道路智能照明动态模型研究及其应用
2020-07-27付保川吴征天许馨尹李淑娴
刘 畅,付保川,2 ,吴征天,2,许馨尹,李淑娴
(1.苏州科技大学电子与信息工程学院,江苏 苏州 215009;2.苏州智慧城市研究院,江苏 苏州 215009)
引言
道路照明是城市基础设施的重要组成部分,为城市通行车辆和行人提供良好的视觉环境,保障道路通行安全。道路照明的电力消耗在城市能源消耗中占比较大[1],对于城市道路照明系统的节能研究引起了人们的高度重视。在道路照明系统中,提升照明系统动态性能和照明效率是节约照明能耗的重要途径。本文将研究一种道路照明动态模型,提高道路照明系统的动态性能, 人工光源随自然光的变化动态的调整输出满足照明需求,实现自然光源和人工光源的动态互补,以照明规范为依据,根据光学相关原理建立照度模型,以模糊控制理论为基础建立模糊控制策略,在控制策略中引入车辆行为信息,以车辆行为信息为基础设定人工光源状态转换的维持时间,利用粒子群算法探索最佳的灯具照度组合,实现自然光源和人工光源的智慧融合,提高节能水平。
1 照明模型建立
1.1 点光源照度模型
现有的道路照明系统一般有两种工作状态,即完全开启或完全关闭,目前在道路照明系统中灯具对路面的照度补偿值为灯具按额定功率发光计算所得的定值。引入光学原理根据点照度计算公式构建现有照明系统照度模型。如图1所示。其中W为灯具安装位置,H为灯具安装高度,Q为路面上任意一点,根据光学原理,灯具W额定功率下在Q点所产生的照度值为

图1 照度计算示意图Fig.1 Intensity of illumination computation
