基于无人机摄影测量的大比例尺测图研究
2020-08-13杨庆振
杨庆振
摘 要:无人机技术与航空摄影测量相结合,使得无人机航摄系统成为航空摄影领域的一个新型重要方向。本文以无人机摄影测量系统为研究对象,结合工程实例,详细阐述利用“天行”八旋翼无人机的航摄影像制作 1:500 大比例尺地形图的工作流程。然后以临沂市兰陵县测区得到的航测数据为例,具体研究并分析了无人机航测数字线划图能达到的精度。
关键词:无人机 摄影测量 精度 大比例尺测图
中图分类号:P231 文獻标识码:A 文章编号:1674-098X(2020)06(a)-0047-02
随着遥感技术和计算机技术的不断更新、无人机技术迅猛发展,无人机摄影测量技术也应运而生。无人机摄影测量系统相比较于传统的航空摄影测量系统。其独特的优势在于:第一,平台构建容易,维护方便,成本在大幅度的降低;第二,无人机摄影测量系统体积小、重量轻、操作方便,飞机在起飞降落时不需要专门的起降机场,且可用多种方式起飞和降落,机动灵活;第三,受天气条件和地面地貌状况影响较小,作业方式相对比较安全,人工在地面控制飞行,使得无人机可进入危险地带开展作业,从而降低工作人员的在作业过程中的风险;第四,无人机在飞行时航高低于载人飞机,且搭载的是非量测数码相机,能快速、有效的获得分辨率较高的遥感影像图,方便用于观察小范围内地表地貌的细节变化,从而进行大比例尺地形图的制作;第五,获取影像速度快,后期作业流程化,简单化,缩短了整个作业的周期,能够快速获取所需地图产品。正是无人机摄影测量系统的这些优点,使其成为补充传统航天摄影测量的一种重要手段,逐步得到测绘、地理信息等领域的广泛关注,并被普遍应用在天气的监测和预报、国土资源环境的调查、城市管理、海事信息化的建设与动态管理、灾害预报、灾害监测与评估、国家海洋权益保障、农业监测、电力维修、水利勘察等各个领域。
