胡颖团队提出一种基于磨削力模型的机器人辅助椎板减压手术切削深度实时监控方法
2020-07-29
中国科学院深圳先进技术研究院认知与交互技术研究中心胡颖研究团队在机器人辅助椎板减压切除术切削深度实时监控方面的研究取得进展。相应成果为“Jiang ZL, Qi XZ, Sun Y, et al. Cutting depth monitoring based on milling force for robot-assisted laminectomy [J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(1): 2-14(基于磨削力模型的机器人辅助椎板减压手术切削深度监控)”。
人体脊柱椎管狭窄是一种常见的骨科疾病,可引起一系列神经系统症状。椎板减压切除术是治疗椎管狭窄症的常见方法,由于该手术区域靠近脆弱的脊柱神经,手术精度要求高、耗时长,因此经验丰富的医师方可进行此类手术。随着科技的发展,采用机器人辅助手术越来越多地被人们所接受。为了防止机器人执行器械末端磨头磨穿椎板并伤害神经,该研究提出一种基于磨削力模型的实时磨削深度监控方法,以确保手术安全。
具体地,首先基于球形磨头的几何形状建立其在不同深度的切削力模型;然后,采用牛骨作为磨削实验材料,并采集实验中的机器人末端执行器械的力信号,对切削力模型中的未知参数通过粒子群优化算法进行辨识;最后,通过多次实验建立机器人磨削深度与磨削力之间的相互关系模型。
实验结果表明,当机器人磨削深度在[0.8, 1.2] mm 时,基于磨削力的磨削深度预测结果精度可达±0.1 mm;当深度增加到[1.2, 1.6] mm时,预测精度为±0.2 mm。
该研究所提出的基于磨削力模型的机器人磨削深度实时监控方法,具有较好的临床应用价值,可实现机器人辅助椎板减压手术的术中状态精细感知,确保机器人手术安全。同时,相关技术可以很好地应用在机器人辅助神经外科、关节置换等手术中。
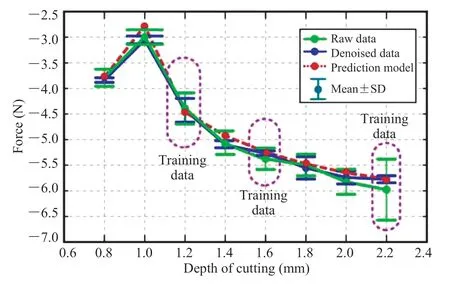
图1 机器人磨削深度预测模型

图2 球形磨头几何模型
