一种可变轨发光的汽车室内阅读灯的设计
2020-07-27郑志磊
郑志磊
(广汽蔚来新能源汽车科技有限公司,广东 广州 511400)
引言
LED光源由于体积小、节能环保、便于智能控制等特点,可以迎合汽车照明更先进、更安全、更舒适的发展需求,近年来在汽车照明领域中的应用越来越多[1-4]。均匀发光一直是汽车室内阅读灯设计的目标,为了实现均匀发光,一般采用的技术是多层结构的光学设计或者大量摆放LED加上带扩散剂的透镜。但是,这些均匀发光技术可能会带来较长周期的设计以及高额模具费用投入。同时,在结构锁定以后,后期将无法再次更改发光形状。
本文将使用设置好的2条轨道,配合旋转杆实现可调节的旋转轨道,轨道的端部分别安装一个LED发光模组。通过调节可变的双椭圆轨道,该结构可以实现不同形状的发光面。然后通过Mathematica工具,汇总这些可实现的发光形状。
1 可变轨的汽车室内阅读灯的轨迹解析
图1所示为本文提出的可变轨汽车室内阅读灯的示意图。图1(a)中,灯具内部设置2条特殊的轨道,当马达(4号部件)做圆周驱动时,发光模组1(1号部件)会沿5号轨道运行,同时发光模组2(2号部件)会沿3号轨道运行。根据文献[5],人类视觉系统对亮物体的响应延迟时间约74 ms,因此设置发光模组1(1号部件)在74 ms内运行一周,同时发光模组2(2号部件)也是74 ms以内运行一周,从而达到人类视觉将发光轨迹视作整体连续发光的效果。在该灯具里面发光轨迹有两条,通过运动轨迹解析发现,两个轨迹均是按照椭圆运行的。

图1 可变轨的汽车室内阅读灯Fig.1 Changeable orbit automotive interior luminaire
如图2(a)所示,元件1的轨迹5的运动方程符合标准椭圆公式:
(1)
其中,短半轴a=a0+ai,长半轴b=b0+a0+ai。a0为固定长度,ai受到调节电机控制为可变长度,b0为固定长度。
如图2(b)所示,元件2的轨迹3的运动方程符合标准椭圆公式:

图2 轨迹5和轨迹3的长半轴和短半轴示意图Fig.2 Semi-major axis a and semi-minor axis b of #5 and #3 trajectory

