应用FMH模型的城市高分辨率遥感影像道路提取探究
2020-08-07
(武汉市洪山建设投资有限责任公司,湖北 武汉 430000)
一、发展现状
遥感可以通过非接触式传感器或卫星获取有关地球上物体的信息。随着遥感卫星和传感器的快速发展,遥感影像的分辨率越来越高。道路是遥感影像记录的典型人工地物之一,道路提取在城市规划和交通运输中起着至关重要的作用。高分辨率城市影像中的道路以密集分布的结构规则为主要特征,在遥感影像中,它是一条具有特定宽度和灰度的直线带。
近年来,从高分辨率遥感影像中提取道路信息的理论和实验研究得到了极大的发展。美国怀俄明州立大学教授Naveen Chandra提出了一种基于认知视角的道路网络提取方法,能够检测出道路的主要部分、弯曲区域和交叉点。东华理工大学安丽等人引入了一种多特征稀疏模型来表示目标道路的外观,采用一种新的稀疏约束正则mean shift算法道路跟踪,具有良好的准确性。此外,阈值分割和数学形态学在道路区域提取中都起到了很好的作用。模糊C均值也适用于道路提取,中科院遥感所博士徐超利用Hough变换从高分辨率影像中提取道路信息,因为大多数城市道路是直的。
本文提出一种新的城市道路提取模型。该模型采用模糊C均值、形态学和Hough变换,称之为FMH。在对影像预处理后,采用模糊C均值算法将影像分为道路部分和非道路部分。对结果进行侵蚀操作,去除非道路部分,将局部Hough变换应用到子区域中提取道路特征。最后,采用扩张和细化相结合的方法将断裂的部分连接在一起,获得更好的可视化效果。
二、研究方法
基于高分辨率遥感影像的城市道路提取模型FMH使用的算法,技术流程如图1所示。
(一)模糊C均值聚类(FCM)

图1 技术流程图
聚类是一种非监督的分类模式。模糊C均值聚类,又称模糊ISODATA,是一种常用的聚类方法。隶属度函数表示属于集合A的任何对象X的程度,其范围在0~1之间。对于每个类别,所有样本都可以定义为一个特定的模糊集。FCM算法可以最大限度地提高同一类别中元素的相似度,同时最小化不同类别中元素的相似度。
模糊C均值聚类的隶属度函数表示每一类样本的隶属度。该算法将n个向量划分为c个模糊群。当判别函数最小时,可以得到每个模糊群的聚类中心。判别函数是:


每个类中xj的总成员函数等于1:

通过计算可以得到使式(1)最小化的必要条件:

算法的过程是迭代修改聚类中心和隶属度函数。当判别函数小于设定值或保持不变时,得到聚类结果。
(二)数学形态学
在模糊C均值后,将影像分为道路和非道路两部分。然而,聚类是根据灰度进行的。大量的车辆、屋顶等地面物体也有与道路相似的灰度,其中许多被归为公路类,所以需要进一步处理非道路区域。采用数学形态学是因为道路的形态特征比较明显。
数学形态学利用影像的形态和结构特征处理影像。它具有简单、处理速度快等明显优点。数学形态学算子可用于优化影像的原始数据。该功能包括保持它们的基本形状特征,并详细排除一些不相关的结构。经过适当的形态学处理,道路区域将变得更加完整。形态扩张定义为:

形态侵蚀定义为:

f(x,y)表示灰度影像,b(x,y)表示指定的结构元素,Df和Db表示它们的定义域。
选取一定长度的直线基元路面作为结构元素,对聚类后的影像进行侵蚀。
提取线元素后,道路区域形状不规则,还有一定程度的骨折。为了平滑道路区域和连接道路裂缝,可以再次使用线元素放大影像,通过八度模板匹配方法实现形态细化,最后得到单像素宽度的道路信息。
(三)局部Hough变换
在对原始数据进行模糊C均值聚类和数学形态学处理后,仍然存在大量的非道路区域。Hough变换用于提取道路区域直线特征的直线基元。Hough变换是从数字影像中提取直线的经典算法,基本原理是利用点和线的对偶性将影像维数中的每一点转化为参数空间中的曲线。如果影像维度中的某些点共线,则它们在参数空间中的相应曲线在某个点处相交。同样,在参数空间中的同一点相交的所有曲线对应于影像空间中直线上的点。
在影像空间中,一条直线可以由参数方程(7)表示。直线如图2所示:

