极地船舶与海冰作用方式及冰载荷求解概况
2020-08-14曲自信王昌朔陶舒畅
曲自信 王昌朔 苏 桐 黄 山 陶舒畅
0 引言
北极地区蕴含着极为丰富的资源。近年来,北极地区的冰量越来越低,穿越北极最短航线的开通成为现实。许多极地附近的国家都加大了对极地航行船舶的研发设计工作,包括环境预报、极地船舶结构设计、总体性能等等。同时由于极地寒冷多冰的自然环境,对整个极地船舶系统的适应性和可靠性也提出了严格的要求[1]。
作为海洋大国和海洋装备制造的强国,面对日趋激烈的国际能源竞争,中国越来越重视极地船舶包括破冰船的自主研发能力。我国对极地航道及极地船舶的研发需求2013 年才正式提出。相对于近极地国家,我国极地冰区船舶研究尚处在起步阶段,急需开展冰区航行船的研究工作。本文针对极地船舶进行文献调研,讨论海冰对极地船舶的作用及其强度问题。
1 极地船舶的特点
在极地及极地周边地区航行的船舶,由于低冷的自然环境,海面固结成海冰,使极地船舶在方案设计、结构特性、材料性能、运动方式等方面有着特殊的要求。总的来说,极地船舶要有坚固的船体,即高要求的船体强度、破冰能力强、防寒性能好、抗御超低温恶劣环境、强大的后勤补给、强劲的动力设备,来御预期冰况、结冰、低气温、高纬度、极昼/极夜、极端、偏远等环境风险[2]。
2 极地船舶的分类
2.1 按功能分类
极地船舶按功能可分为极地运输船、极地科学考察船、极地海洋工程船、破冰船[3]。
极地科学考察船是在南北极海域进行考察和研究,具有破冰能力的综合测量考察船,如中国的"雪龙"号。极地运输船主要是为北极航线全年候运行海工模块等。如Yamal LNG 极地运输船。极地海洋工程船主要用来进行极地海上油气开发和能源利用。专业破冰船的主要作用是压碎冰层,开辟航道。
2.2 按冰级分类
极地船舶需要应对极地严酷环境的挑战,尤其是海冰的存在,对极地船舶结构提出来更高的挑战[4]。为了保障极地船舶航运安全,世界上主要船级社(如 ABS,BV,DNV,LR,GL,CCS,NK)都制定了各自的冰级规范。在IACS(国际船级社)颁布的《极地船舶分类规范》中将极地航行船舶分为7 个级别,如表1,用来规范指导极地船舶的设计建造。
3 极地船舶的破冰方法
极地船舶在极地地区航行,必然要面对冰雪堆积的海洋环境,这也是极地船舶与常规船舶最大的区别,如何在冰封的海面航行,对极地船舶提出了特别的挑战,极地船舶常见的破冰方法见表2。
随着全回转推进器的出现,破冰船不仅能船首破冰航行,船尾也能破冰航行。破冰船可以首向正常航行;当遇到坚硬的冰脊和冰坝时,艉部朝前,利用船尾特殊的螺旋桨将冰脊下方的冰块"掏空",实现破冰前行。
4 极地船舶与冰的作用
极地船舶遭遇的冰载荷取决于船-冰相互作用方式、船体几何形状、浮冰的特性和参数。IACS 极地冰级规范中,通过计算船舶与冰碰撞来计算冰载荷,碰撞过程中考虑了船速、浮冰厚度、冰的几何形状等参数[5]。极地船舶也可能碰到规范定义之外冰载荷,因此各个船级社给出的定义有所区别[3]。
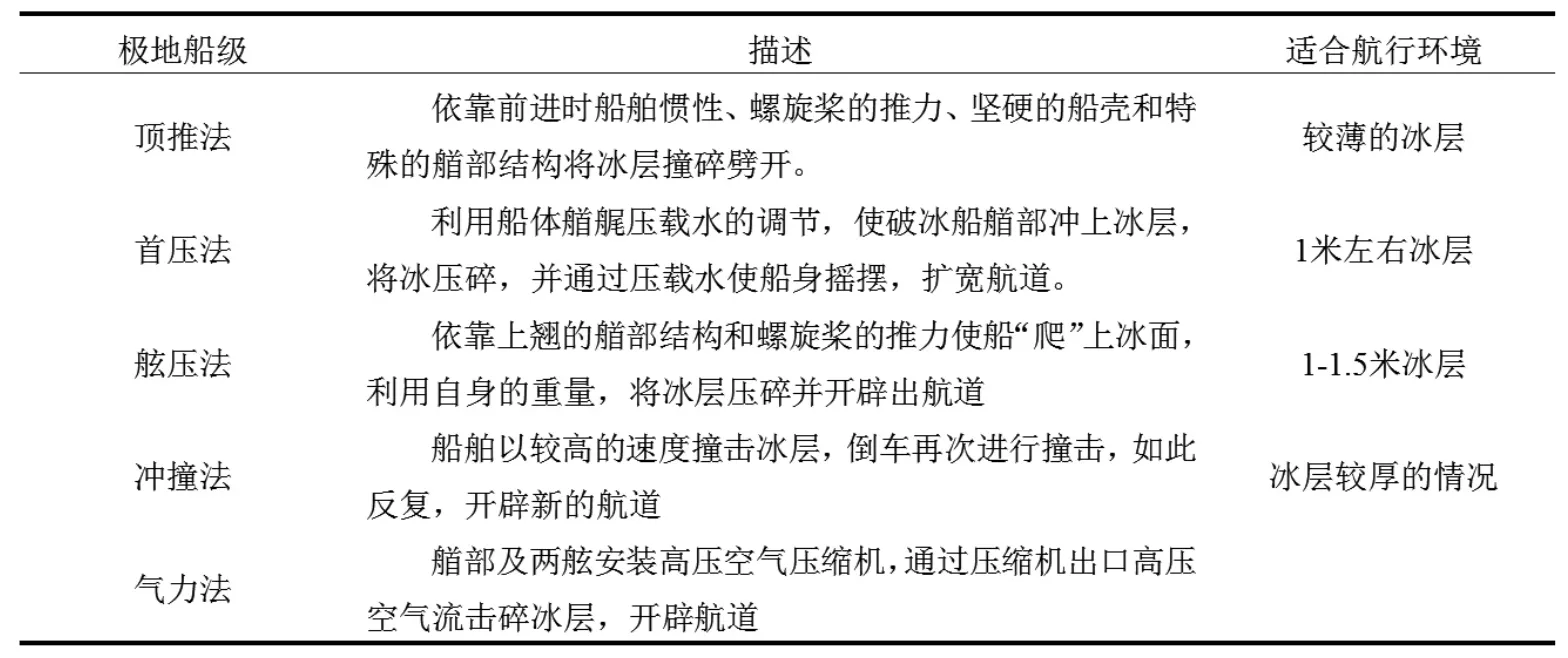
表 1 IACS 极地规范

