基于改进拉格朗日海洋学模型的AUV运动仿真研究
2020-08-01谭小波于立婷
解 羽,谭小波,于立婷
(沈阳理工大学 信息科学与工程学院,沈阳 110159)
近年来,世界各国对水下通信技术、自主式水下航行器技术[1]、水下移动模型开展了多方面的研究。由于水下节点移动性、水声信道传输质量低等特点,传统陆地上的路由协议无法适用于水下,因此许多学者逐渐开展水下自组织网络路由协议的研究。在路由协议设计之前,需要对自主水下潜航器(Autonomous Underwater Vehicle,AUV)的移动状态进行分析,并建立合适的AUV移动模型,再根据AUV的移动规律寻找AUV间的相遇机会,进而完成数据转发。
水下移动模型的设计为水下自组织网络[2]路由协议设计提供重要依据,设定不同的移动模型会产生对应的网络拓扑结构。拓扑结构的变化能够影响数据包下一跳的选择,进而对网络中节点的传输性能产生较大影响。因此,移动模型的设定是水下自组织网络路由协议设计的重要前提之一。AUV是综合了人工智能和其他先进计算技术的水下移动模型之一,同时也是水下移动自组织网络的重要组成部分[3]。因为其具有不受电缆束缚、水下作战和作业具有超高的灵活性[4]等特点,在军事和民用领域得到了广泛的应用。
拉格朗日海洋学模型(Lagrange Oceanographic Model,LOM)可以描述二维海洋环境中水下AUV节点运动状态的移动模型,因其充分考虑二维海洋环境下海流因素对AUV移动的干扰,使AUV运动模型更加贴合海洋的实际情况[5]。但该模型也存在一定缺陷:水下AUV节点局限于二维海洋环境,且仅考虑海流这一影响因素,未考虑到其他海底障碍物等。
水下避障就是当AUV检测到周围出现障碍物时,能以最快的时间和最小的成本成功避开,然后按照原定路线继续前行。Ming等[6]提出了一种新的自适应蚁群优化和基于粒子群优化融合的模糊规则优化算法,该算法可以实现 AUV在复杂水下环境中的智能路径规划。Pan等[7]为提高遗传算法寻找最优避障路径的效率和精度,提出遗传蚂蚁混合算法,通过该算法可缩短寻优时间,提高算法效率。但模糊逻辑算法、粒子群算法均存在较高的复杂度,模糊逻辑算法具有偶然性,因此水下避障的准确度不高。
针对上述两点缺陷,本文提出一种适用于水下三维环境的AUV移动模型,即基于改进拉格朗日海洋学模型(Improved Lagrangian Oceanographic Model,I-LOM)的AUV移动模型。由于传统移动模型考虑海洋环境过于理想化,I-LOM模型通过对拉格朗日海洋学模型的改进,将传统的二维海域研究扩展为三维海域研究;同时人工势场法具有简洁的算法结构且计算速度快,因此利用人工势场法对水下障碍物避障。通过对LOM移动模型的改进,构建更加符合水下环境要求的移动模型,为水下自组织网络路由协议设计提供重要依据。
1 I-LOM移动模型
水下移动自组织网络是由若干自主式水下机器人AUV组成,为研究水下移动自组织网络的形成,建立合适的AUV数学模型是研究AUV运动的关键,AUV的数学模型也是研究水下移动自组织网络动态拓扑的依据。
拉格朗日海洋学模型是一种理想环境下描述海洋环境中水下传感器节点运动状态的二维水下移动模型,在AUV工作的实际情况中,存在海底障碍物等多种干扰因素。因此首先对该模型的二维海域的限制做出改进,将其提升为三维海洋学运动模型;其次,考虑如鱼群、石礁等海底障碍物对AUV运动的影响,提出采用人工势场法改进拉格朗日运动学模型,将海域的海洋环境更加实际化。
1.1 AUV运动状态方程
通过动力学知识对AUV的运动状态进行深入分析,为使建立的模型更具有效性且适应度更高,本文假设动坐标系原点O与AUV的重心G不重合,由动量定律可知B=mV,B为AUV的动量,不考虑相对论效应的情况下,m为AUV的质量。因此,AUV的速度可以表示为
v=v0+φRG
(1)
式中:v0为AUV在静坐标系下的速度;RG为重心G的矢径;φ为重心对于动坐标系原点O转动的角速度,由于AUV为刚体,AUV上各个点转动的角速度相同。
描述AUV在静坐标系下的运动时,可得到动量定律与力的关系,如式(2)所示。