从参数方程可以看出,直线上的任何点(确定值和θ)对应参数空间中的正弦曲线。影像空间中同一直线上的点与参数空间中许多正弦曲线的交点映射。也可以说,参数空间中的交点对应于影像空间中的唯一直线。
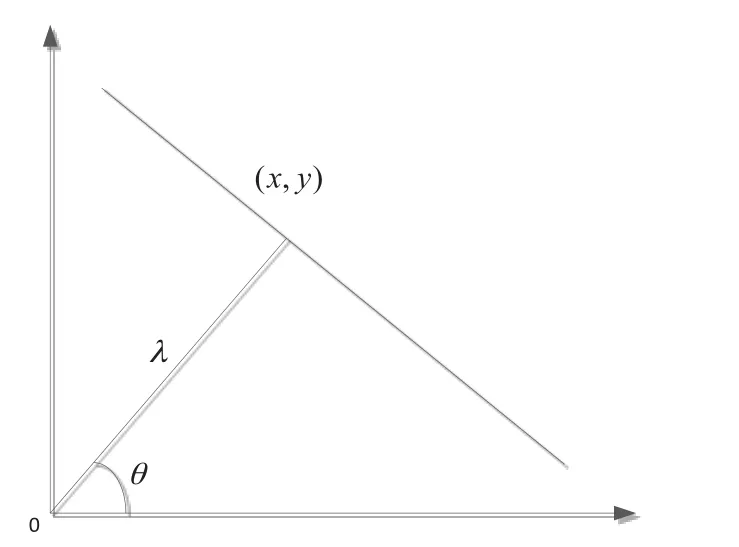
图2 直线的极坐标
Hough变换的核心是通过局部模式(a点)的识别来实现影像全局模型的提取。与其他线性检测方法相比,Hough变换具有明显的优势。Hough变换特别有效,即使影像上的目标点是稀疏的。
Hough变换在处理遥感影像时具有良好的抗噪声和抗断裂能力。然而,并不是所有的道路都能穿透整个影像。如果在整个影像中使用Hough变换,将检测到与某条道路在同一条线上的一些非道路点或噪声。另外,在整个影像中道路长度不相同的情况下,需要设置提取直线的阈值。较小的阈值可能会导致大量非道路点混合在一起。但如果门槛太大,只会检测出几条较长的道路,剩下的道路将被移除。因此,对影像进行整体Hough变换很难取得良好的效果。
在这种情况下,利用局部Hough变换完成道路的提取。首先,整个影像被分割成一些小窗口。为了保证线段的完整性,窗口之间存在一定的重叠。然后逐个迭代扫描,根据阈值对每个窗口进行Hough变换。最后,合并每个窗口的结果以获得路线图。这样,在每个子窗口中都可以检测到长距离的道路,并且可以消除远处共线噪声的干扰。
三、实验结果
(一)实验数据集和参数设置
基于两景2019年5月拍摄的2m分辨率高分一号卫星影像(命名为影像1和影像2)。两幅影像的大小是540像素×540像素。在图1中,道路几乎是垂直和水平的。这幅影像的其他地面物体包括大量的居民楼和绿化带。然而,影像2的道路并非都是水平或垂直的。除了图1中的非道路对象外,图2中还有一条河从上到下横穿。参数设置如下。在FCM聚类中,类别c的个数设为3,权重系数m设为2。在形态侵蚀中,0。和90。方向均采用长3个像素、宽1个像素的直线模板,操作次数是5次。在局部Hough变换中选择的子窗口的大小为270像素×270像素,阈值为150像素。膨胀模板与侵蚀模板相同,操作的次数是10次。
(二)结果分析
图3中的影像显示了我们的模型基于图1的处理过程。图3中(a)为原始全色影像,(b)为灰度化和直方图均衡化的结果,均衡后,道路与其他地物的对比度增强。(c)为对(b)实施模糊C均值聚类后的影像二值化的结果。在二值化影像中,道路类别为白色,其他两个类别为黑色,除道路区域外,还有其他地面对象也被分类为道路类别。在不同方向的线路侵蚀和组合结果后,大量的非道路区域被移除或削弱,如图3(d)所示。利用局部Hough变换提取每个窗口中的长线段。图3(e)所示为已移除非道路区域的提取道路区域。对于上述结果,执行行扩张操作,(f)所示为扩张道路,道路区域的孔洞被填满,破碎的道路在一定程度上连通。最后,对放大后的影像进行形态学细化,(g)所示为仅具有一个像素宽度的道路提取结果,提取的结果与(h)所示的原始影像叠加。

图3 基于图像1的城市道路提取结果
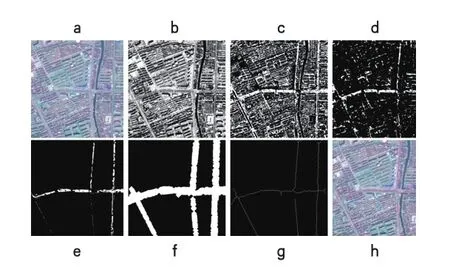
图4 基于图像2的城市道路提取结果
图4中的影像通过处理影像2的过程。尽管有些路段成了曲线或断裂。对影像2全过程处理后,提取出主要道路的信息。通过对两幅不同影像的处理,可以看出新模型具有很好的道路提取效果。
四、结语
本文提出了一种新的基于FMH城市高分辨率图像道路提取模型。该模型包括模糊C均值、形态学和局部Hough变换。经过预处理后,利用道路的灰度特征进行模糊C均值聚类,将图像分为道路区域和非道路区域。然后,通过形态侵蚀和局部Hough变换去除非道路区域并提取道路区域。最后,进行形态扩张和细化操作,将断裂的部分连接在一起,以获得更好的可视化效果。实验证明了该FMH模型的有效性。