表2 极地船舶破冰方法
研究船舶与冰相互作用并不是针对全船,而是通过研究船体区域的影响。极地船舶上有7 个区域可能会与冰发生作用[4]。分别为艏柱、艏部、肩部、舯部、舭部、底部和尾部,见图1。
4.1 船体与层冰的作用
极地船舶破冰前进时。依靠螺旋桨推进力和特殊的艏部构造使船舶艏部驶上层冰,船头驶上冰层之后会对冰层产生向下的压力压断层冰。船体舷侧及其他曲率较小结构和层冰互相挤压,在接触区域引起局部载荷,阻止船舶的运动。因此,需要重点研究冰区航行船舶舷侧结构设计及强度分析。
4.2 船体与浮冰的作用
船舶航行区域的海冰不连续,各个离散,船体不同区域将与浮冰接触。当浮冰在海流作用下发生较大运动时,船体与海冰作用将产生较大作用力。当没有及时调整航向,舷侧、船肩及艉部等区域与浮冰发生碰撞作用。船结构将受到很大局部载荷。
忽略浮冰与船体作用后碎裂,浮冰与船体作用可以简化为刚体的运动方程:
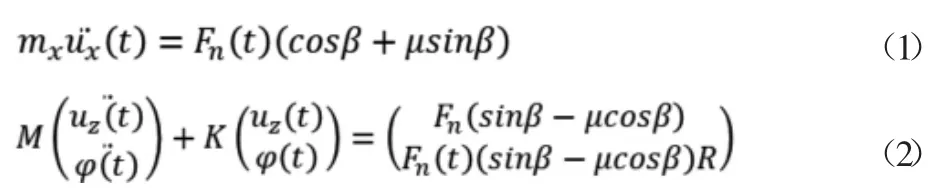
式中:M-浮体质量阵;K-浮体刚度阵;ux-浮冰重心水平运动速度;uz-浮冰重心垂直运动速度;β-浮冰倾斜角;R-冰缘的压入深度。
4.3 船体与冰脊的作用
海冰受到风浪流的联合作用,同时随着温度、结构的变化,在层冰表面会形成冰脊。由于形成机理的区别,其受力更为复杂。从结构上冰脊可分为由结构较为松散的上部帆高与下部的龙骨结构以及中间被压实固结层。冰脊产生的冰载荷由固结层导致的结构载荷和帆高所产生摩擦阻力。
4.4 冰对船体的挤压作用
由于风浪流的存在,冰以一定的速度在海面运动。如果冰层较为坚硬且与船有一定的相对速度,将会发生挤压作用。挤压力垂直作用在舷侧,作用高度很小并分布于船长方向较长的区域。对船将产生很大的威胁。
4.5 冰对船体的碰撞作用

