洋山深水港区航道水下地形监测与跟踪分析
2020-08-17周秘
周 秘
(中船勘察设计研究院有限公司,上海 200063)
0 引言
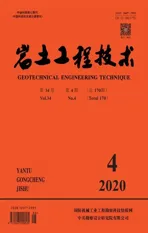
洋山深水港区位于杭州湾口、长江口外的浙江省嵊泗崎岖列岛,由大、小洋山等数十个岛屿组成,是中国首个在海岛建设的港口(见图1)。洋山港西北距上海市南汇芦潮港约32 km,南至宁波北仑港约90 km,向东经黄泽洋水道直通外海,距国际航线仅45海里,是距上海最近的深水良港[1-3]。为掌握水深状况,确保航行安全,对洋山深水港区进港航道人工维护段和港内水域进行定期的水下地形监测与跟踪分析,全面掌握航道现状、水深变化趋势及河床变化趋势等,为疏浚提供初步的参考依据。
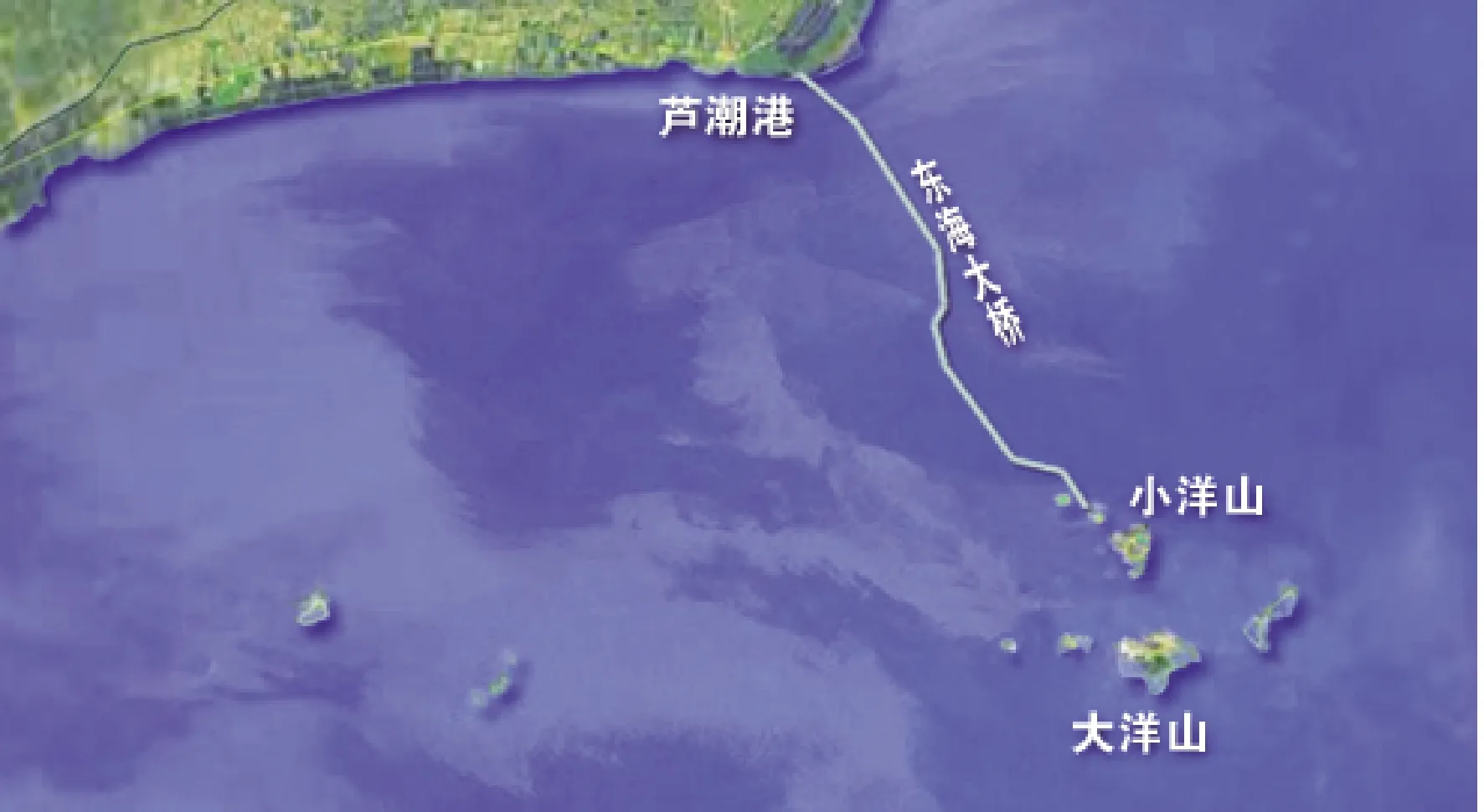
图1 洋山深水港区地理位置示意图
1 工程概况
本工程水深监测区域位于洋山深水港进港航道人工维护段,港内水域包括港内航道及一、二、三期码头回旋水域。于2017年2月19日第1次进场,至2017年10月31日完成每次港内水域及进港航道人工维护段的水深监测,共完成测量作业6次。
1.1 进港航道人工维护段
进港航道人工维护段长约11.28 km,测量宽度1000 m,水下地形面积约11.62 km2;测量范围如表1所示,四点连线为测量范围。平面坐标系为1954年北京坐标系;投影为高斯克吕格投影;椭球为克拉索夫斯基椭球;测区中央子午线122°E。

