基于激光雷达检测的隧道安全预警系统研究
2020-08-07钟秋黄国萍
钟秋 黄国萍

摘要:为提高隧道的安全预警和处置能力,本文研究了一种基于激光雷达检测的隧道安全预警系统。首先在分析公路隧道安全预警需求的基础上,设计了包含入口激光式扫描传感器和抓拍相机、出口激光式扫描传感器和抓拍相机、工控机等组成的预警系统;接着从系统运行、车型检测、车辆出入口匹配、车辆变道检测四个方面研究了系统运行原理;最后就系统实际运行效果进行分析。实际运行数据分析结果表明,本系统能有效地检测交通事件,准确快速的达到预警效果,为隧道安全预警提供一种新的设计和实现方法。
Abstract: In order to improve the safety early warning and disposal capability of tunnels, this paper studies a tunnel safety early warning system based on laser radar detection. Firstly, based on the analysis of highway tunnel safety warning requirements, an early warning system consisting of inlet laser scanning sensor and capture camera, export laser scanning sensor and capture camera, industrial computer is designed. Then, the operation principle of the system is studied in four aspects: from system operation, vehicle type detection, vehicle entrance and exit matching and vehicle lane change detection. Finally, the actual operation effect of the system is analyzed. The actual operation data analysis results show that the system could effectively detect traffic events, accurately and quickly achieve early warning effects, and provide a new design and implementation method for tunnel safety warning.
關键词:激光雷达;隧道安全预警;事件监测;系统研究
Key words: laser radar;tunnel safety warning;event monitoring;system research
中图分类号:U456.31 文献标识码:A 文章编号:1006-4311(2020)22-0218-06
0 引言
随着我国基础公路和隧道建设的快速发展,到目前为止,我国已是世界上公路隧道建设数量最多、里程最长的国家。公路隧道在缩短行车距离、提高车速等方面发挥了积极作用,但在交通安全方面存在着一定隐患。与开放路段相比,公路隧道具有封闭、视线差、空间小、救援困难等特性,一旦发生交通事故,整条公路隧道的通行能力和安全性都将受到影响,对生命和财产安全的威胁更大,因此提高隧道的安全预警和处置能力显得尤为重要。