1 无人机影像获取流程和技术路线
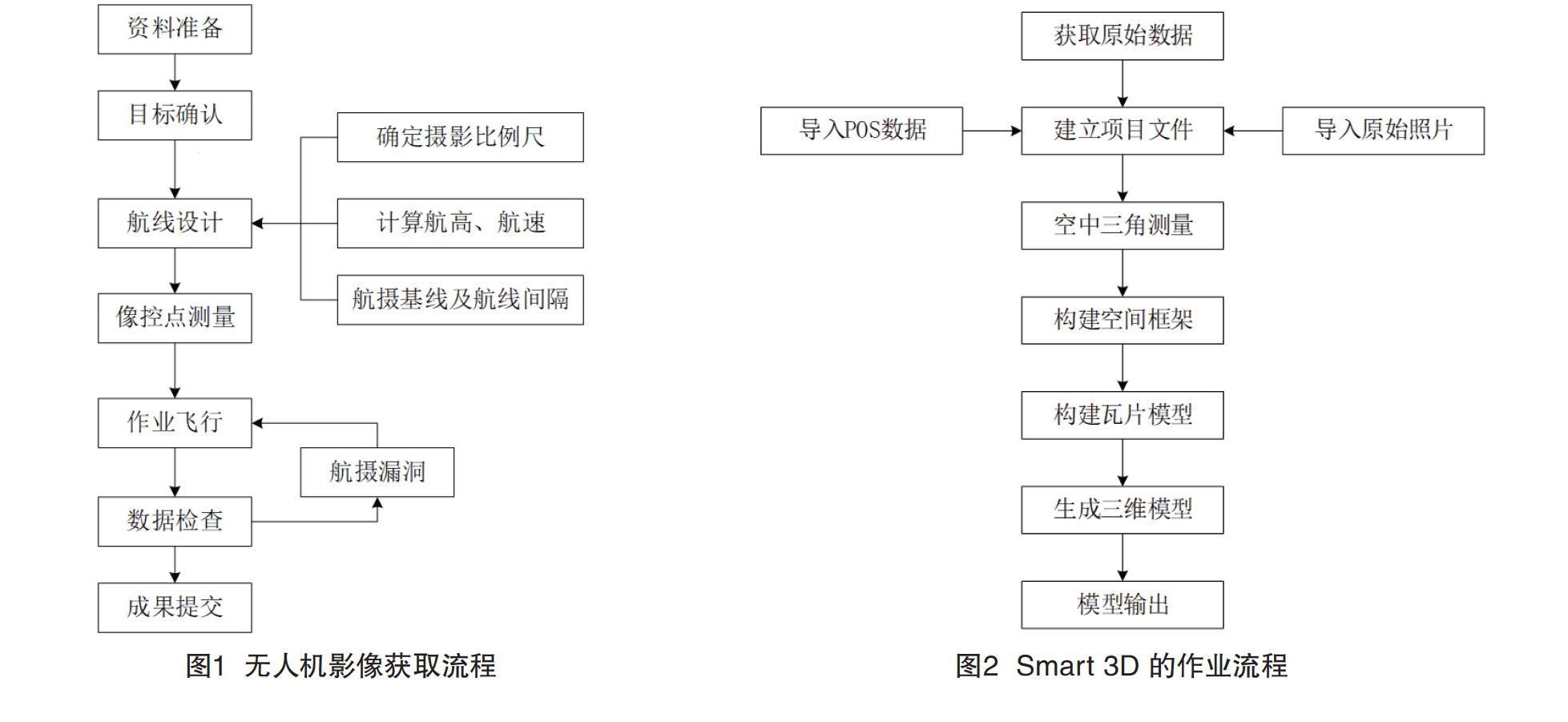
本文采用南方测绘“天行”八旋翼无人机搭载Sony RX1RM2数码相机,在临沂市兰陵县进行了生产作业,获取无人机低空航摄遥感影像并完成1:500大比例尺地形图的成图。本次作业选用的数据处理软件是Smart 3D三维实景建模软件和清华山维EPS裸眼3D测图软件。无人机影像获取流程如图1所示。
1.1 测区概况
本次的作业区位于临沂市兰陵县。测区属于温带季风气候,四季分明,春季干旱少雨,夏季温热多雨,秋季凉爽干燥,冬季寒冷少雪。本次作业任务是为了该地区前期的旅游开发项目做一个前期的勘察工作,项目面积约为3km2左右。
起飞前,需要对测区已有资料进行收集。本次作业测区的已有资料包括从相关部门收集到该地区已有三个控制点,可以作为布设像控点的起算点,本次作业控制点坐标系采用 1980年西安坐标系,1985高程基准。提前与甲方做好沟通并提供测区范围线,并且告知地区的难度重点,以及最大的海拔高差等有关信息。
1.2 航线设计
航线设计确保无人机能够按照预定轨道进行飞行作业,并保证飞行过程中的各种参数满足相关轨迹。航线设计是否合理关乎最终成果,要严格按照相关规范进行设计,并做好复查工作,确保飞行过程的安全和飞行数据的可靠,本节主要是按照相关要求,计算出航线设计的所需参数。
1.3 外业像控点测量
为保证本次测量作业的精确,本次野外像控点的布设严格遵守野外像片控制点的布设原则,共布设了76个野外像控点,本次坐标系采用1980 年西安坐标系,1985 高程基准,中央子午线为 114°。其中三个已知控制点作为起算点,使用GPS-RTK结合温州CORS 账号进行平滑采集,计算结果平面、高程精度均满足规范要求。
2 内业数据处理