表1 洋山深水港区进港航道人工维护段 m
1.2 港内水域
包括港内航道及一、二、三期码头回旋水域,水下地形面积约6.22 km2;测量范围如表2所示。平面坐标系为1954年北京坐标系;投影为高斯克吕格投影;椭球为克拉索夫斯基椭球;测区中央子午线122°E。

表2 洋山深水港区港内水域 m
2 测区平面控制测量
2.1 控制点埋设
根据本年度水域测量需要,在测区周围小岛布设7个GNSS控制点,并标注点名,点号为E1—E7,其中E7为计算WGS84与BJ54坐标之间的坐标转换参数(七参数)后使用GNSS RTK技术采集,为仪器参数比对使用。(见图2)

图2 控制点布点示意图
2.2 平面控制网测量
控制测量采用±(8+1×10-6D)mm双频GNSS接收机,按《卫星定位城市测量技术标准》(CJJ/T 73—2019)中网络RTK观测要求组织,进行网络RTK数据采集。GNSS接收机和天线等设备在有效期内,在测量作业前进行了全面的通电检查。观测作业组严格遵守相关规程及纲要。每日观测结束后,及时将数据传输至计算机上并进行备份。
(1)技术实现
采用上海市SHCORS系统网络实时动态差分(RTK)技术,网络RTK技术满足四等以下控制测量、工程测量要求。
(2)动态RTK作业流程
测量使用的流动站设备主要包括双频GNSS接收机及天线、手簿以及数据收发用的通信链(移动通信)。其具体步骤包括:
①流动站通过设置与操作采用无线通信网络,将GPRS连接到SHCORS中心网络。
②流动站GNSS天线保持稳定,进行初始化工作获取RTK固定解。初始化时间视卫星状况、观测环境状况及不同的接收机类型等可能会持续15~60 s不等。
③在待测点上得到固定解且稳定2 min后,按控制点测量程序开始记录数据,数据记录完毕后由程序自动进行平滑处理,生成成果报告。
④如果不能顺利初始化,可移动流动站天线位置,选择观测条件好的地点进行初始化,然后返回移动到待测点上,按照步骤③进行观测。
⑤作业过程中分别初始化三次,在每个平面控制点上测量三次,求取坐标的平均数作为控制点的平面坐标。
(3)坐标系的转换
由于本次测量平面坐标系要求采用1954年北京坐标系,网络RTK采集的上海平面坐标成果经由上海市测绘院转换为1954年北京坐标系。
3 潮位控制
为确保洋山深水港区航道水深测量的潮位控制精度,需要进行验潮改正。验潮站的布设要能充分反映测区的水位变化,并符合以下要求:
(1)无沙洲、浅滩阻隔,无雍水、回流现象。
(2)不直接受风浪、急流冲击影响,不易被船只碰撞。
(3)岸坡稳定,能牢固设立水位观测设备,并易于水准测量。
(4)观测设备的设置范围,要高于最高潮位,低于最低潮位。
(5)对宽度较大的海湾,应考虑潮位的横向变化,进行水位横比降改算。
各临时验潮站高程按《国家三、四等水准测量规范》(GB/T 12898—2009)中四等水准要求,采用光学水准仪配2 m红黑水准尺进行引测。
测深期间,通过在测区附近设立的验潮站进行水位观测,通过内业改正,求出各个时刻的水面高程。潮位人工观测站由人工进行观测,每10 min观测一次,涨急、落急时适当进行加密。
3.1 进港航道人工维护段
进港航道人工维护段潮位站沿用历年《洋山深水港区航道水深监测与跟踪分析项目勘察测量项目》进港航道人工维护段测量小衢山潮位站,高程5.41 m(小衢山理论最低潮面)。坐标:X=XXXX836.88 m,Y=YYY413.75 m。其潮站位置见图3所示。