(2)
式中F∑代表AUV所受各个方向的合力。
为研究AUV的运动状态方程,将对决定AUV旋转角度的动量及动量矩进行动、静坐标系的转换分析,定义AUV动量为向量B,AUV动量矩为向量L,在AUV运动过程中,动量与动量矩随时间的变化而变化,由此可得
(3)

(4)

综合考虑公式(1)、(2)、(3),可以推导出AUV的空间平移运动方程,如式(5)所示。
(5)
同样,对于AUV的空间旋转运动方程的研究,将利用动力学中动量矩公式,如式(6)所示。
L=RG×mv+Iφ
(6)
式中I为AUV重心不在静坐标系原点的惯性矩阵。描述AUV在静坐标系下的运动时,可以得到动量矩定律与力矩的关系,如式(7)所示。

(7)
式中M∑表示AUV受各个方向的合力矩。
综合考虑式(4)、(6)、(7),可以推导出AUV的空间旋转运动方程,如式(8)所示。
(8)
1.2 拉格朗日海洋学模型维度提升
传统拉格朗日海洋学运动模型针对二维海域海流的影响进行建模,AUV节点存在一定局限性。在某种特殊的海洋环境下,AUV在指定海域内进行自主式移动时可能受到海洋涡流的影响,在竖直方向上存在位移,因此将海洋涡流作为竖直方向上对AUV移动的干扰建立模型,改进传统的只考虑二维海流情况的拉格朗日海洋学运动模型,将其扩展成考虑海流、涡流情况的三维拉格朗日海洋学运动模型,海洋涡流的形态近似于圆锥螺旋线,自圆口向锥底流入,考虑涡流的形成对AUV运动轨迹的影响,将涡流曲线转换成圆锥螺旋线进行建模,如图1所示。

图1 圆锥螺旋线示意图
模拟海洋涡流的圆锥螺旋线方程如式(9)所示。

(9)
式中:V=(Vx,Vy,Vz)表示AUV在动坐标系下的速度向量;φ表示AUV的角速度,AUV的各个转动的角速度相同。
将(9)式带入拉格朗日海洋学模型,推导出受海流与涡流影响的三维曲线方程,如公式(10)所示。
(10)
式中:F表示AUV移动的曲线宽度,F的计算公式为F(t)=A+εcos(ωt),ε表示海流场的振幅,ω表示海流场的频率;k为单位空间内涡流、海流交换的次数;c为y方向上的位移速度系数;t为经过单位空间内的时间;s代表AUV与涡流、海流之间的距离;γ(φ,t)、z(t)分别为曲线的三元方程,联立后可得到受海流与涡流影响的三维曲线方程。
三维海洋环境下AUV的速度计算公式如式(11)所示。
(11)
式中:Vx、Vy、Vz分别表示在动坐标系下x轴、y轴、z轴的速度分量。
每个AUV在三维海洋涡流、海流环境下的拉格朗日运动轨迹如式(12)所示。
L(φ,t)=-γφ(φ,t)
(12)
1.3 拉格朗日海洋学模型避障策略
人工势场算法(APF)是对移动运行环境的一种抽象描述,这种移动平台下大多为机器人、汽车以及本文中所研究的AUV等[8]。人工势场法的原理是在障碍物四周和不允许AUV 进入的区域生成斥力势场并对其产生斥力,在希望AUV进入的区域对其产生引力。叠加的势场合力可使AUV自主运动,且有效的避免与障碍物的碰撞以及规划航行路线最终到达目标区域。AUV在人工势场中受到的作用力如图2所示。
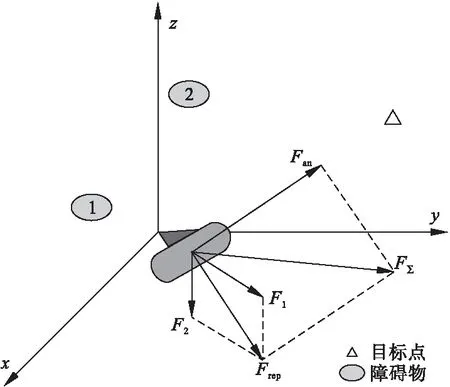
图2 人工势场法受力分析图
为简化问题的研究,本文将在大海中的AUV看成一个质点q,忽略其形状与大小, AUV在引力场与斥力场的共同作用下,产生的合力场表示为
U(q)=Uatt(q)+Urep(q)
(13)
式中:U(q)表示总势场;Uatt(q)表示目标对AUV的引力;Urep(q)表示障碍物对AUV的斥力场。
产生的合力为合力场对距离的导数形式,合力可表示为
F(q)=-U(q)=Fatt(q)+Frep(q)
(14)
1.3.1引力势函数
目标点对AUV存在一个引力作用,引力的大小和AUV与目标点的距离有关,常用的引力场函数为
(15)
式中:ε0表示引力增益系数;ρ(q,qa)表示AUV当前位置与目标点的距离。
由引力场函数推导引力函数,引力为引力势场对距离的导数,引力函数为
Fatt(q)=-Uatt(q)=ε(q-qa)
(16)
1.3.2斥力势函数
障碍物对于AUV存在一个斥力的作用,障碍物附近对存在一个斥力场,斥力的大小与障碍物与AUV之间的距离相关,斥力场函数为
(17)
式中:μ为斥力增益因子;ρ(q,q0)为AUV与障碍物的距离;ρ0为每个障碍物的影响半径。
由斥力场函数推导斥力函数,斥力为斥力势场对距离的导数,斥力函数为
Frep(q)=-Urep(q)=
(18)
1.3.3人工势场法改进AUV运动 状态方程
在虚拟的势场力作用下AUV所受合力为
(19)
式中F∑为AUV实际受到的物理合力。
由式(5)、式(19)得,受人工势场力下的AUV平移运动状态方程如式(20)所示。
(20)
人工势场算法通过虚拟的势力场对AUV移动产生一定作用,使AUV的移动朝着目标方向靠拢,远离障碍物方向。通过在合力作用下的AUV平移、旋转运动方程的重新推导,将虚拟势场力的影响加入物体实际受到的物理合力中,在一定程度上实现了对水下各种障碍物的避障策略,避免AUV与障碍物的碰撞。
1.4 I-LOM移动模型的建立
首先对拉格朗日海洋学模型的适应海域做出三维转换,随后采用人工势场算法对水下障碍物进行避障,构建出I-LOM移动模型。I-LOM移动模型的建立过程如下。
首先,在人工势场合力作用下,结合改进的拉格朗日海洋学模型,综合式(10)、式(20)得出I-LOM模型下的AUV平移运动方程为

