激光三角法测距原理研究
2020-08-07吴博文冯国强
吴博文 冯国强

摘要:激光三角法测距是一种以激光为光源的非接触式测量方法,其测量速度快、精度高,已被广泛的应用于工业生产检测领域。本文首先介绍了激光三角法测距的基本原理;然后对不同的测量方案例如直射式和斜射式单点激光三角法测距进行系统的分析和比较;其次对各个测量方案的优缺点、各方案中采用的光电仪器的作用与优劣,以及影响激光三角法测量结果的因素与其解决方法进行了归纳和分析。
Abstract: Laser triangulation is a non - contact measuring method with laser as the light source. It has been widely used in the field of industrial production inspection. This paper first introduces the basic principle of laser triangulation method, and then analyzes and compares the different measurement schemes such as direct beam and oblique beam single point laser triangulation method. Secondly, the advantages and disadvantages of each measurement scheme, the functions and advantages and disadvantages of the photoelectric instruments used in each scheme, as well as the factors affecting the measurement results of laser triangulation method and their solutions are summarized and analyzed. Finally, an improved laser triangulation measurement scheme is designed and its feasibility and influencing factors are discussed. The development trend and prospect of laser triangulation are deduced.
关键词:激光三角法;测距;直射式;斜射式
Key words: laser triangulation;distance;direct type;oblique type
中图分类号:TN249 文献标识码:A 文章编号:1006-4311(2020)22-0242-03
0 引言
