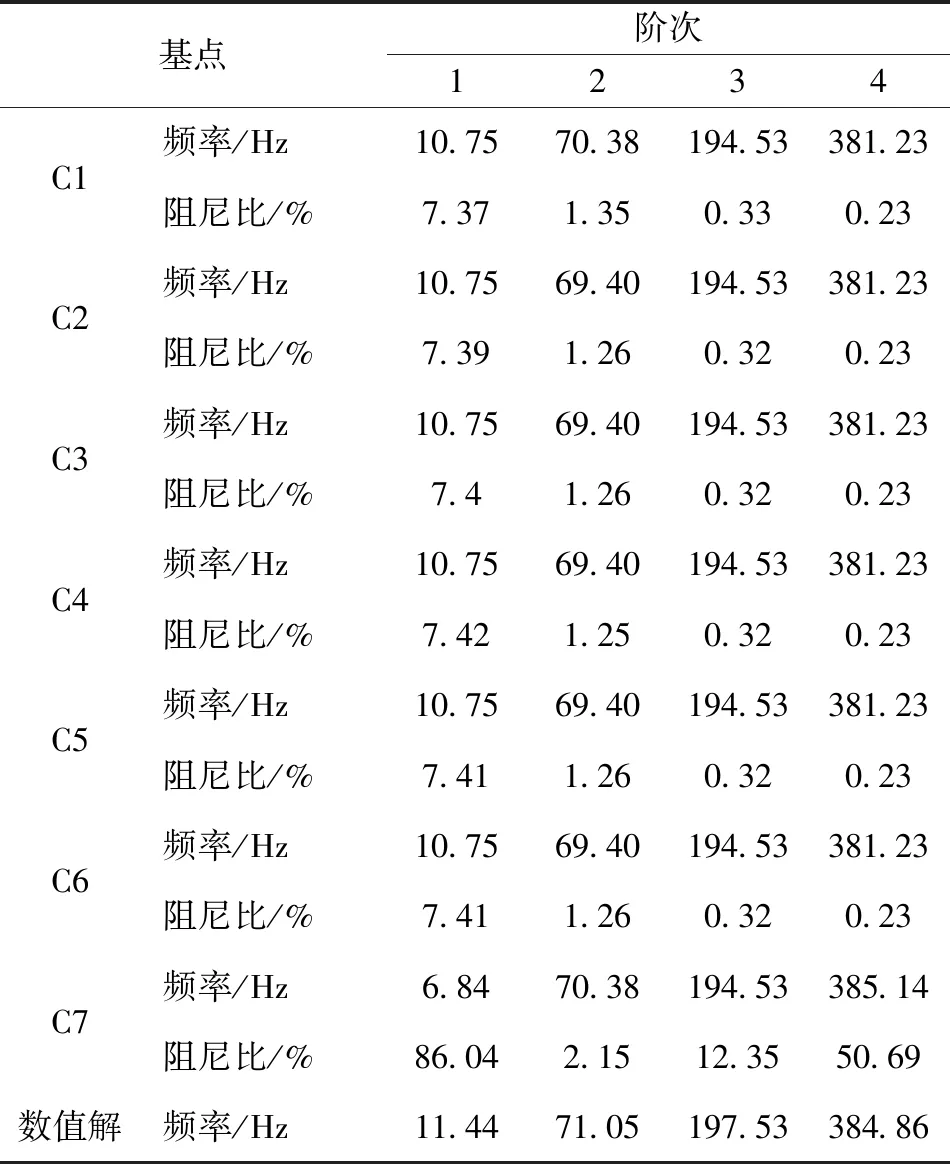
表1 不同基点悬臂梁模态参数识别结果

图4 悬臂梁C1为基点的实测振型图
5 结 论
从以上试验结果可见,使用环境激励法进行结构的模态参数识别,当采用分批次测试时,传感器基点(参考点)位置布置在不能反映结构自振特性的不动点或固定端时,对参数识别的结果影响较大;其他位置对试验结果影响不大。对于试验中所研究的悬臂梁结构,基点位置的变化对结构自振频率和振型的影响小,而阻尼比对传感器位置的布置比较敏感,可通过传感器的优化布置提高测试结构动力特性测试的精度。参考点应避开刚体位移相对较大的位置,还应避开处在要研究的阶次振型的节点处。