图1 船舶与冰相互作用区域

图2 船艏破冰过程示意图

图3 船艏与浮冰作用
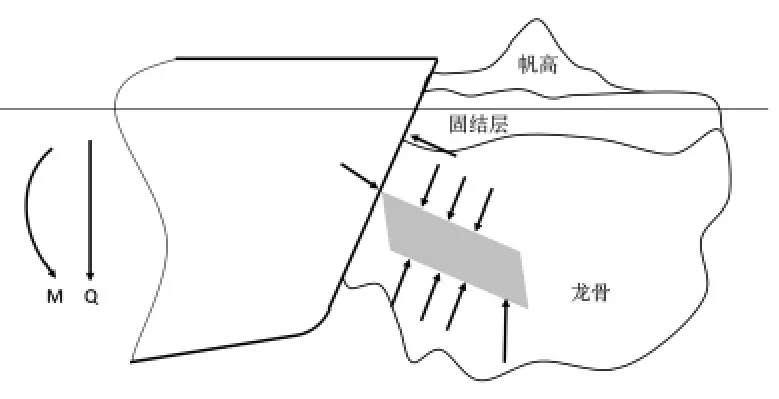
图4 船艏与冰脊作用
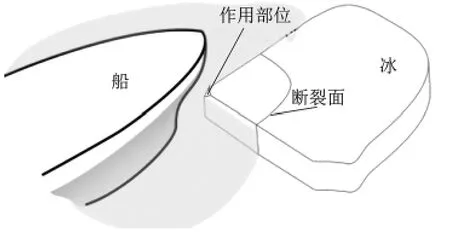
图5 船舶与冰相互作用示意图
极地航行区域环境复杂,极地船舶会遭受浮冰、碎等的撞击。因此开展流动冰载荷下船冰碰撞动态响应研究十分必要。1982 年,芬兰研究人员提出了细长结构与冰相互作用的数值仿真模型。后来在此基础上开发了宽体结构非线性动态响应的计算程序(PSSII)。加拿大研究人员在1994 年对船与多年冰及冰山碰撞时的动态响应进行了研究,提出了考虑流固耦合的非线性船冰碰撞计算模型。
5 冰载荷理论计算方法
5.1 能量平衡原理
船体与海冰相互作用过程中,会产生产生能量传递,局部海冰将发生能量损耗[6]。船体与冰接触后产生的能量损失由海冰的变形所吸收,通过研究两者作用后海冰变形来计算船体所收到的冰载荷,就叫能量法。能量法假设:
(1)冰-船作用中海冰结构没有破坏,但发生了变形。
(2)忽略船在海水中的能量损失。
(3)冰-船作用前海冰相对静止。
(4)冰-船作用位置处于冰层的一个直端点处。
(5)冰层对船体的摩擦暂不考虑。
能量法通过碰撞来建立相应的冰载荷模型[7],得到冰载荷产生的压力和作用范围。计算中考虑了船速和浮冰特性(如浮冰强度、形状和厚度等)[8-10]。通过建立能量法基本方程,求船体的海冰作用力。
5.2 冰力函数求解
求解能量方程需要知道船体和冰作用后的变形情况。加拿大纽芬兰纪念大学Daley 教授在1999 年对Popov 的模型进行了拓展,建立的冰载荷模型适用于其他典型的船舶与冰相互作用工况,提出了修正能量方法,得到的计算结果更符合实际情况。当船舶通过压碎与冰相互作用时,最大作用力公式如下[8]。

式中:fa与形状有关,Vship、Mship是船的速度和排水量,PO是冰的厚度。
5.3 海冰动力学本构模型
目前为止,学者们提出了很多海冰动力学本构模型,如粘塑性模型、弹塑性模型、各向异性模型和粘弹塑性模型等。利用能量方程或加权残量方程,用有限元法求解船舶或结构与海冰的作用力和力矩。Lau 等人分别采用二维和三维海冰相关问题的离散元法对一系列海冰-结构和海冰-船的碰撞问题进行了模拟。
根据极地船舶与冰的相对速度可以将冰载荷分为静态响应与动态响应。冰载荷为随机载荷,当不考虑冰载荷随时间变化的特性时,海冰为静载荷,此时船的响应为静态响应。当考虑冰载荷的历时过程时,船的响应为动态响应。极地船舶的动态响应包括受到动态冰载荷时的强度与振动问题,现有的设计规范无法准确预报极地船舶对动态冰载荷的响应。
6 结论
最近几年,关于极地船舶结构强度分析问题的理论研究、数值模拟和实验技术在不断完善。国际船级社联合会等制定了相关极地船舶的规范,为极地船舶的设计建造提供参考。但是,极地船舶与海冰的作用方式与强度计算方法还是没有完美的解决,国内极地船舶的研究刚刚起步,缺乏建造经验,极地船舶还没有形成规范体系,需要在今后研究和建造中不断积累和发展。