(1)
式中I(θ)表示灯具W配光曲线θ方向的光强;E表示灯具W在Q点产生的水平照度;L表示灯具W到Q点的水平距离。M为灯具的维护系数,Φ表示额定光通量。由Q点所处的位置可以得到照度表达式中的余弦值为
(2)
单个灯具在Q点产生的照度补偿量为
(3)
在道路照明系统中不仅仅是一盏灯具,还有其他灯具的影响,如图2所示。
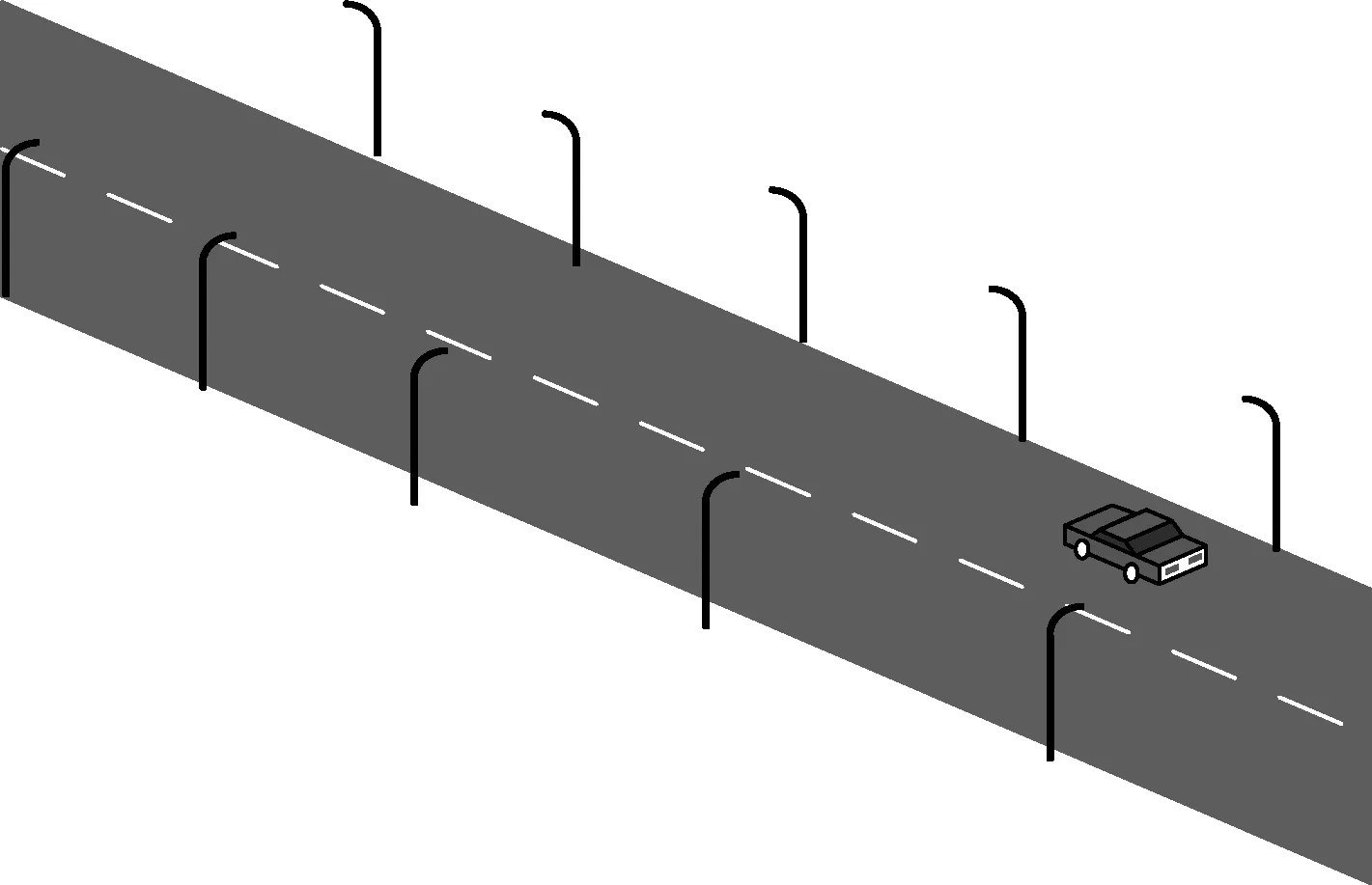
图2 道路场景示意图Fig.2 Road scene
Q点的最终照度补偿值为多个灯具在Q点产生的照度值的线性叠加,可表示为
(4)
其中,
式中,Eij表示第i盏灯在j点产生的照度,n为计算区域内的灯具数量,计算区域内路面平均照度可表示为

(5)
式中,Eav表示计算区域内路面的平均照度,m为计算区域内计算点的个数。
路面亮度总均匀度计算公式为
(6)
式中,Lmin为计算区域内路面最小亮度;Lav为路面平均亮度。
路面亮度纵向均匀度计算公式为

(7)

(8)
式中,B为亮度,E为照度,ρ为路面反射率。
1.2 混合动态模型
现有的照明系统在实时根据环境照度动态调整灯具工作状态方面存在改进空间,对现有的照明系统进行优化,优化后的系统引入自然光和车辆因素,主要由车辆信息采集单元、环境信息采集单元、调节控制单元以及照明单元四个模块组成。车辆信息采集单元主要负责采集车速、行驶方向、车辆有无等信息。环境信息采集单元主要负责采集路面亮度、自然光强度、行驶车辆灯具对路面产生的实时照度等信息。调节控制单元以采集的车辆信息和环境信息为依据,以道路照明规范为标准,计算各盏路灯的实时照度输出值。