随着工业的发展,与科学技术的进步,在一些领域对测量方面的要求越来越高越来越严格。而有时传统的接觸式测量方法不能较好的完成这些测量任务,然而非接触式测量方法却可以在同等的测量条件下较好的完成测量任务。例如在极端的环境下进行测量和狭小空间进行微小测量等[1-2]。其中激光三角法测距技术是非接触式测量方法中应用较为广泛的一种技术,其拥有以下优点:①测量距离时,被测物体不会产生形变,测量精度提高。②在对精密物体进行测量时被测物体表面不会产生磨损,降低了额外损失。③可以在一些极端的环境下完成测量任务。④测量速度快[5]。对于激光三角法测距的原理的研究可以为激光三角法的实际测量提供良好的指导作用。
1 激光三角法测距的概念
1.1 激光三角法测距的原理
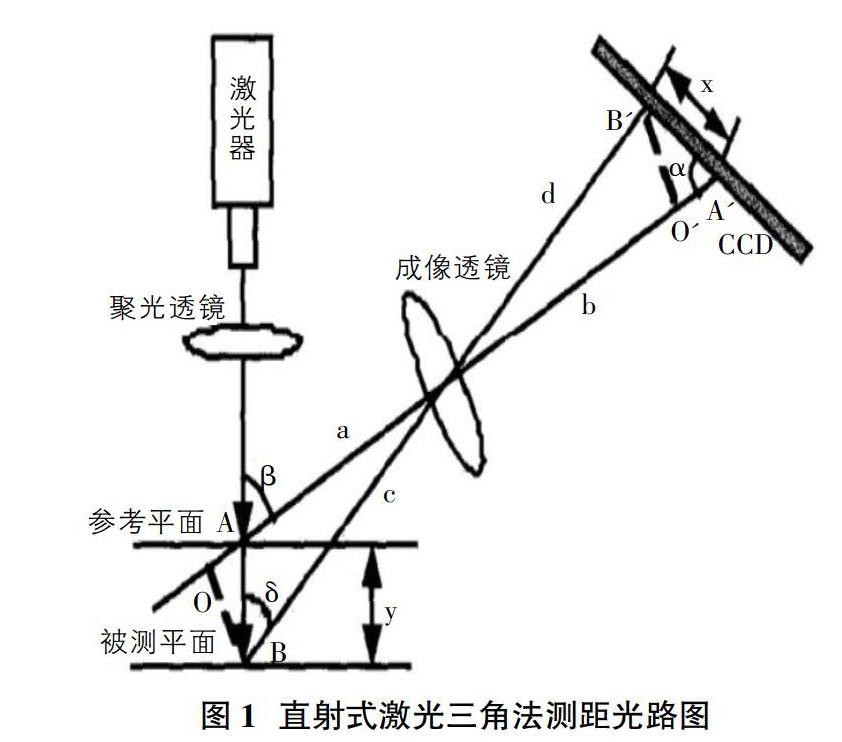
在使用激光三角法测距技术进行测量时,一束激光照射在被测物体上发生散射或者反射(漫反射),之后散射或者反射的光用过接收透镜成像于光电探测器上。当被测物体位置发生移动时,在光电探测器上所成的像也会发生相应的位移(该位移通过光电探测器确定)。然后通过几何三角形确定被测物位移与像位移关系,就可以得到被测物体移动的距离[1]。光电检测器件进行光电信号转化时,光斑越清晰则在对光电检测器件输出的电信号处理计算后所得到的光斑位置越精确[5]。故而在用图1所示光路测量被测物体移动距离时,在测量过程中尽量要让光斑保持在清晰的状态。所以此时光路必须要满足Scheimpflug条件。Scheimpflug条件:Scheimpflug(恰普斯基)条件又称“交线条件”、“向甫鲁条件”,是指为保证整个承影面上有清晰的构像,使底片面、物镜面和承影面相交于同一直线的条件。
如图1所示,为直射式激光三角法测距。
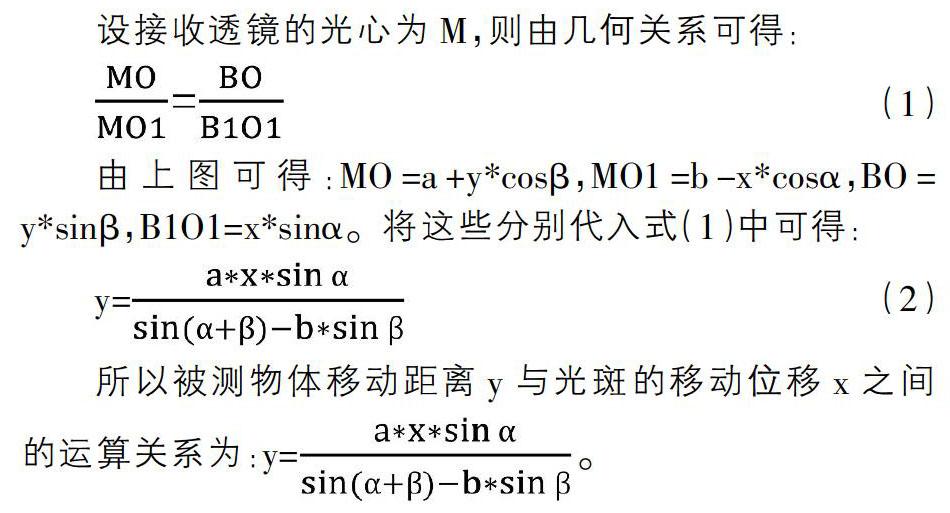
设接收透镜的光心为M,则由几何关系可得:
由上图可得:MO=a+y*cosβ,MO1=b-x*cosα,BO=y*sinβ,B1O1=x*sinα。将这些分别代入式(1)中可得:
所以被测物体移动距离y与光斑的移动位移x之间的运算关系为:y=。
Scheimpflug条件的推导过程如下:
在用图1所示光路测量被测物体移动距离时,测量过程中始终光斑保持在清晰的状态则:。联立两式可得: (3)
由几何关系可得:MO=a+y*cosβ,MO1=b-x*cosα。将之进行变换可得:
联立式(3)和式(6)可得:tanα*b=tanβ*a
所以Scheimpflug条件的表达式为:tanα*b=tanβ*a。
如图2所示,为斜射式激光三角法测距。
由图2中的几何关系可得: (7)
由图2可以直接得知:BC=,B1D=x*sinβ,OC=L+,OD=L1-x*cosβ。将它们分别代入式子 (7)中可得:
y= (8)
所以被测物体移动距离y与光斑的移动位移x之间的运算关系为:y=。
Scheimpflug条件的推导过程如下:
在用图3所示光路测量被测物体移动距离时,测量过程中始终光斑保持在清晰的状态则:。联立两式可得: (9)
由图2可直接得出:OC=L+,OD=L1-x*cosβ。将这两个式子经过变化后可得:
(10)
联立式(7)和式(10)可得:
(11)
联立式(9)和式(11)可得:
tan(α+γ)*L=tanβ*L1
所以Scheimpflug条件的表达式为:
tan(α+γ)*L=tanβ*L1。