得到的两个测区的影像数据后,采用 Smart 3D 软件进行内业数据处理,该软件是一款集数据导入、空三加密、三维建模于一体的自动化航空影像处理软件,该软件自动化操作程度高,能够生成应用于EPS裸眼3D测图软件的osgb瓦片格式的数据。通过该软件生成的三维模型精度高、效果好,可以满足大比例尺成图所需要的模型的要求,Smart 3D软件处理数据的流程见图2。
2.1 航测原始数据的导入
首先将本次航测获取到的记录飞行姿态的POS数据、影像数据和像控点数据在数据导入界面导入到Smart 3D 中,完成航测数据的录入工作。
2.2 空中三角测量
设置好像片的相关属性后,选择提交空中三角测量,可以设置空三的名称,定位、参考方式以及其他设置等。如果对一次空三加密的计算结果不满意,Smart 3D 可以进行多次提交空三加密,直到符合精度要求。本次试验共进行了两次空三加密。
2.3 构建三维模型
空三加密完成之后,开始进行三维模型的构建,Smart 3D 的三维模型构建高度自动化,本次构建需要生成的是OSGB 格式瓦片模型,为了加快生成模型的速度和精度,需要对整个测区的空间框架进行构建,选取生成的模型范围。根据电脑性能和测区的实际情况,将整个测区共分为 49个瓦片。
随后提交项目生产。Smart 3D可以生成三维网格、三维点云、正射影像和数字表面模型。根据不同生产项目的需要可以生产不同类型的数据。
2.4 数据成果
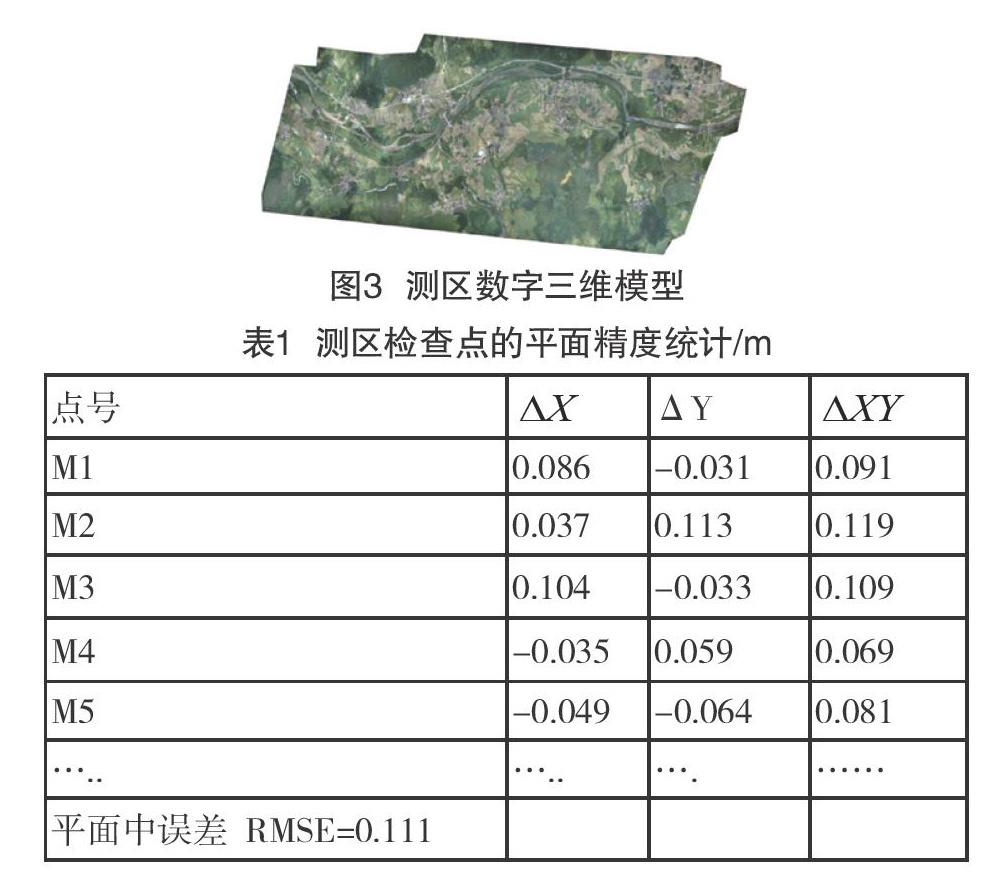
经过上述步骤,就完成了内业处理的整个步骤,再经过对后续成果整理和修饰,就可得到测区的数字三维模型。
3 精度分析
本文精度分析主要是利用GNSS-RTK 系统对测区内明显的地物点实测其平面坐标和高程,然后在数字线划图上选取该点的图上坐标和高程,最后利用中误差计算公式计算其平面精度和高程精度。检查点主要选取一些比较明显、在像片上比较容易辨别的点,比如道路上斑马线或者交通标志的垂直拐点、测区内平房的房屋拐点、硬化水泥路十字路口的交点等。
