微型晶体谐振器封盖移载机械手移载精度分析
2020-07-15幸赛鼎喻信东李刚炎
胡 剑,幸赛鼎,喻信东,李刚炎
(1.武汉理工大学 机电工程学院,湖北 武汉 430070;2.湖北泰晶电子科技股份有限公司,湖北 随州 441300)
微型晶体谐振器的封装过程主要包括封盖预定位、短边缝焊、长边缝焊等工序。封盖移载机械手从供料振动盘移载微型晶体,其移载过程具有移载对象尺寸小(毫米级)、移载动作时间短(小于0.3 s)的特点。微型晶体谐振器封盖移载机械手基于真空吸取技术,利用吸嘴腔体负压吸取工件,可实现微小型工件无损伤移载。在封盖移载过程中,不可避免地会出现封盖相对吸嘴初始吸取位置偏移的现象,当封盖移载误差量过大,无法满足封盖移载精度要求时,后续工序稳定性将受到极大影响。传统机电系统调试一般采用机械系统与控制系统分别调试,最后进行联合实验的方法,该方法调试周期长、成本高,往往无法达到最佳调试效果[1-2]。通过封盖移载机械手运动学模型与气缸速度控制模型联合仿真,以达到系统所需性能,有效提高物理样机设计和调试效率[3-4]。
1 封盖移载机械手移载精度要求
本文所研究的微型晶体谐振器封盖短边长度a=2.5 mm,长边长度c=3.2 mm,吸嘴外径D=1.4 mm。吸嘴初始吸取位置为封盖中心,当封盖回位速度过大时,封盖将相对初始吸取位置沿短边方向偏移。如图1所示,根据后续封盖校正工序位置精度要求,封盖不应使吸嘴偏移出其长边边缘。根据封盖与吸嘴尺寸可知,封盖最大移载误差量l0=0.55 mm,即封盖移载误差量小于l0即可满足封盖移载精度要求。
图1 封盖移载误差示意图
为改善微型晶体谐振器封盖移载偏移现象,提高封盖移载机械手移载精度,首先分析封盖移载机械手结构组成,基于ADAMS/View建立封盖移载机械手运动仿真模型;基于MATLAB/Simulink建立封盖移载机械手偏转气缸作动速度模型,得到不同节流阀开度下的气缸回程速度曲线;通过ADAMS/View的SPLINE插值模块将所得回程速度曲线导入气缸驱动MOTION函数,测量不同气缸回程速度下的封盖回位速度;根据封盖真空吸取原理与封盖回位动作过程,建立封盖移载误差模型;将封盖回位速度代入封盖移载误差模型求解,得到节流阀开度与封盖移载误差量的对应关系,分析流程如图2所示。

图2 移载精度分析流程
2 封盖移载机械手运动仿真模型
2.1 封盖移载机械手结构组成
封盖移载机械手采用气缸与弹簧驱动连杆机构,完成微型晶体谐振器封盖过程中的封盖移载工序,包括吸嘴偏转、吸取、回位3个动作。首先由气缸驱动偏转连杆完成吸嘴偏转动作,随后吸嘴腔抽负真空吸取供料振动盘中的封盖完成吸取动作,最后气缸活塞回位同时拉伸弹簧收缩带动偏转连杆完成吸嘴回位动作。
针对封盖移载机械手动作过程,采用Solidworks建立封盖移载机械手实体模型,为方便后续仿真工作,建模过程中对封盖移载机械手进行简化,仅选用参与传动的主要零件进行建模装配,其中气缸选用CDUJB6-6D双作用自由安装型气缸。封盖移载机械手结构组成如图3所示。
图3 封盖移载机械手结构组成
2.2 封盖移载机械手仿真模型
将建立的封盖移载机械手三维实体模型保存为Parasolid(*xmt.txt)接口文件格式,导入ADAMS/View软件中。为使所建立仿真模型具有与实际物理样机具有相同或相似的物理属性,需要对各零件材料进行定义,所建模型材料属性如表1所示。为实现运动学与动力学仿真,需要对模型中各零件间添加固定约束和运动副,并在移动副与转动副处添加摩擦阻尼,如表2所示。利用ADAMS/View柔性连接中弹簧模块模拟拉伸弹簧,在气缸活塞杆与缓冲垫之间设置接触。建立的封盖移载机械手运动仿真模型如图4所示。
表1 运动仿真模型零件属性

