基三维空间测量的水保、环保核查比对方法研究
2020-07-31韩利张庆霞王一波李晔秦鹏刘启飞
韩利 张庆霞 王一波 李晔 秦鹏 刘启飞
摘要:为提高输电线路工程项目验收中环保和水保核查的效率,采用传统的人工验收已经不能满足工程验收的要求。由此,针对该需求,提出一种基于三维激光扫描的环保、水保核查比对方法。首先,通过无人机三维激光扫描系统实现对输电线路环保的采集;然后通过数据的预处理,实现对点云数据的分类,并引入基于Hough变换与相似度原理的检测方法,实现对验收工程项目周边环境缺陷的检测;最后搭建软件测试平台,对上述方法进行测试。结果表明,上述方法可很好的实现输电线路周边环保的可视化展示,从而为项目验收提供了更多的参考。
关键词:三维激光扫描;点云数据;环境缺陷检测;可视化
中图分类号:TM835
文献标识码:A
文章编号:1001-5922(2020)07-0046-04
目前,我国关于项目验收中虽然出台了相关的技术规范与标准,但大部分都是些总体性的要求,缺乏具体的规定或技术标注,而不利于项目验收中的各项指标确定,从而导致在环保、水保验收中很多环境要求无法得到落实。同时,传统环保和水保核查验收中,通常通过人工勘查的当时,但对于一些比较偏远的电力项目,则很难实现人工勘查。因此,这就要求结合信息技术。一方面通过现代信息技术解决人工勘查难题,另一方面是提高无人机在电力项目环境验收中图像的清晰度。因此,引入三维激光雷达系统,通过激光点云实现对数据的采集。
三维空间测量的环保、水保核查具体思路
1当前针对电力系统的环保、水保核查方面,很大部分是依据传统的人工进行核查,这种方式不仅排查难度大,同时非常耗时。因此,采用三维激光雷达系统进行电力项目的环保、水保核查,是当前项目验收的重要途径创新。对此,本研究在采用激光雷达三维测量完成对图像采集,经数据预处理,并通过一定的图像匹配算法,找出项目验收中环保与水保不符合要求的地方,从而为当前项目验收提供信息化的处理方式。
2激光雷达的数据采集
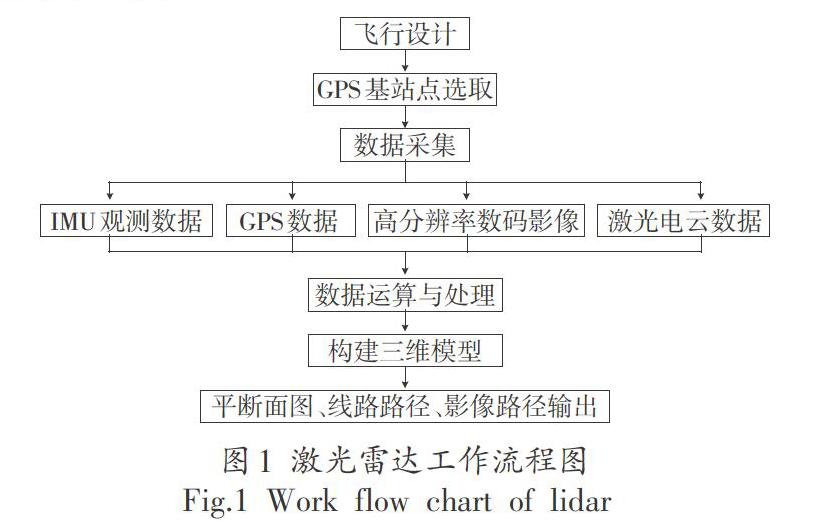
激光雷达(LiDAR,Light Detection And Ranging)作为一种新型的测量系统,主要依据激光测距、差分GPS等技术进行三维坐标数据测量,进而生成LiDAR数据影像,得到数字高程模型。因此,依据该技术,将电力项目验收的环保、水保核查流程设计为如图1所示。
从图1中看出,实现电力项目的环保、水保验收,主要是依据激光雷达测量系统对图像的采集。通过数据运算构建环境的三维影像图像,并进行图像的预处理和输出。
3数据预处理
在完成以上数据采集后,则需要对数据进行预处理、校验和激光点云数据分类,以此为后续的图像检
测提供更为高质量的图像。
3.1激光点云预处理
激光数据预处理主要涉及定位、坐标转换等。在定位过程中,则需要利用到GPS数据以及其他的参数。预处理的具体过程如下所示:
1)数据定位。首先分离GPS数据与IMU数据,然后将前者应用到定位解算中。在本次定位中主要利用了双差分定位技术提高数据的精度。
2)数据定向。在定位后对激光扫描仪的坐标进行计算,本研究则主要利用GPS天线位置的坐标。具体所需要的数据包括:厂商提供的IMU、激光扫描仪相对位置数据、IMU偏心分量数据,实测得到的GPS天线偏心分量。在此基础上,根据各个激光点的坐标完成对点云文件的定向过程。
3.2数据检校
数据检校的参数主要有航偏角(Heading)、翻滚角(Roll)等4个参数,需要结合Lidar数据、地物等实现校正。具体的过程如下所示。
1)翻滚角(Roll)校正。首先需要获取两条处于对向飞行的航线,然后对点云样本横断面两侧航线的高差(d,d)进行测定,同时得到二者之间的距.离(swathvidth)。翻滚角的校正值Ar计算公式如下所示:
公式(1)中,d=(d,+d)/2。经过处理后将点云数据处于扫描方向的横断面实现了重叠。
2)俯仰角(Pitch)校正。在校正Pitch值的過程中,主要根据如下公式计算对应的改正值(Ap):