隧道安全预警系统,结合隧道独特的地形环境,利用激光检测术与数字图像技术,实现隧道内运动车辆自动检测、运动状态检测、交通事件检测等目的,实时监测隧道内车辆数据变化,对车辆滞留、拥堵、变道等交通事件的检测,“两客一危”车辆驶入驶出提醒,实时上传交通流量调查数据,并自动记录相关数据。能够准确、快速地对交通异常和交通事件进行检测及预警,实现隧道安全的有效管控。
1 隧道安全需求分析及系统设计
公路隧道内的安全事故的发生,绝大多数伴随着重大的生命和财产的损失,特别是高速公路的隧道路段,对于隧道的安全预警需求更加急切,主要包括以下几点:
①隧道内部车辆信息实时了解,以视频、数据等多方位展示实时隧道内交通情况;②隧道内发生的交通事件准确、及时上报,对车辆事故或雨、雪、雾等恶劣天气造成的车辆滞留第一时间上报并预警提示;③“两客一危”特殊车辆重点关注,客车与危险品车的隧道通行状态掌握。
基于上述分析,本系统通过安装在隧道入口和出口的前端数据采集设备,主要包括扫描式激光车检器、摄像机等,采集隧道内车辆通行的数据信息,经过系统后台软件分析并处理,实现的主要功能包括:①隧道数据实时监测:实现隧道实时容量变化监测、实时平均车速变化监测、实时车型占比变化监测等,监测信息实时显示在中心服务器上,方便值班人员对隧道内实时信息了解;②事件监测与上报:车辆滞留监测、拥堵监测、车辆隧道内变道监测、“两客一危”车辆监测,系统监测到交通事件时,在中心服务器上醒目的区域显示事件内容,并控制隧道入口的情报板显示警示信息,预防二次事故的发生;③交通流量调查统计与数据分析:统计交通流量情况调查数据,形成隧道全年流量变化及分布趋势,为决策者提供数据支持。
1.1 系统设计
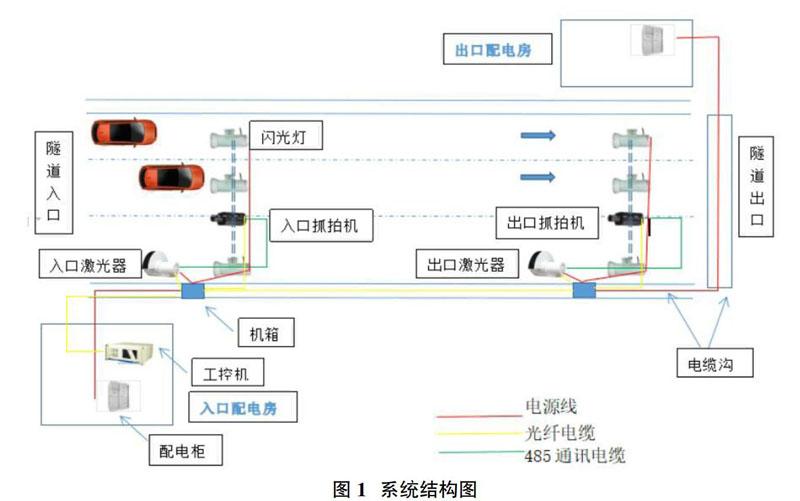
系统的主要结构如图1所示,由入口激光式扫描传感器和抓拍相机、出口激光式扫描传感器和抓拍相机、工控机、补光灯、交换机、无线传输模块、中心服务器等组成。扫描式激光传感器安装在隧道内顶部,抓拍相机和补光灯安装在现有支架上,激光传感器器在抓拍机前面一定距离处,该距离与抓拍相机的最优抓拍距离有关。隧道的入口和出口处均安装一个激光传感器和一个抓拍相机,车辆先通过入口的激光传感器扫描区域,经过入口抓拍相机下方,然后通过出口的激光传感器和出口的抓拍相机。入口的激光传感器与抓拍相机用通讯线连接,出口的激光传感器与抓拍相机同样用通讯线连接,且入口和出口的激光传感器和抓拍相机通过网线连接到機柜中的交换机上,工控机接入内部网络,通过与入口和出口的激光传感器和抓拍相机交互信息确定隧道内车辆车型、流量等信息,并将数据经过传输模块发送至中心服务器。
1.2 系统运行原理分析
1.2.1 系统工作原理
系统工作原理如图2所示,扫描式激光传感器实时采集道路上数据信息,当入口激光传感器检测到车辆进入时,发送抓拍指令给入口抓拍相机进行抓拍,激光传感器确定车型后向工控机上传车型信息,抓拍相机抓拍车辆图片后进行车牌和车牌颜色识别,并把车辆图片、车牌号和车牌颜色上传工控机,工控机上的后台软件接收到这些数据信息后进行入口车辆信息匹配和存储;当出口激光传感器检测到车辆进入时,发送抓拍指令给出口抓拍相机,激光传感器确定车型后向工控机上传车型信息,抓拍相机抓拍车辆图片后进行车牌和车牌颜色识别,并把车辆图片、车牌号和车牌颜色上传工控机,工控机上的软件在接收到数据信息后进行出口车辆信息匹配,同时将入口车辆信息与出口车辆信息进行对比匹配,确定车辆进出隧道的时间、平均速度等,进而实现对隧道内的车辆通行状态掌握、交通事件监测以及数据分析。