1.2 激光三角法测距的优缺点分析
①直射式单点激光三角法测距的优缺点分析。
使用直射式激光三角法测量物体位移时,光电探测器只能接受散射光,且有时会由于散射光过于弱小而导致光电探测器输出信号过于弱小而导致测量无法进行。只能用于测量散射性好的物体,例如表面粗糙的物体和形状不规则物体,而不适用于测量较为光滑物体。其分辨率相对较低,但其测量范围相对会相对较大,且更容易操作和实现实验目的[1-2]。
②斜射式单点激光三角法测距的优缺点分析。
使用如图2所示光路测量物体距离时,光电探测器主要接收来自物体表面的反射光,不会出现由于光的强度过于弱小而导致光电探测器输出信号过于弱小而导致测量无法进行情况,适用于测量表面光滑的物体。其分辨率相对较高但是其测量范围相对会相对较小,在实验时不易操作且斜射式激光三角法系统所占空间相对较大。当被测物体表面发生移动时入射光光点照射在物体表面不同的点上,从而无法得知被测物体表面某一点的位移情况,故而斜射式激光三角法不能用于测量不规则物体[1-2]。
1.3 激光三角法测距的常规应用
如图3所示为激光三角法测距的常规应用方法。
令某一束散射光经过接收透镜光心射到光电检测器件上这道光线与光电检测器件夹角为α。由图3可直接得到tanα=,由几何图形可得Z=b*tanα,则联立两式可得Z=。在该光路中b,f是已知量。物体移动的位移是被测物体移动后Z的量减去被测物体移动前的Z量。
这种表述方式的优缺点分析:
其原理与操作过程较为简单。这种表述方式中不需要测量角度,这避免了在测量角度时人为因素产生的误差,并且只要高准确度的标定b和f值就可以保证一定的测试不确定度。但是这种表述方式中不满足Scheimpflug条件,所以在测量过程中光电探测器上的光斑无法保证保持清晰的状态,这会影响最终所得的被测物体移动距离的结果,给测量带来误差。
2 测量时重要的仪器选择
①激光器的选择:一般选择常见的可见光半导体激光器。激光口径越小最终在光电探测器上所形成的光斑就会越小,则确定的光斑位置就越准确,这有利于减小实验误差。半导体激光器射出的激光口径要小于He-Ne激光器射出的激光所以應当选择半导体激光器,则在测量时一般会选择可见光半导体激光器。
②在激光三角法测距过程中最重要的一步就是通过光电检测器件将光信号转化为电信号,并对输出的电信号进行处理与运算。在这个过程中一般选用光电检测器件的都是电荷耦合器CCD (一般是线阵CCD)或者位置敏感器PSD[1][4]。
①CCD是由很多像元组成光敏器件,CCD最基本的构成单元为MOS电容器。其工作原理分为:电荷储存、电荷耦合、电荷的注入与检测。其在位置信息测量时,其优点在于测量精度高、稳定、线性度高。缺点在于:电路复杂和成本相对高。在选用光电探测器时应考虑这些问题[1]。
②PSD的主要作用是测量光点的连续位置,是一种非分割型器件。其工作基本原理是:当一束光照射在PSD感光面上P层时,在被照射位置产生光能量对应的电子—空穴对流过P层电阻,连接在感光面板两端的电极上就会有电流产生,两端电流的差异和光点在感光面上的位置有关。其优点在于:响应速度快,位置分辨率较高,处理电路简单。[3]缺点在于:由于是模拟信号输出,A/D转换后失真较大,以及零位变化范围大,容易受环境光影响,在选用时应考虑这些问题[1]。