本文研究的道路照明系统动态模型可以根据车辆信息和道路光环境信息动态调节路灯的工作照度,当监测到道路上有车辆信息的时候,系统根据实时环境信息动态自主的调整灯具的输出照度以满足正常照明需求,根据监测到的车速信息来决定车辆前进方向路灯持续工作时间,当道路上没有车辆通行的时候,路灯则以低功耗低亮度运行,实现路灯根据实时环境变化自主调整工作模式,在提供更加人性化照明需求的同时解决电能的浪费问题。
根据机动车交通道路照明评价指标对路面平均照度、路面亮度均匀度、纵向均匀度的要求,确定混合模型参数。优化后路面的照度值为灯具的补偿值和环境照度值的叠加,灯具输出值为照度标准值与环境照度值的差值,其中环境照度值包括日光照度和周围其他灯具(车辆照明灯、建筑照明灯具)的补偿值。优化后多个灯具在Q点产生的照度表示为

(9)
其中,
式中,Eij表示第i盏灯在第j点产生的照度,Δj表示在第j个点的环境照度值假设路面Q点的坐标为(x,y,0),则L可表示为

(10)
式中,xi表示Q点距离第i盏灯的水平距离,yi表示Q点距离第i盏灯的垂直距离θ可表示为

(11)
在光学照度公式中,由于没有功率参数在内,根据灯具发光效率建立光通量和功率的关系,同种灯具光通量越大,对应的功率越大,为了节约道路照明能耗,在道路照明系统中以灯具总光通量为最小为评价指标。参数优化模型为
(12)
约束条件为

(13)