1.2.2 车型检测原理
激光扫描测距的技术是专门为获取物体的三维信息而发展起来的一门新兴的立体测量技术,激光扫描测距传感器利用激光脉冲飞行时间的基本原理测定被测物的距离,脉冲激光束通过激光扫描测距传感器内部的旋转反射镜,以固定间隔的角度和时间进行扫描,对周围环境扫描出一个扇面,目标物体的轮廓线由接收到的一系列脉冲序列来决定。基于此原理,可以对车辆的轮廓进行扫描,获取车辆的外型特征数据(如图3所示),进而进行车辆分类,具有设备分型精度高、抗干扰能力强等特点,且对“两客一危”的车辆能有效识别。
1.2.3 车辆出入口匹配原理
在入口和出口设备采集到车辆信息并上传至工控机后,得到入口和出口车辆的车型、车长、车宽、车高、车速、车道号、车牌号、车辆图片、驶入/驶出时间等信息。将车辆信息分以下2类:①有车型信息且有车牌号——车检器出车信息、抓拍信息均有上传,且抓拍信息中车牌号提取成功;②有车型信息无车牌号——车检器出车信息、抓拍信息均有上传,抓拍信息中车牌号未成功提取。
正常情况下出入口车辆信息匹配,正常情况指的是,入口和出口车辆信息均包含完整且准确的车牌信息和车型信息,即均为类①。此时的出口与入口信息匹配时,以如图4所示的方法处理。
异常情况下出入口车辆信息匹配,异常情况指的是,入口和出口车辆信息至少一个不为类①,即此时匹配时将车牌号不再作为参数参与匹配,主要以车辆信息的长、宽、高、车型特征点、驶入驶出时间等信息匹配。
1.2.4 车辆滞留检测原理
隧道入口检测到车辆驶入,设备上传车辆采集信息(车牌号、驶入车道号、车辆长宽高、车速),记录车辆驶入时间,将车辆加入隧道车辆池。隧道出口检测到车辆驶出,与入口类似记录车辆采集信息和驶出时间,将车辆信息与隧道车辆池匹配,并从车辆池中移出。系统定期检测隧道内车辆池中的车辆,判断其是否存在超时未驶出的情况,若有,则认定车辆滞留在隧道内,记录车辆滞留信息并发出滞留提示,同时控制警报灯开启,提醒工作人员注意隧道内情况。当滞留车辆驶出隧道后,系统会记录车辆驶出信息。如图5所示。
1.2.5 车辆变道检测原理
系统记录车辆驶入时刻和驶出时刻的所在车道号。当车辆驶出隧道时,将车辆信息与隧道车辆池匹配,找到该车的入口信息,比对驶入、驶出的车道号,判断车辆在隧道内发生变道动作。
2 系统运行效果
2.1 中心服务器软件界面
中心服务器软件功能齐全、综合性强,展示界面及功能区域如图6所示。
软件可实时显示隧道内车辆数量与各车型分布情况,实时计算隧道内通行指数,并显示隧道内容量变化曲线和平均车速变化曲线,了解隧道内通行能力和状态,以及交通事件检测通知,显示隧道内发生的车辆滞留、拥堵、“两客一危”车辆的驶入驶出状态等。
2.2 事件检测预警
软件实时检测隧道内交通事件并发出预警提示,预警时预警信息显示区会闪缩,同时将会以不同的颜色提示不同的预警信息,在桌面右下角弹出告警提示框,并控制声光警报设备提醒中心值班人员。如图7所示。
事件检测预警信息分为如下几种:
2.2.1 阈值事件检测
当隧道内车辆总数或某车型车辆总数超过隧道设置的阈值容量时,则会进行告警。
2.2.2 滞留事件检测