公式(2)中,AGL代表航高;d代表航线间的区别。经过上述校正后,实现了点云数据在尖顶房位置的相互重合。
3)航偏角(Heading)校正。Heading值的具体校正公式如下所示:
公式(3)中,distance代表航线地底点与重叠区域中心的距离值;d=(d,+d,)/2代表两条航线的不同。基于上述校正处理后,2条航线处于尖顶房位置实现了相互重合。
4)PES检校。在校正过程中主要取对向飞行航线的重叠区边缘,并且与航线方向尖顶房脊线保持垂直,具体的校正公式如下所示:
公式(4)中,ScanAngle代表扫描角;AGL代表航高;d代表两条航线的区别。
在具体调整过程中需要按照Heading、Roll、Pitch的顺序进行校正,如果△r、Ap、Ah、APES全部消除,则完成了检校的过程。
3.3激光点云分类
为了对各种类型的地物进行划分,需要对先前处理的点云文件进行分类处理,由此能够为之后的环境验收提供必要的信息。自动分类的详细流程如图2所示。
3.4DEM制作
在制作数字高程模型(DEM)时需要利用先前自动分类得到的数据,具体需要通过Terrascan软件来将地表类型的激光点岩数据构TIN,然后对高程点进行提取可以得到对应的DEM。
3.5DOM制作
在制作正射影像时主要利用了TerraPhoto软件,需要基于获取影像连接点的方式对影像外的方位元素进行修正,首先在各个像对中选择不少于8对均匀分布的连接点,然后根据具体情况进行修正处理。在得到修正后的外方位元素之后,结合先前得到的DEM.来获取需要的正射影像。
DOM处理技术的特征主要体现在如下方面:
1)在影像格式转换方面达到了使用的标准。
2)基于拼接技术对特殊的地形区域进行处理,以保证达到分析的要求。
3)采用匹配连接点调整方式进行处理,满足了使用的要求。
4)基于解算得到航片姿态参数。
5)影像色调保持了良好的均匀性,镶嵌边位置3灰度特征较为稳定。
3.6三维模型生成
根据之前的处理过程已经得到了DEM、DOM,在此基础上可以对三维图像进行设计,具体需要与电力工程中的线路模型等进行结合。在具体制作过程中,需要对电力线等地物进行建模,此过程中需要利用到高分辨率航片以及对应的点云设计,然后完成纹理贴图的过程。中在建模过程中可以采用不同的方法,首先是直接利用3dsmax软件实现建模的方式,即利用先前得到的点云数据进行渲染,可以对特定的剖面进行绘制,由此得到需要的规则模型;其次是基于得到的点云数据来建立三角网模型,确保模型能够在软件中独立运行。经过分析,在本次研究中采用了第一种方法完成建模过程,需要在AlatuEarth内集成铁塔和线路模型,将电业局提供的相关信息导入到数据库中,以此与三维模型进行配合应用。
4图像特征提取与匹配
在完成上述激光点云数据处理的基础上,要找到项目验收过程中存在的问题,需要对图像进行匹配和比对,从而找到项目验收过程中存在的问题。对此,本文提出采用Hough变换图像特征进行提取,然后通过相似度函数对图像进行比对。Hough变换方法主要对图像空间内的直线进行变换,可以得到参数空间内的点形式。如果处于参数空间内的直线相交于一点,则他们在图像空间内的对应点必然处于相同直线上。根据上述原理,结合参数空间的重合点数量来确定图像空间的直线特征。当参数空间内相交于相同点的直线较多时,则可以对检测的阈值进行设置,如果统计的次数高于阈值,那么可以认为在图像空间内存在对应的直线。
在图像匹配方面,建立专用的相似性度量函数,在此基础,上可以对环境缺陷进行评价。当两图像的相似度较高时,则转换到参数空间后的峰值数量等特征往往具有较高的相似度,据此可以对二者的相似度做出较为准确的评价。
5系统软件设计
5.1软件体系结构
本文设计的输电网水保与环保核查三维展示系统主要使用了C/S架构方式,即传统的客户端/服务器模式,其中客户端主要是用户操作的普通计算机,服务器则利用了数据服务器。用户通过客户端软件来进行操作,包括建库、查询、修改以及维护等操作,可以访问服务器端的信息,并获取到处理后的结果。本系统中的相关技术如下所示:
1)系统主要面向Windows平台,客户端与服务器端均为Windows平台环境。
2)基于OneMapSDI引擎来获取各系统的数据,此过程中利用了特殊的数据调度算法,满足了数据提取和应用的要求。
3)在数据管理方面利用了sQLServer数据库,建:立数据库表的方式完成对相关数据的维护。
4)系统实现过程中采用Java开发语言进行开发。5.2系统硬件与网络结构
本系统对于局域网访问提供了完善的支持,在数据通信与共享过程中利用了分级管理模式,本系统的拓扑结构设计如图3所示。
5.3系统实现
为验证上述方案的可行性,利用无人机对上述系统进行搭建。其中在输电线路点云数据采集,无人机采集三维效果示意如图4所示,在过程中,无人机主要搭载GL70激光扫描仪,其扫描频率可以达到550kHz,重量12kg,測距范围和精度分别是350m、土10mm。扫描仪中集成了惯导系统等,可以采集到更多的信息。另外,扫描仪主要搭载在Dragonr50无人机中,该类型的无人机广泛应用到了多个领域中,其连续飞行时间可达2.5h,"飞行速度可以达到80km/h,机身与最大起飞重量分别是35kg、70kg。在实验过程中的飞行距离和高度分别是30km、130m,飞行速度控制在30km/h,总计飞行时长lh。扫描对象主要是某500kV输电线路,该线路所处的地区地势较为平坦,位于线路东侧和西侧的分别是村镇和山地,线路两侧的宽度均为100m,长度为200m。
根据上述结果可知,采用基于激光雷达的线路环境缺陷检测方法具有一定的优势,不仅能够对导线一地面等多种类型的缺陷进行检测,而且可以获取到缺陷的详细信息,包括缺陷的具体位置、范围以及种类等。相对常规的检测方法,检测精度高、速度快,因此具有广阔的应用前景。
6结语
文章主要对基于无人机激光雷达的线路环境缺陷检测方法进行了研究,在研究过程中进行了相关的实验,即通过搭载于无人机的三维激光扫描仪采集到了某线路的点云数据,然后通过预处理以及特征提取等过程完成了对数据的处理,在此基础上建立了对应的三维模型,并完成了对线路环保缺陷的识别。研究结果显示,该方法有助于改善输电线路环保验收的效率,相对于常规的检测方法在效率以及精度上均体现出一定的优势,并且能够获取到缺陷的位置以及类型等详细信息,弥补了传统环保验收方式中的不足问题,适合于应用到实际输电线路工程的环保验收中。
参考文献
[1]浦石,吴新桥,燕正亮,等.无人机激光雷达智能识别输电线路缺陷[].遥感信息,2017,32(04):52-57.
[2]黎炎,李哲,胡丹晖,等.基于雷达监测信号的输电线路安全预警系统[J].电测与仪表,2019,56(04):70-74+94.
[3]王松波,李马骁,李海瑞,等.基于三维激光雷达技术的输电线路廊道障碍物检测研究[J].电子科技,2019,32(04):81-84.
[4]李伟,唐伶俐,吴昊昊,等.轻小型无人机载激光雷达系统研制及电力巡线应用[J].遥感技术与应用,2019,34(02):269-274.
[5]刘立超,魏国粱,张青松,等.基于激光雷达的农业耕作微地貌测量装置设计与试验[J].农业机械学报,2019,50(07):84-92.
[6]韩晓言,何静,游安清.激光雷达在电力巡线应用中的计算方法[J].太赫兹科学与电子信息学报,2019,17(04):703-708.
[7]龚昕,张楠.基于Hough变换的圆检测算法的改进[J].信息技术,2020,44(06):89-93+98.
[8]杜静,魏鸿磊,樊双蛟,等.基于HOUGH变换的指针式压力表自动识别算法[J].机床与液压,2020,48(11):70-75.
[9]王奇锴,潘如如,高卫东,等.基于图像处理的牛仔织物纬斜检测方法[J].棉纺织技术,2020,4806):31-35.
[10]张夏,肖启芝,许凯,等.Haar-like特征在稀疏建筑物检测中的应用[J].测绘地理信息,2020,45(03):39-43.