式中,θ为灯杆与路面一点到灯具连线的夹角,h为灯具安装高度,L为路面一点到灯杆底部的直线距离,L′为道路长度,Ei为路面某点照度,ei为路面设定的最低照度,eav为照明规范规定值,u0为照明规范规定的亮度总均匀度最小值。
2 模型求解
利用粒子群算法求解模型。粒子群算法是通过模拟自然界鸟群觅食行为而发展起来的一种基于群体协作的随机搜索算法,将模型的优化问题转化为搜索空间中的粒子,通过迭代找到最优解,在每一次的迭代过程中,粒子通过跟踪的两个极值完成更新。
假设在n维空间中,含有m个粒子的粒子群,空间中的粒子位置为优化问题的潜在解,将其带入到目标函数求出其适应值,通过对适应值的比较得到其优劣性,粒子所经历的最优位置记为个体历史最优值,相对应的适应值为个体的最优适应值,粒子群经历过的所有位置中的最优位置记为全局历史最优值,对应的适应值为全局历史最优适应值,粒子的更新速度和位置的迭代计算公式如下:
vid=wvid+c1r1(pid-xid)+c2r2(pgd-xid)
(14)
xid=xid+vid
(15)
式中vid表示所有路灯的亮度变化的速度组合;w表示惯性因子,r1,r2表示[0,1]区间内的均匀分布的随机数,pid表示系统中第i盏路灯搜索到的个体极值,pgd表示系统中所有路灯搜索到的全局最优值;xid表示当前灯具的亮度组合。误差范围为±2%,在该范围内搜寻能耗最小的灯具亮度组合,用fFit表示粒子的适应度,fFit/R(R表示灯具发光效率)表示目标函数值(能耗)。
3 控制策略