3.1 平面精度分析
利用GNSS-RTK 系統对测区内20个明显的地物点实测其平面坐标和高程,然后在数字线划图上选取该点的图上坐标和高程,最后利用中误差计算公式计算其平面精度和高程精度,可以得到测区检查点的平面精度统计结果如表1所示。
从上表可以得出测区平面精度统计结果:X方向中误差为0.066m,最大误差为-0.109m,Y方向中误差为 0.089m,最大误差为 0.155m,平面坐标中误差为0.111m,最大误差为0.199m,均满足规范要求。
3.2 高程精度分析
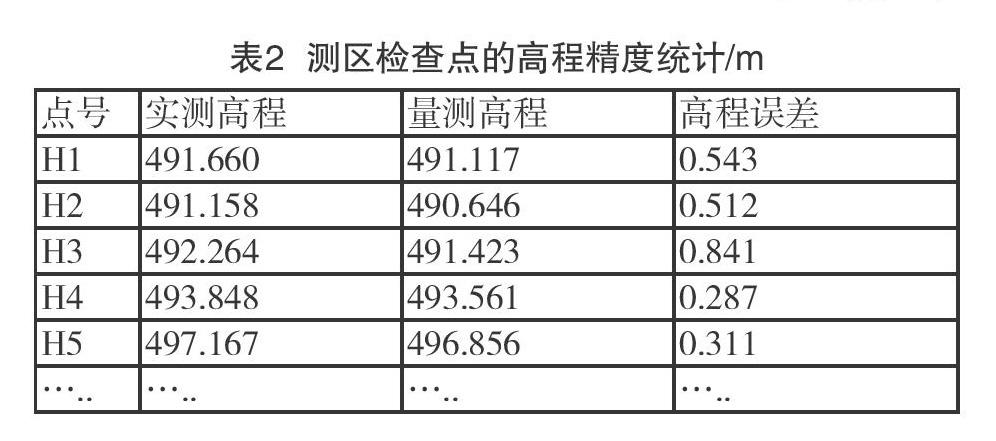
同样可以算出测区的高程误差和精度,如表2所示。
从表3可得,测区的高程中误差为 0.275m,最大误差为 0.439m,该测区地形起伏不大,大多属于平地和丘陵地,满足1:500 地形图对高程精度要求。
4 结语
系统阐述了无人机摄影测量系统在大比例成图中的完整流程,通过实例精度分析,可以得到结论:在控制好成图过程误差传播,严格按照规范要求获取影像数据,数据处理过程严格把关,无人机航测大比例尺地形图可达到 1:500比例尺的成图精度,尤其是在平原地区平面精度和高程精度都很高,可以在该地区应用于生产实践。
参考文献
[1] 吴勤书,赵卓文,张时智.新时代测绘地理信息服务于自然资源管理的思考[J].测绘通报,2019(S1):168-170.
[2] 穆增光,刘慧慧.大比例尺地理信息数据服务模式的研究[J].测绘与空间地理信息,2019,42(4):112-114.
[3] 张祖勋,陶鹏杰.谈大数据时代的“云控制”摄影测量[J].测绘学报,2017,46(10):1238-1248.