(2)
其中,长半轴c=b0+d0+dj,短半轴d=d0+dj。b0为固定长度,dj受到调节电机控制为可变长度,d0为固定长度。
2 可调节发光轨迹的汽车室内阅读灯全轨迹图像计算
设计过程中,对比不同尺寸汽车室内阅读灯,在灯内放置了相同的长轨道A,不同尺寸的短轨道B。这里设置灯具最大外部长度为330 mm,由于装配结构和内部安全距离要求,灯内只能有300 mm空间,a0=10 mm,b0=65 mm,d0=10 mm,ai=0~75,dj=0~N,N为考虑x轴向灯具尺寸限制后的最大值。
根据Mathematica的应用[6],得到不同尺寸灯体内可调节发光轨迹的全轨迹结果,如表1所示,全轨迹图像显示了不同尺寸灯具的可调轨迹范围。
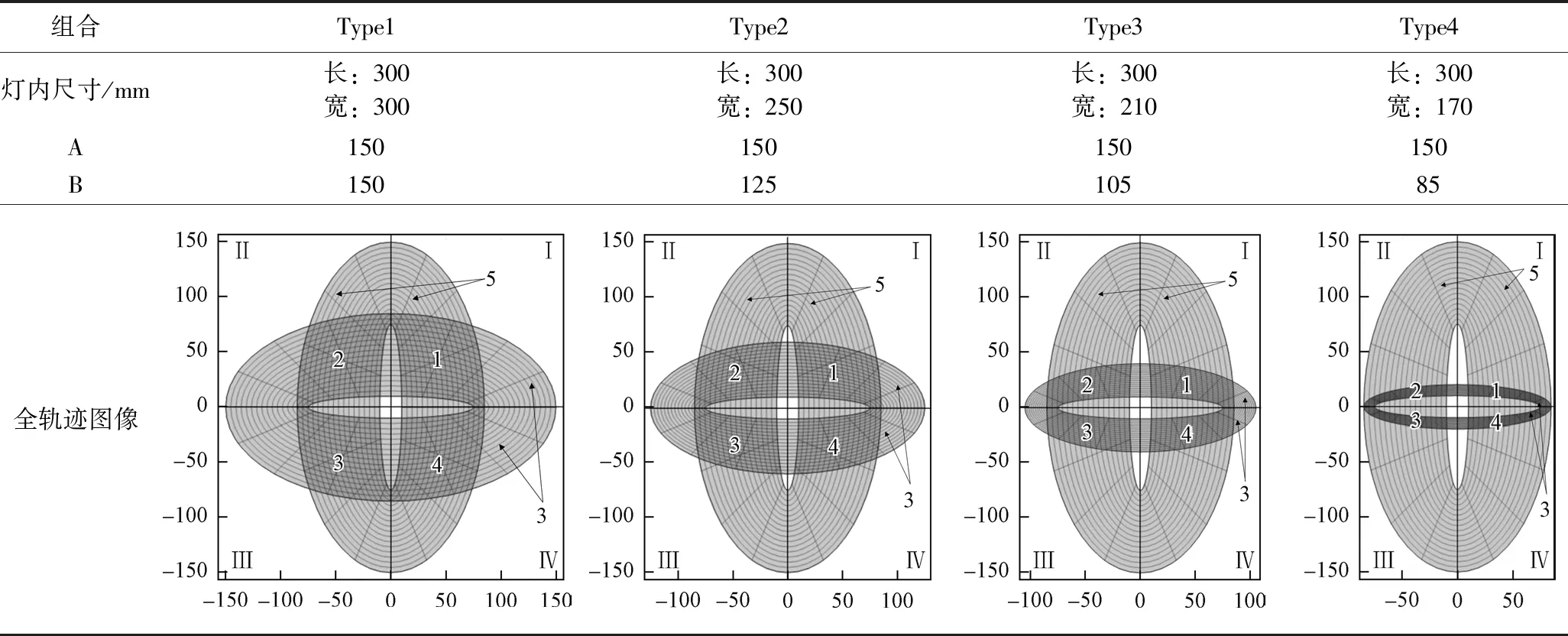
表1 不同尺寸的汽车室内阅读灯和全轨迹图像
3 可调节的形状和理论计算
可调节轨迹为两条椭圆形轨道,以下将基于表1中Type1的全轨迹来讨论可调节的形状。一般汽车阅读灯的造型会选择椭圆形、双月形、U形、近似正方形等。由于可变轨迹自身即为椭圆形,因此本文不再阐述。
1)双月形轨迹。基于Type1的全轨迹图像,结合发光单元1的轨迹公式(1),得到双月形形状轨迹的公式:
设定ai分别取0~15、30~45、60~75三个区间,设定θ从45°~135°为上半月,θ从225°~315°为下半月,那么可以得到基于轨迹5的双月形轨迹动态显示效果,如图3所示。

图3 基于轨迹5的动态双月形示意图Fig.3 Dynamic double moon shaped #5 trajectory
结合发光单元2的轨迹公式(2),得到双月形形状轨迹的公式:
由于病情的进展、化疗的毒副作用和巨额的医疗费等多种因素,不仅使AL患者承受着巨大的生理痛苦,亦造成了强大的心理上压力。此时,仅以症状、体征为评价指标的传统模式已显得局限,亟需综合性的、全面的健康状况指标来评价疗效,而生存质量评价恰好符合这一要求。
设定dj分别取0~15、30~45、60~75三个区间,设定θ从45°~135°为上半月,θ从225°~315°为下半月,那么可以得到基于轨迹3的双月形轨迹动态显示效果,如图4所示。