本文研究的道路照明系统动态模型可以根据车辆信息和道路光环境动态调节路灯的工作照度,由于在道路照明系统中很难得到一个精确的数学模型对灯具进行控制,为了实现对道路光环境的全局控制,确保灯具工作状态平稳转换,避免在调光过程中出现抖动的现象,选择模糊控制策略对灯具进行控制。控制对象为道路照明系统,控制器的输入量有两个:环境照度值和车辆速度值,通过对采集到的实测数据和路面光环境特征,运用模糊控制算法进行推理判断,将对能耗的调控转换为对灯具光通量的控制。
运用模糊控制将研究对象的数学描述转换为用语言变量描述的形式,形成一种模糊判断逻辑并生成模糊算法。就整个照明系统而言,具体工作流程为:首先将传感器采集到的环境照度值和车辆速度值送到控制器,控制器根据采集到的环境照度值做出是否进行开启灯具的判断,如果路面照度值低于设定的路面照度最低值,则路灯开启,路灯开启的开度则根据实时的环境照度动态调整,路灯开启之后,控制器进行第二步判断,判断路面是否有车辆通行,如果路灯开启之后,道路上无车辆通行,路灯则按设定值降低照度水平;道路上有车辆通行时,控制器根据环境照度调整灯具提高照度值,根据车辆速度值确定灯具提高照度值之后的维持时间,保证车辆安全顺利通行。实现自然光和补偿光的最优融合,在最大限度的利用自然光的基础上结合车辆行为节约电能。将控制器的输入输出量按具体路况进行模糊化处理,在V、L、T、U的论域定义3个语言子集:{“正大(PB)”,“正中(PM)”,“正小(PS)”}。
4 实验仿真
在DIALux4.12环境下搭建道路照明场景,道路类型选为主干路,灯具选用欧普LED Streetlight-P2 180 W-5700-GY-GP,灯具光通量27 009 lm,可以实现0~27 009 lm多级调光,左右路面宽度设置为8 