图3 小衢山验潮站注记
3.2 港内水域
港内水域测量段潮位站设立在大洋山,沿用历年项目中大洋钥匙岙水准点SK10,高程为9.218 m(小洋山理论最低潮面)。坐标:X=XXXX370.35 m,Y= YYY485.64 m。大洋山潮位站的高程按《国家三、四等水准测量规范》(GB/T 12898—2009)中四等水准要求,采用光学水准仪配2 m红黑水准尺进行引测,验潮站为5.05 m,其潮站位置见图4所示。

图4 大洋山验潮站注记
4 水深测量
4.1 施测方法
开始施测前对测量仪器进行核对。
(1)GNSS的校对
GNSS仪器有检定证书,并在有效期内。进行数据采集前,计算WGS84与BJ54坐标之间的坐标转换参数(七参数),通过测深导航软件对GNSS RTK进行了比对,符合测量规范对位置精度的要求。
(2)测深仪工前、工后比对
使用声速剖面仪测量声波在不同水深的传播速度,得到声速剖面,在水域测量前进行声速改正,同时准确量取探头吃水深度,正确配置测深仪,配合测深板对测深仪进行工前、工后的静态比对。测深板的校对深度根据测区的最大和最小水深值确定,每2 m一个台阶,进行校准,以确保水深测量数据的准确、可靠。
4.2 数据采集
水深测量采用±(8+1×10-6D)mm双频GNSS接收机配以双频测深仪,应用GNSS RTK技术辅以导航测深软件进行平面、深度数据的采集。测量时,将测深仪输出接口、GNSS RTK定位输出接口与双频测深仪连接,实现定位、测深同步打标。数据采集时实时查看GNSS RTK差分接收锁定情况,确保数据采集的整个过程中水深测量平面定位精度。
4.3 测线布设
(1)港内水域
① 主测深线布设:主测深线均垂直码头前沿线布设,间距50 m,共设126条主测深线,每条主测深线平均长度约1000 m,总长130 km。测深定位点间距为图上5 mm。
② 检查线布设:检查线垂直于主测深线布设,共布设2条。
③ 洋山深水港区港内水域按1∶5000测量。
(2)进港航道人工维护段
① 主测深线布设:主测深线均垂直航道轴线,间距100 m,共设120条主测深线,每条主测深线长度1000 m,总长118.5 km。测深定位点间距为图上5 mm。
② 检查线布设:检查线垂直于主测深线布设,共布设2条。
③ 进港航道人工维护段按1∶10000测量。
4.4 成果质量检查
布置足够的检查线是检查主测线定位和测深是否存在系统误差或粗差的有效方法,并以此衡量水深测量成果的精度,检查线与主测线以同等精度进行施测,并满足占主测线总长5%的要求。根据比差统计,检查线上的点在图上1 mm范围内与主测线测点比较,比对结果见表3—表4。从检查线的测点与主测线测点的高程符合情况来看,各测线定位和测深不存在系统差或粗差,精度符合规范要求,测深质量可靠。
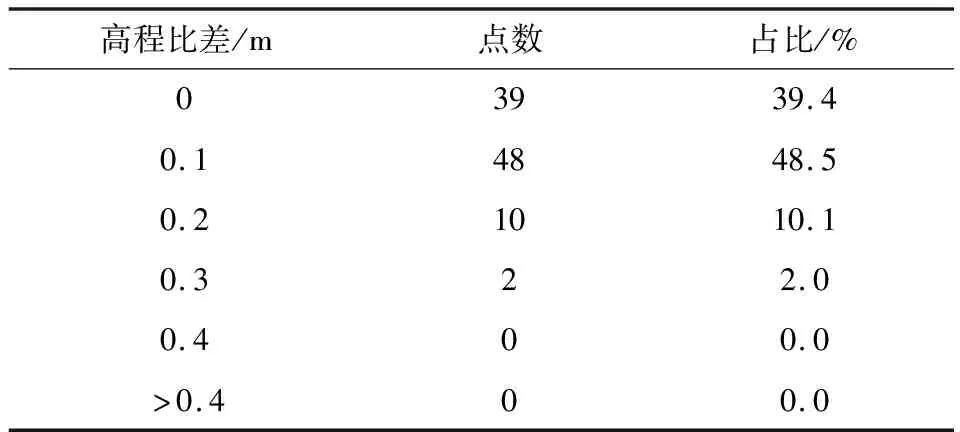
表4 港内水域主测线与检查线比对统计表