表2 运动仿真模型约束设置
图4 封盖移载机械手运动仿真模型
3 封盖回位速度分析
3.1 封盖移载机械手偏转气缸作动速度模型
微型晶体封盖回位速度由偏转气缸回程速度决定,而气缸作动速度受到节流阀开度、气管直径、管路布置形式等影响。考虑到压缩气体流动的复杂性,在对气缸运动过程进行建模时做如下假设与简化:
(1)推导数学模型时,将管路容积折算到气缸两腔室,使其成为气缸容腔闭死容积的一部分;
(2)气动系统中的工作介质空气为理想气体,忽略气体的动能,并且气动回路满足理想气体状态方程;
(3)忽略气缸与外界和气缸两腔之间的空气泄漏;
(4)气动系统中的密闭容腔内的空气与外界无热力交换;
(5)气源压力和大气压力恒定,温度为环境温度;
(6)同一容腔中的气体温度和压力处处相等。
在上述假设的基础上,建立偏转气缸的作动速度模型。
3.1.1 气体质量流量方程
将节流阀等效为节流孔,则流经节流孔的质量流量方程为:
(1)
式中:Qm为流经节流孔气体质量流量;C为节流孔声速流导;Pu为节流孔上游压力;Pd为节流孔下游压力;ρ0为标况下的气体密度;T0为标准温度;Tu为腔室温度;b为临界压力比。
其中节流阀的声速流导C和临界压力比b可由ISO6358[5]中的公式计算得到:
(2)
(3)
式中:L为节流孔节流长度;d为节流孔开口直径。
综上所述,可求得进气腔气体质量流量Qm1和排气腔气体质量流量Qm2,其公式分别为:
(4)
(5)
式中:C1、C2分别为进气腔和排气腔声速流导;P1、P2分别为进气腔和排气腔压力;T0、T1、T2分别为外界环境、进气腔和排气腔温度;b1、b2分别为进气腔和排气腔临界压力比;Ps为等效力源压力;P0为标准大气压。
3.1.2 压力变化方程
由理想气体状态方程、热力学第一定律和能量守恒定律,压力恒定的气源向一定容积腔体绝热充气的能量方程[6]为:
(6)
(7)
由式(6)和(7)得进气腔与排气腔压力变化方程为:
(8)
(9)
式中:Qm1为进气腔气体质量流量;V10为进气腔间隙容积;A1为进气腔有效面积;Qm2为排气腔气体质量流量;V20为排气腔间隙容积;A2为排气腔有效面积;k为气体绝热系数,值为1.4;R为气体常数,值为287.1 J/(kg·K);s为气缸行程;x为活塞运动位移。
3.1.3 活塞运动方程
气缸在运动过程中,气缸内活塞主要受到两腔室压力、气缸受到的外负载力以及活塞与缸体间的摩擦力的作用,由此得活塞运动方程为:
(10)
式中:m为负载与活塞的总质量;Ff为活塞与缸体间的摩擦力;F为所有外负载力的合力。
气缸在运动过程中,摩擦力受较多因素影响,由于Stribeck摩擦模型考虑了粘滑运动、摩擦滞后以及静摩擦的作用,因此采用Stribeck模型为摩擦力模型[7],公式为:
Ff=FC+KP·V+Fstribeck·e-fexp·V
(11)
式中:FC为常数或库仑摩擦力;KP为相关摩擦系数;Fstribeck为Stribeck效应力;V为活塞冲击速度;fexp为指数衰减系数。
根据上述方程基于MATLAB/Simulink建立偏转气缸作动速度仿真模型如图5所示,仿真参数如表3所示。在保证其他参数不变的情况下,通过改变节流阀的开度大小得到偏转气缸作动速度曲线如图6所示。由图6可知,偏转气缸作动速度随节流阀开度减小而减小,当节流阀开度过小时,偏转气缸作动速度将出现波动,偏转气缸回程稳定性降低。
图5 偏转气缸作动速度模型