m,中间设置隔离岛,隔离岛宽度为1.5 m,高度为0.1 m,灯具排列设置为双排对称排列,灯杆高度设置为8 m,灯杆距离设置为25 m,评估区域选用10×6的网格区域进行评估,评估数据如图3所示。

图3 点照度分布图Fig.3 Illumination distribution
通过评估数据得到评估区域平均照度为49 lx,最小照度为28 lx,最大照度为59 lx,路面亮度总均匀度为0.580,路面亮度纵向均匀度为0.480,仿真得到的各项数据均满足道路照明设计标准,在此基础上进行优化控制。
控制策略中,为了给行驶车辆提供安全的前方视野,将灯具进行分块控制,在仿真实验中以5盏灯具作为一个单元进行控制,假设在一个控制单元内环境照度值相等。仿真道路环境中道路限速90 km/h,将0~30 km/h记为正小,30~60 km/h记为正中,60~90 km/h记为正大。当环境照度值高于30 lx时灯具关闭,低于30 lx时对环境照度值进行划分,0~15 lx记为正小,15~30 lx记为正中,大于30 lx记为正大。路灯维持时间根据车速值设定,取每个论域的中间值作为参考值,由5盏灯具的距离为100 m,通过速度时间关系确定维持时间,当速度在0~30 km/h时,路灯维持时间设定为24 s记为正大,速度在30~60 km/h时,路灯维持时间设定为12 s记为正中,速度在60~90 km/h时,路灯维持时间设定为6 s记为正小,如图4所示。
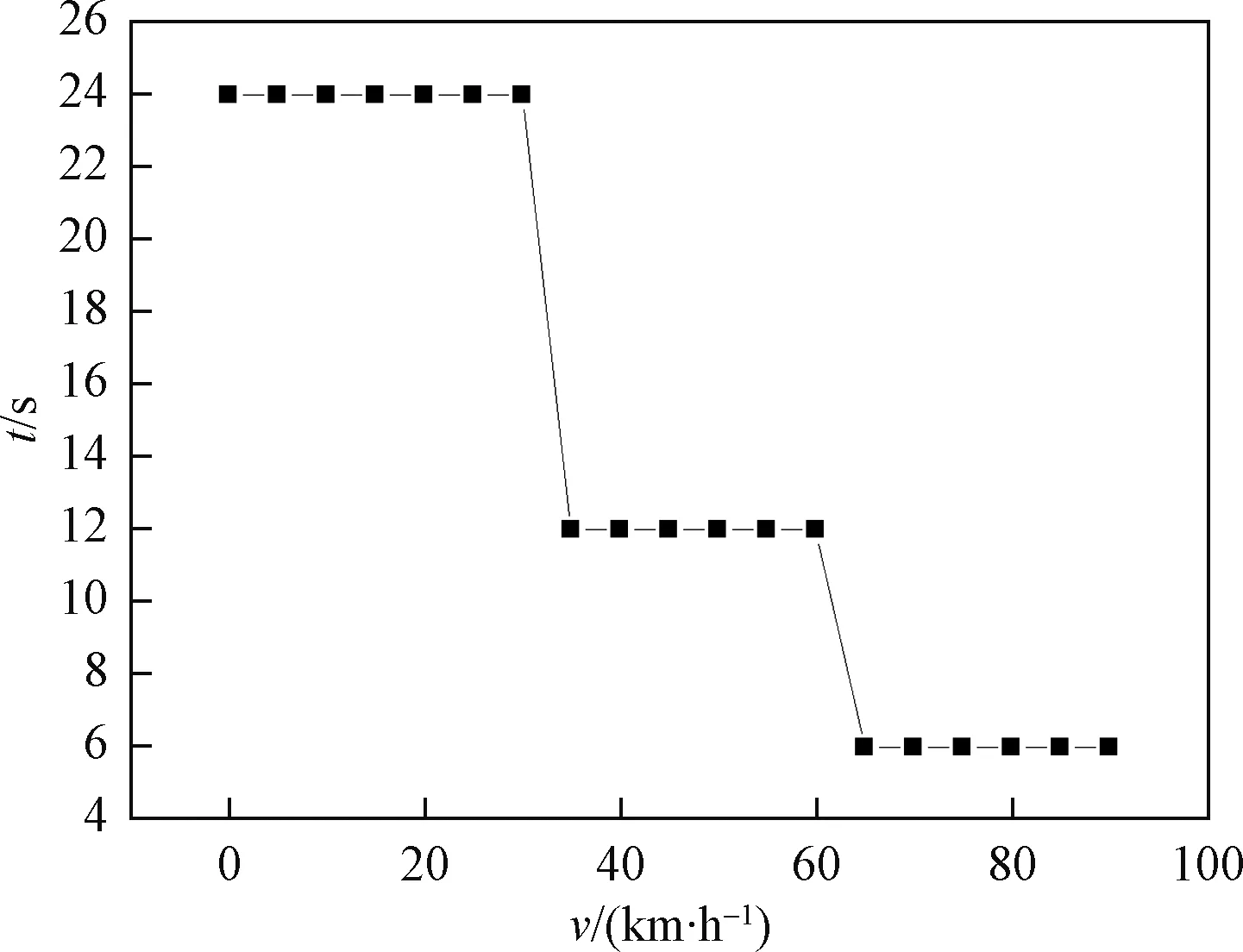