(21)
同理,综合式(8)、式(10)得出I-LOM模型下的AUV旋转运动的方程为

(22)
通过式(21)、式(22)的AUV空间平移、旋转运动的表达式,可以推导作用在AUV上的合力投影到动坐标系各坐标轴上的表达式,即为AUV每个自由度的平移和旋转运动方程。
AUV各自由度的平移运动方程为

(23)
同理,AUV各自由度的旋转运动方程为
(24)
2 仿真验证与结果分析
采用Matlab仿真软件对I-LOM移动模型进行仿真。仿真场景是2000m*2000m*2000m的三维水下自组织网络,向目标海域布放20个AUV以实现网络全覆盖。假设水下环境中,同一深度的温度、盐度不会发生变化,并采用真实的温带地区的海洋温度、盐度数据作为标准,模拟真实的水下参数值。
图3为LOM移动模型和I-LOM移动模型在z轴移动轨迹对比。

图3 AUV在z轴上运动轨迹仿真比较
通过观察海洋中AUV的移动变化,I-LOM移动模型中的AUV运动轨迹变化更加贴近水下的真实环境。在I-LOM移动模型中,考虑到AUV同时受洋流、涡流等因素影响的乱流现象,因此呈现出非周期性的复杂运动,能够反映出更加真实的水下AUV运动情况。而LOM移动模型呈现出单一的洋流波动状态,处于理想的水下环境中,不能较好地反映出水下节点复杂的运动情况。
图4为三维水下AUV移动轨迹

图4 三维水下AUV移动轨迹
由图4可知,将海洋涡流作为竖直方向上对AUV移动的干扰建立模型后,三维水下AUV移动轨迹呈现不规则的运动情况。改进后的拉格朗日运动模型与传统的拉格朗日运动模型在x轴、y轴方向的运动轨迹一致,在z轴方向上以近似圆锥曲线建模,对模型进行维度优化,证实了升维优化后的拉格朗日海洋学运动模型的可用性与合理性。
对海洋中可能出现的鱼群、石礁等水下障碍物的采用人工势场算法进行避障优化,水下节点AUV运动变化情况如图5所示。

图5 I-LOM移动模型仿真效果图
由图5可知,以“米”字型为代表的水下节点可以有效避开系统设置的多重模拟障碍。并按照自身的任务驱动从原地点(0,0,150)向目标点(10,10,0)移动,基本实现AUV的智能避障。
3 结束语
模拟AUV所受的海洋环境,从提升海域维度、水下障碍物避障两个方面对现有AUV移动模型进行改进。仿真结果表明,采用I-LOM移动模型的AUV实现了在三维水下自组织网络的运动轨迹监测,且基本实现智能避障功能。I-LOM移动模型的设计为水下自组织网络路由协议设计提供了依据。