表3 仿真参数

图6 偏转气缸作动速度曲线
3.2 封盖回位动作仿真
将所得偏转气缸作动速度曲线数据保存为.txt格式文件,导入ADAMS/View软件中创建SPLINE样条曲线,将时间设为独立变量,根据不同的气缸作动速度,分别创建数据单元SPLINE_1、SPLINE_2、SPLINE_3、SPLINE_4、SPLINE_5,如图7所示。在偏转气缸移动副处添加驱动,设置CUBIC FITTING METHOD三次差值拟合分别调用所创建的样条曲线,对微型晶体谐振器封盖回位动作进行仿真[8],仿真时间设为0.3 s,仿真步长设为0.001 s。考虑封盖回位动作完成时的状态,故通过测量封盖质心偏转切线方向速度得到封盖回位速度曲线,如图8所示。由图8可知,封盖回位速度先随时间呈波动上升,后逐渐稳定。
图7 创建数据单元
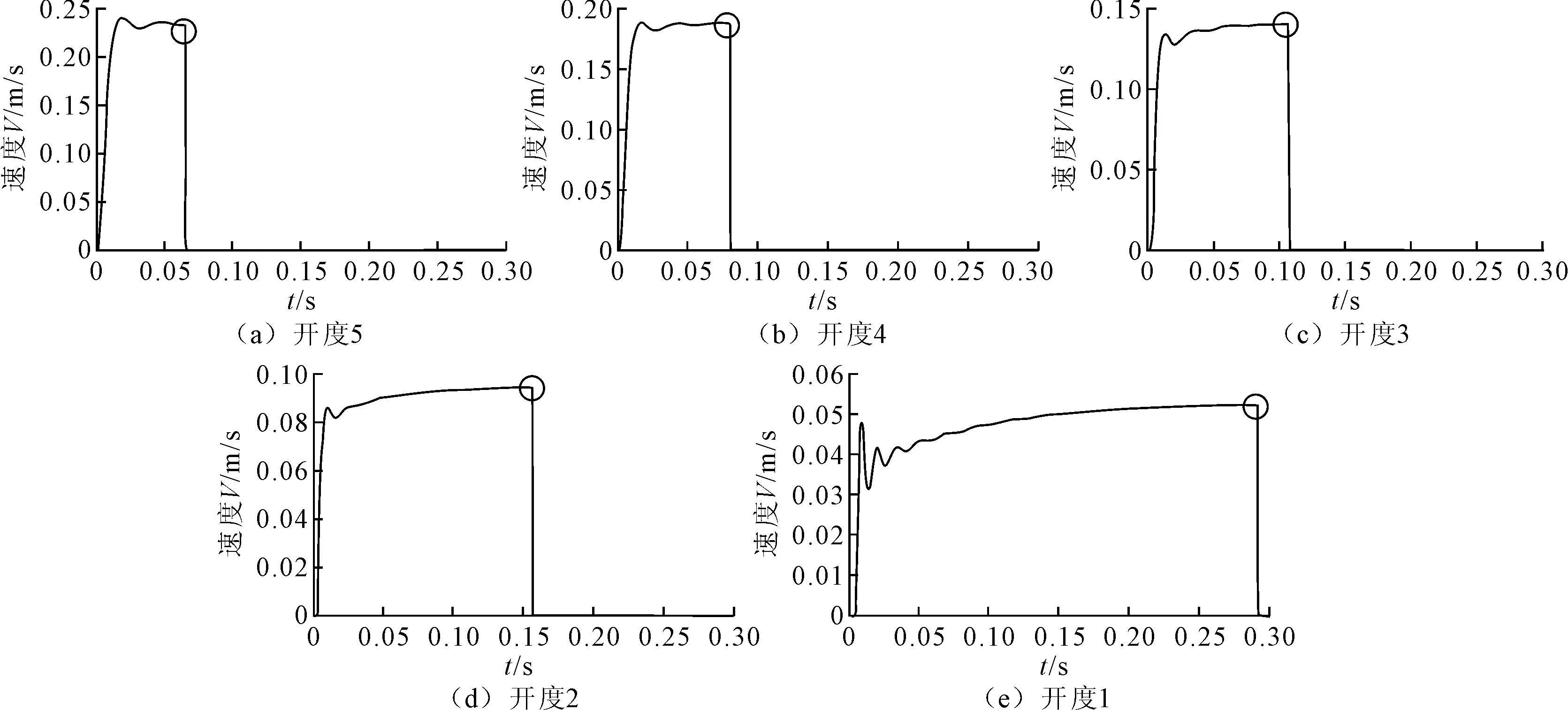
图8 封盖回位速度曲线
4 封盖移载机械手移载精度分析
4.1 封盖移载误差模型
封盖移载机械手基于真空吸取原理,采用真空泵对吸嘴腔体抽负真空,其真空度可达20~40 kPa[9],吸嘴从供料振动盘吸取封盖并通过真空压力表检测吸嘴腔内真空度,当真空度达到所设定值Pl时,可认为吸取动作完成,吸取动作完成后吸嘴回位。研究的微型晶体谐振器封盖质量m=4.3×10-3g,封盖与吸嘴间的摩擦系数μ取0.1[10],吸嘴吸取面积S为5×10-7mm2,重力加速度g取9.81 mm2/s,安全系数K取5。
封盖回位时的动能El为:
(12)
式中:Vl为封盖回位速度;m为封盖质量。
根据动能定理,认为封盖动能El在理想情况下全部转化为封盖与吸嘴由摩擦产生的内能U,即El=U,其中U为:
U=Fl
(13)
F=μ(PlS-mg)
(14)
联立式(12)与式(13)、式(14)得式(15),可知封盖移载误差量l仅取决于真空度Pl与封盖回位速度Vl:
(15)
4.2 封盖移载精度分析
由于封盖偏移发生在回位动作完成时,故取封盖回位速度曲线末位状态值作为封盖回位速度Vl,得到不同节流阀开度下的封盖回位速度,如表4所示。将表4中封盖回位速度代入所建封盖移载误差模型式(15)求解,得到不同节流阀开度下的封盖移载误差量,如表5所示。由表5可知,当节流阀选择开度1、2、3时,封盖移载误差量小于封盖最大偏移量l0,满足封盖移载精度要求,综合考虑偏转气缸回位速度波动与封盖移载效率,节流阀选择开度3可较好满足微型晶体谐振器封盖移载精度要求。

表4 谐振器封盖回位速度

表5 封盖移载误差量
5 结论
针对微型晶体谐振器封装工艺过程中的封盖移载偏移现象,建立了微型晶体谐振器封盖移载误差模型,通过对封盖移载机械手运动仿真模型与偏转气缸作动速度模型联合仿真,分析微型晶体谐振器封盖移载精度,得到节流阀开度与封盖移载误差量对应关系,为微型晶体谐振器封盖移载机械手移载精度控制提供了设计依据,提高了物理样机设计和调试效率。