图4 速度时间维持图Fig.4 Velocity and time maintenance
路面照度值在无车辆通行时维持在20 lx,否则维持在30 lx,灯具根据测得的环境照度值调整输出照度,为了满足照明需求,取环境照度论域中的最低值作为参考值设定灯具补偿照度。环境照度的正小,在无车辆通行时灯具补偿照度为20 lx,否则为30 lx;环境照度的正中,在无车辆通行时灯具补偿照度为5 lx,否则为15 lx;环境照度的正大,灯具的补偿照度为0。如图5所示。
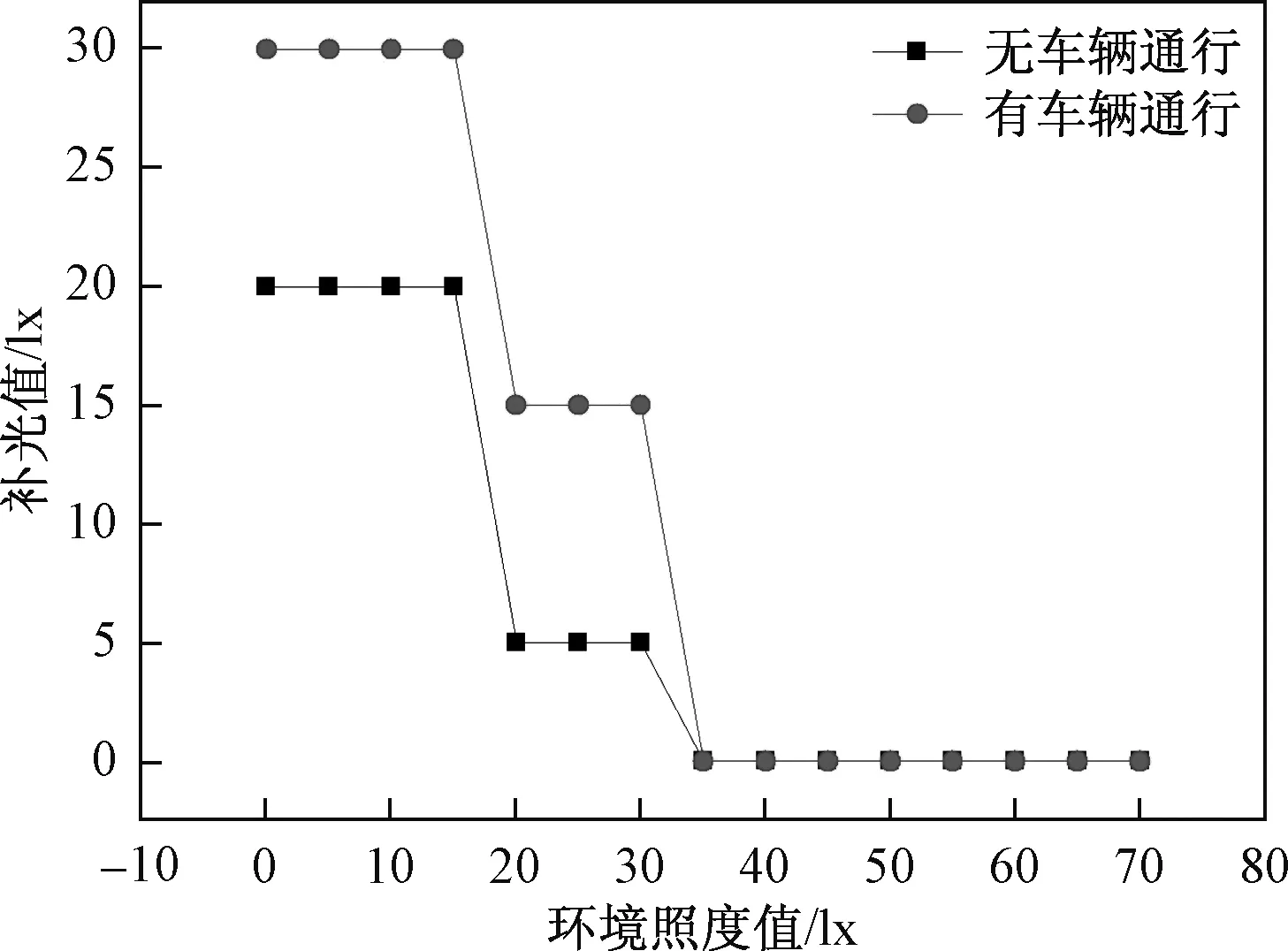
图5 照度补偿图Fig.5 Intensity of illumination compensation
车流量数据取学校附近道路在17:00—22:00的实际车流量,如图6所示。道路上有无行驶车辆对应不同的控制策略,根据灯具在不同状态下的输出功率和工作时间得到灯具的能耗数据,道路有无通行车辆两种状态的工作时间如图7所示,在仿真环境中环境照度值分布如图8所示,与环境照度值相对应的人工光源照度补偿值如图9所示。MATALAB环境下进行优化求解,初始粒子个数M=600,粒子迭代次数最大值设为500,加速因子C1=0.7,C2=0.7,惯性因子最大值设为0.8。从17:00开始每隔10 min采集一次灯具的能耗值,利用粒子群算法对模型求解,得到从17:00—22:00的5 h内灯具所消耗电量随时间变化的能耗曲线,如图10所示。
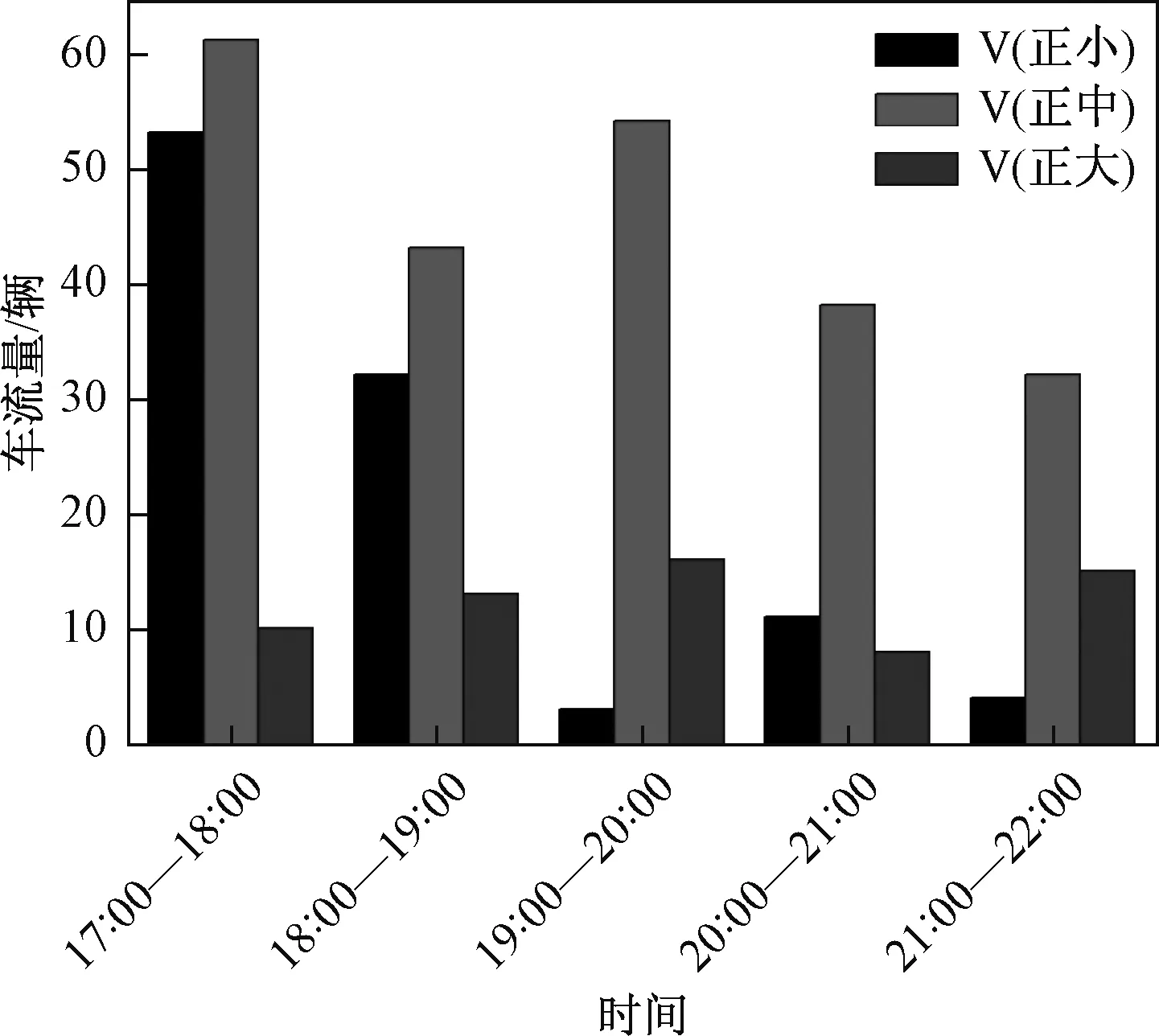