③其他仪器的选择:1)准直透镜和接受透镜选凸透镜。2)被测物体选择白屏。3)MATLAB软件。
3 测量方案的选择
根据以上分析,对斜射式激光三角法测距进行改良,改良后其光路为图4。
类比斜射式激光三角法测距可得被测物体移动距离与光电检测器件的运算关系式为:
Scheimpflug条件为:tanβ*a=tanα*b
方案分析:有效地解决了实验所占空间较大的问题,并且在测量时操作难度相较于改进前稍有降低。在测量距离时需要测量的角度有所减少,可以减少实验误差。分辨率相对会较高,但是其测量范围相对会相对较小。
4 影响测量的因素
影响激光三角法测量的因素主要有:测量过程中系统的放大率的变化、环境的温度与湿度对空气折射率的影响、激光束强度分布不好、光电检测器件固有的误差与分辨率、被测物体表面的粗糙度、被测物体表面颜色、激光的稳定性、测量时方案选择不当与操作有误等因素。
①在测量时由测量过程中系统的放大率的变化而引起的误差。可以采用定点标定和插值来削减误差。
②由环境的温度与湿度对空气折射率的影响而导致的误差。可以采用双光路结构或者标准点校正方法来消除误差。
③由激光束强度分布不好、被测物体表面的粗糙度而产生的误差。保证激光束的质量和采用信号峰值求光斑中心位置,或采用全数字处理来消除误差。
④由被测物体表面颜色所引起的误差。在标定传感器侧头时与测量时的被测物体颜色保持一致来避免该误差。
⑤由激光的稳定性不佳导致的误差。可与通过光学双稳装置来稳定光源的光强以减小误差。
⑥由在測量时方案选择不当与操作有误而导致的误差,应在测量前分析当前情况选择合适的测量方案,测量时要仔细和小心操作[7]。
5 总结
本文在研究激光三角法测距的原理的过程中对激光三角法测距的已有光路与重要器件进行分析,找出各方案的特点。在该过程中,知道了所需重要仪器工作的原理和它们各自优缺点与它们各自对测量结果有何影响。掌握激光三角发测距时被测物体移动位移与光斑位移之间的运算关系式的推导能力。找到影响激光三角法测距结果的因素,提出解决这些因素对测量结果的影响的方法,减小测量时所产生的误差。这些可以为激光三角法测距的实际操作提供良好的指导作用。
参考文献:
[1]王晓嘉,高隽,王磊.激光三角法综述[J].仪器仪表学报,2004,8(4):601-608.
[2]贾琦,谢劲松.基于三角法的激光位移传感器的设计及实现[J].长春大学学报,2014,24(8):1035-1037.
[3]徐俊峰,赵振明.激光三角法测距系统[D].长春理工大学,2012(3).
[4]万谨,黄元庆.激光三角法测量的研究[J].三明学院学报,2006,12(4):361-364.
[5]黄战华,蔡怀宇,李贺桥,张以谟.三角法激光测量系统的误差分析及消除方法[J].光学精密工程,2002,29(3):58-61.
[6]常诚,张志峰.激光三角法测量的误差研究[J].中国科技信息2006,2(2):6-11.
[7]吴剑锋,王文,陈子辰.激光三角法测量误差分析与精度提高研究[J].机电工程2003,20(5):89-91.
作者简介:吴博文(1998-),男,湖北黄冈人,本科;冯国强(指导老师)。