当某一车辆在隧道内滞留的时间超过设置的阈值,则会进行告警,告警时将会上传车辆的抓拍图片。当该车辆驶出隧道后,同时会收到该车辆驶出的提示信息。
2.2.3 变道事件检测
当车辆驶入和驶出隧道时的车道不一致时,会接收到预警信息以及车辆的抓拍图片。
2.2.4 “两客一危”车辆检测提醒
当中型客车、大客车以及危化品车驶入和驶出隧道时,系统会在提醒区显示车辆信息以及图片,并做数据存储,如图8所示。
2.3 数据持久化
对隧道内交通事件检测数据、流量数据、“两客一危”提醒数据等进行本地持久化,提供数据查看功能。
该项目自河北承德实施运行一年时间,在运行期间准确预警了承德五道岭隧道发生的3起车辆滞留事件,1起交通事故,事件均能实时发现和完整取证,有效提高了隧道安全预警反映能力,帮助高速管理工作人员在发生交通事件时了解隧道内车辆信息,提高隧道交通处置能力,且针对“两客一危”车辆的识别精度达到80%以上。
3 数据分析
系统运行期间的运行数据可通过中心服务器软件查询,分析数据可得到以下结果:
3.1 隧道容量分析
分析隧道容量数据可知晓隧道每天不同时刻的车辆通行量及实时的通行峰值,了解隧道通行容纳能力。
图9为通行状态良好时某隧道容量一天的变化曲线。可了解到:该隧道容量變化呈正态分布趋势;当天隧道内车流高峰时车辆数最多达到约为35辆;高峰期在8:00-11:30,13:00-18:00。7:00开始容量呈阶梯上升趋势,18:00后容量呈下降趋势,且在22:30左右有短暂起伏变化。
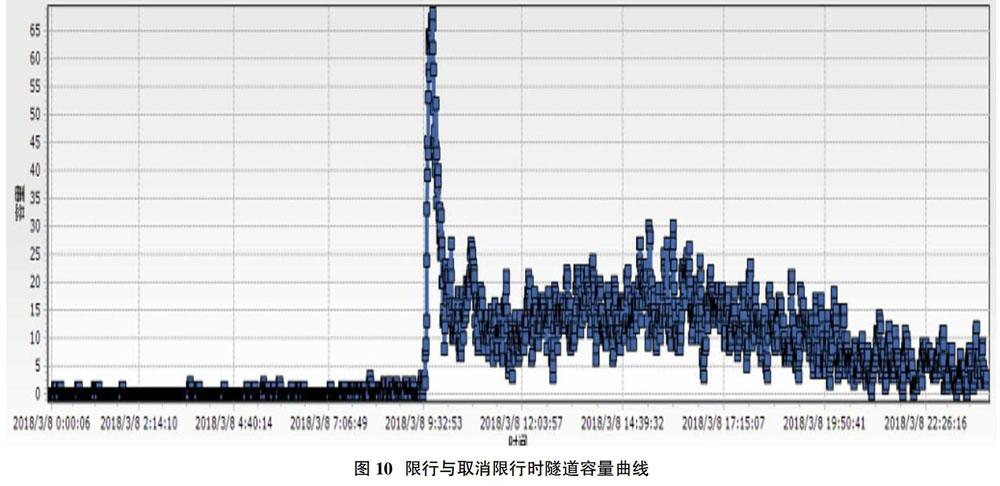
图10为雾天限行情况下隧道容量一天的变化曲线。可了解到:9时左右隧道容量开始急剧上升,取消限行后隧道瞬时容量接近70,高峰时间约为9:30;9:30之后容量呈下降趋势,并趋于正常状态。
图11为检测到隧道内发生车辆大量滞留时,当天的隧道容量变化曲线。可了解到:隧道内发生车辆滞留时间段为7:30-12:30,高峰时容量达到180辆,12:30之后隧道通行恢复正常;滞留车辆数急剧上升时间点为7:24左右。
3.2 隧道流量分析
分析隧道路段的流量数据,可了解隧道路段全天、全年车流量信息,以及各车型占比、“两客一危”车辆数据等。
图12为隧道流量按天检测的变化曲线。可了解到:该隧道通行车流量变化呈正态分布趋势;隧道内车流高峰时5分钟统计流量最多达到约为500辆;高峰期在8:00-11:30和13:00-18:00。9时和15时左右达到峰值,且在22:30左右有短暂起伏变化。
4 结束语
通过隧道安全预警系统,对隧道内车辆信息和数据的掌握,及时检测隧道内发生的交通事件,对“两客一危”车辆的驶入驶出关注,并统计隧道全天候的容量与流量数据,不仅提高了对隧道的有效管控,为决策者提供有效的数据支撑,而且能在第一时间知晓隧道内发生的交通事故和事件,快速提醒人员介入处理,还能提供隧道内车辆详细数据,提高事故救援能力和效率。
参考文献:
[1]陈贤杰.基于事件检测的隧道安全预警系统的设计和应用[J].广东公路交通,2017,43(04):110-112.
[2]汪心渊,郑奇,吴晨.隧道防二次事故综合安全预警系统研究[J].浙江交通职业技术学院学报,2016,17(03):20-24,54.
[3]江迪新.面向隧道安全的多普勒雷达及全景视频联动预警系统[J].交通节能与环保,2015,11(05):82-85.
作者简介:钟秋(1970-),男,重庆人,高级工程师,主要研究方向为交通工程。