图6 车流量统计图Fig.6 Traffic statistics
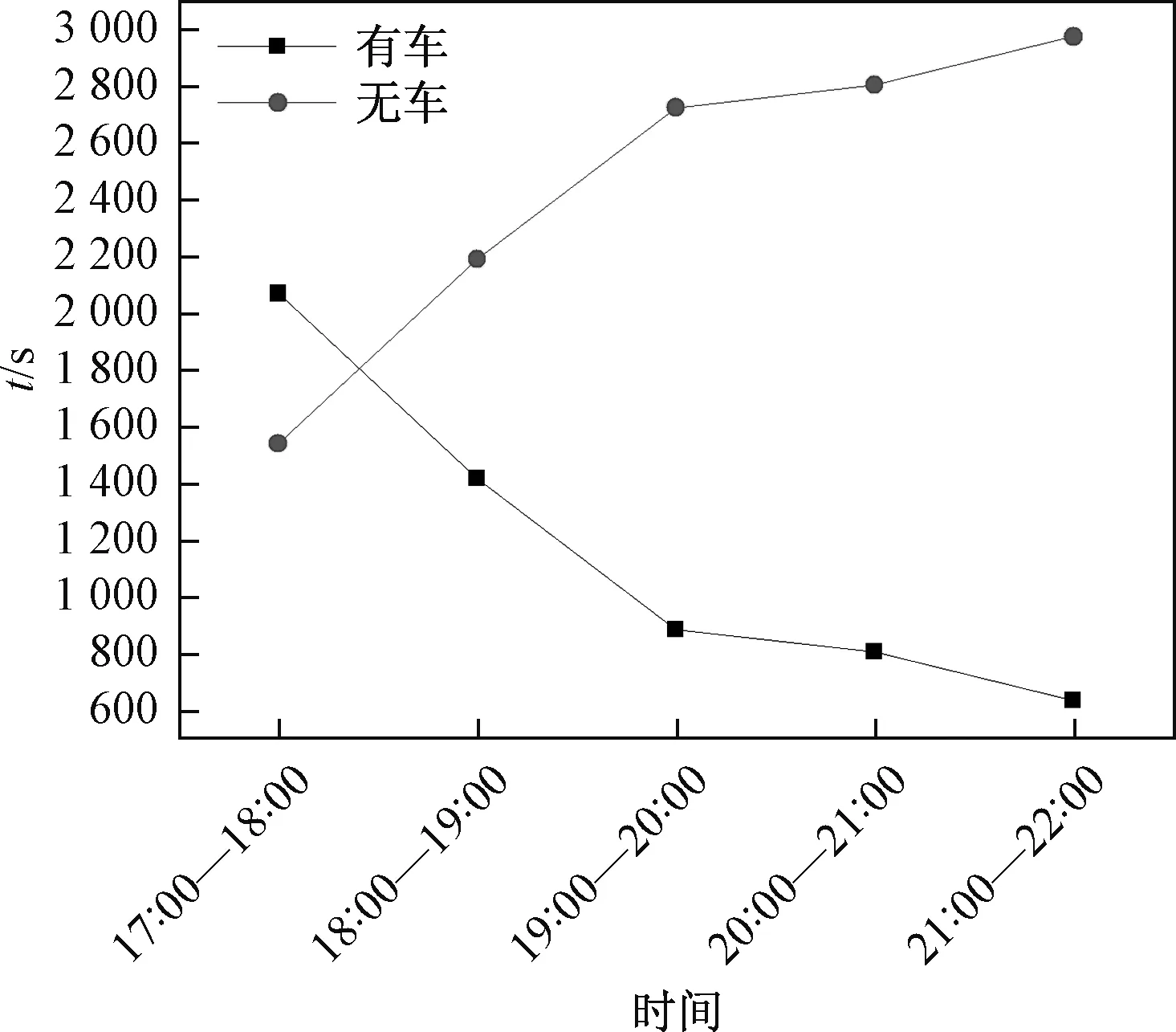
图7 工作时间累积图Fig.7 Working time accumulation

图8 环境照度图Fig.8 Environment illumination
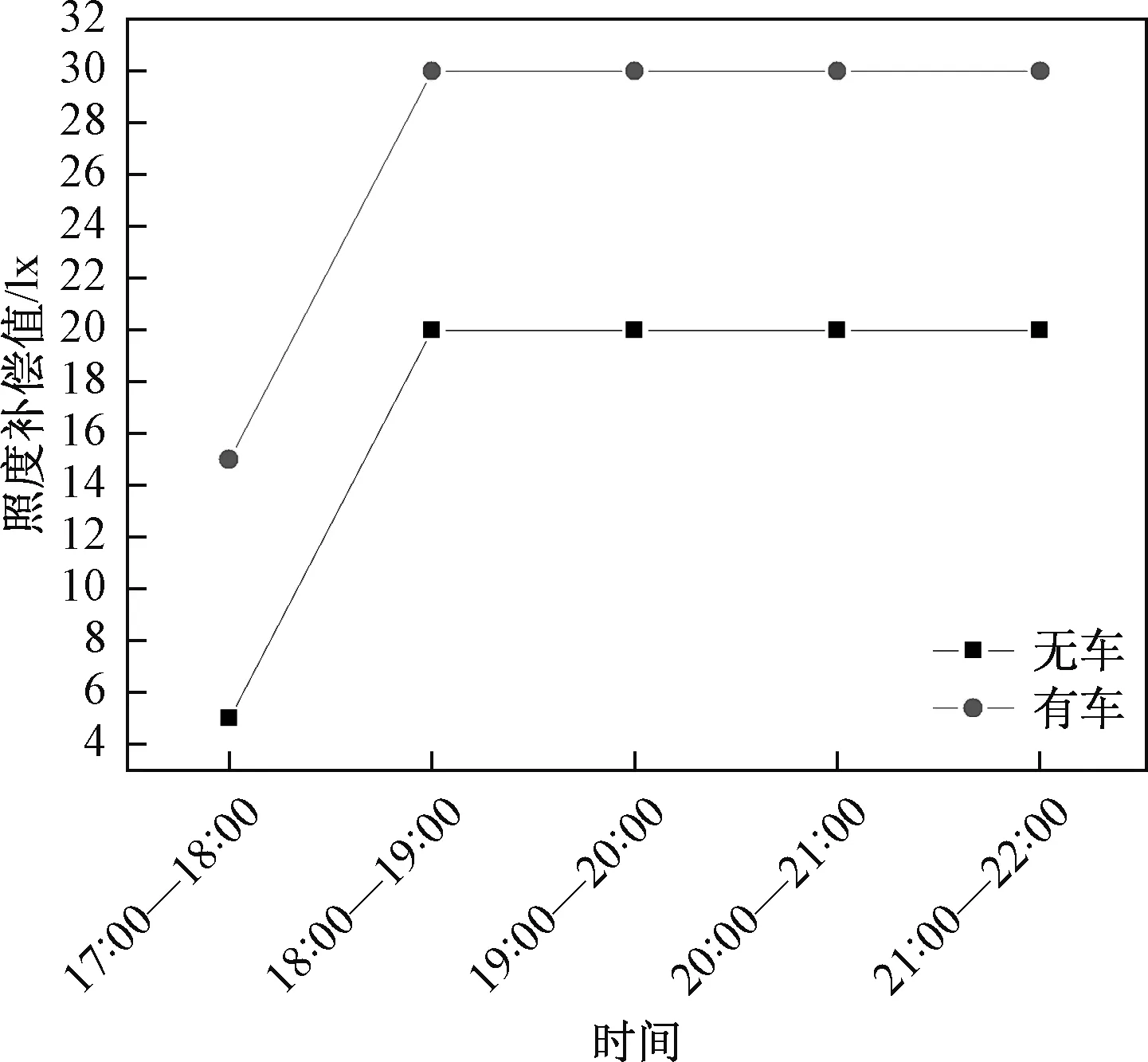
图9 照度补偿时间分布图Fig.9 Illumination compensation

图10 能耗对比图Fig.10 Energy consumption contrast
可以看出,自17:00开始,由于刚开始时自然光较强,灯具的开启等级较低,在初始时刻动态模型的耗电量较低,在该时间段内由于车流量的变化引起能耗的上下波动,随着时间的推移,自然光逐渐减弱灯具的开启等级逐渐变大能耗出现上升趋势,在110 min左右出现最大值,随后由于车流量的减少和车速的增大灯具开启时间减短,灯具的能耗呈现下降趋势。通过能耗数据可以看出灯具的能耗明显降低。
5 结语
本文研究了一种道路照明系统动态模型,实现对路面亮度的实时监测控制。以车辆信息感知传感器采集到的数据为基础,计算与之对应的路灯开启时间与工作时间,以路面亮度传感器采集的数据为基础,计算与城市道路照明设计标准中的规范值所对应的路灯输出,根据灯具的发光效率建立起光通量与灯具能耗的对应关系,进一步分析了灯具的能耗。利用粒子群算法对模型进行了求解,根据求解结果通过模糊控制器动态的调整灯具输出,确保满足照明需求的同时实现节能目的。