表3 进港航道主测线与检查线比对统计表
统计结果显示,深度检查较差均满足《水运工程测量规范》(JTS 131—2012)≤±40 cm(水深值≤20 m时)的要求。利用式(1)计算进港航道人工维护段深度测量中误差。
(1)
式中:n为检查点个数。
深度测量中误差结果为±10.2 cm,满足《水运工程测量规范》(JTS 131—2012)中≤±20 cm的要求。
统计结果显示,深度检查较差均满足《水运工程测量规范》(JTS 131—2012)≤±40 cm(水深值≤20 m时)的要求。利用式(1)计算港内水域深度测量中误差。
深度测量中误差结果为±7.8 cm,满足《水运工程测量规范》(JTS 131—2012)≤±20 cm的要求。
5 内业数据整理及成图
外业测量结束后对所测的记录进行全面检查、校核,对计算机应用测量软件所采集的水深数据与测深仪记录纸上的打印值逐一进行校核,并对计算机记录的数据里的卫星数、卫星质量、初始化状况等指标进行检查,无误后进行水深内业编辑。
将潮位改正数据输入水深测量软件中,生成潮位文件,并进行潮位改正;使用单波束编辑器,对照测深纸将假水深修正;最后使用潮位内插功能进行潮位改正,生成潮位改正后的edit和xyz文件,最后转换成CAD文件。
6 港内航道及港内码头回旋水域跟踪分析
6.1 水深情况分析
港内水域包括港内航道及一、二、三期码头回旋水域,港内水域沿码头方向主要呈西北浅、东南深的走势,其中北侧二期港区码头前沿水下地形较平缓,水深约14~16 m;一期港区码头前沿水下地形也较平缓,水深约16~19 m;三期港区码头前沿水下地形起伏较大,三期港区(一阶段)码头前沿呈北浅南深走势,水深变化较大,水深约19~50 m;三期港区(二阶段)码头前沿受小岩礁岛和大洋山岛影响,水下地形起伏较大,水深变化较大,水深约19~80 m;其中,小洋山岛北侧500 m处较浅,水深最浅处约19 m;该处与三期港区(二阶段)码头间水深最深约84 m(见图5)。
图5 洋山深水港区港内水域水深平面示意图
6.2 港内航道及码头回旋水域现状分析
将设计水深减去最后一次洋山深水港区港内水域实测水深,得到港内水域现状水深与设计水深的差值,进而绘制其平面分布图,分析水下地形淤积范围的平面分布规律。现状水深与设计水深差值平面分布如图6所示。

图6 洋山深水港区港内水域淤积范围平面分布图
水深差值为正值表示现状水深相较于设计水深浅,水深差值为负值表示现状水深相较于设计水深更深,红色区域为淤积区域。
从图6可以看出,洋山深水港区港内水域主要淤积区域为二期港区的大部分水域和一期港区的南半幅水域,淤积水域形似梯形,梯形上底面(沿二期港区码头方向)长约480 m,下底面长约2600 m。总体上以一、二期港区水域的对角线为分界线,对角线以南区域相较于设计水深浅,淤积厚度小于4 m;对角线以北区域现状水深均大于设计水深。
6.3 港内航道及码头回旋水域淤积厚度分布分析
根据一、二期港区水域的淤积范围[4-6],进一步针对淤积区域的淤积厚度进行细化分析,淤积区域具体淤积厚度在平面上的分布规律如图7所示。

图7 港内水域淤积厚度平面分布图
可以看出,淤积区域自南向北、自西向东淤积厚度逐渐减弱,大部分淤积区域的淤积厚度在1~3 m之间,淤积区域最浅水深约为12.2 m,最浅点位于二期港池最西侧中部。
7 结论
(1)对洋山深水港航道进行了水深监测与跟踪分析,全面掌握航道的现状、水深变化趋势及河床变化趋势等,为疏浚提供初步的参考依据。
(2)对洋山深水港进行了水深监测与跟踪分析,掌握了水深实际情况和港池内航道及码头回旋水域淤积厚度,为洋山深水港的正常通航提供了安全保证。
(3)对航道、码头水深及冲淤分析均建立在实际测量的基础上,可以利用多次测量数据建立数据模型,对后期水深及冲淤进行预测分析。