图4 基于轨迹3的动态双月形示意图Fig.4 Dynamic double moon shaped #3 trajectory
当然,还可以通过调整θ的范围,实现其他形状大小的双月形图案,这些都可以通过控制θ、ai和dj值的设定来达到想要的图形效果。
2)U形轨迹。结合发光单元2的轨迹公式(4),设定dj分别取0~15、60~75两个区间,通过Mathematica计算,发现完整的U形由主体和补充直边构成,补充直边需要通过多段小单元来配合实现。
dj取0~15时,小U形的构成分成很多小单元,具体如表2所示。当然,我们仍可以根据发光大小需要,继续增加补充直边的长度。在这里我们在两边分别增加5段补充直边,同时为了尽量让直边平直,每段补充直边均设置不同的dj值范围,逐渐加大。

表2 dj取0~15时小U形的构成单元
通过Mathematica,得到小U形的图像如图5(a)所示,可以观察到上下亮条平直边。
dj取60~75时的大U形的构成分成很多小单元,具体如表3所示。当然,仍可以根据发光大小需要,继续增加补充直边的长度。这里,在两边分别增加5段补充直边,同时为了尽量让直边平直,每段补充直边均设置不同的dj值范围,逐渐加大。

表3 dj取60~75时大U形的构成单元
通过Mathematica,得到大U形的图像如图5(b)所示,可以观察到上下亮条平直边。

图5 dj取0~15和60~75时的小U形图像Fig.5 U shape while dj=0~15 and dj=60~75
3)近似正方形轨迹。根据式(1)和式(2),结合Type1,可以得到多个近似正方形。其中近似正方形其左右边公式如式(3),上下边公式如式(4),最小的近似正方形边长约20 mm,其各边的长半轴和短半轴、θ取值如表4所示。
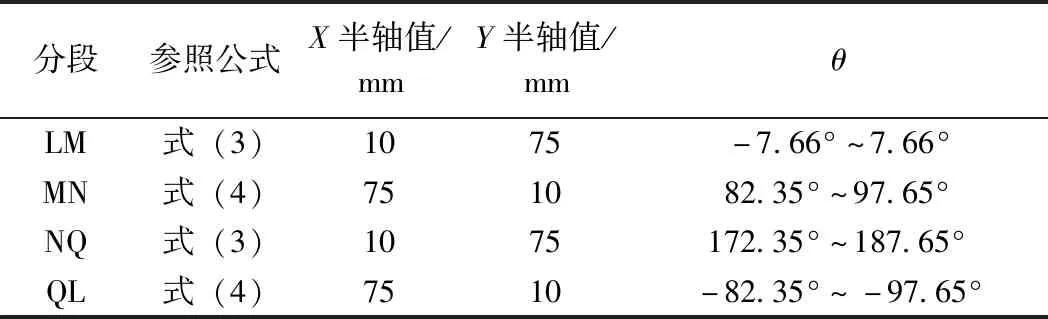
表4 最小的近似正方形各边方程和θ取值
然后可以根据表4中的值,通过Mathematica计算得到图6(a)所示的最小近似正方形图。

图6 最小、最大近似正方形图像Fig.6 The smallest and largest approximate square shape
采用相同原理,可以获得最大近似正方形的各边的长半轴和短半轴、θ取值如表5所示。
根据表5中的值,通过Mathematica计算得到图6(b)所示的最大近似正方形图像。

表5 最大的近似正方形各边方程和θ取值Table 5 Formula and θ value of the largest approximate square shape
4 结束语
本文通过对Type1灯具的可调轨迹图像和Mathematica计算发现,可变轨发光的汽车室内阅读灯通过双椭圆轨道的调节,可以精确地获得多种图像,并且可以通过调节长短半轴以及角度实现多种动态效果图像。
当然,本文主要通过取点和图像校对得到了不同图像的精确角度值,特别是最小近似正方形和最大近似正方形的图像,其角度值和几何数学中的数据存在细微的差别,在后续研究工作中,将主要针对这些差异进行研究和探讨。
