智能喷漆机器人系统
2020-07-14王硕陈克文
王硕 陈克文
目前车身喷漆的方式主要有两种:1、传统的手动喷漆;2、机器人自动喷漆。传统的手动喷漆主要用于汽车的维修行业,其缺点:1、成本高;2效率低;3对操作者的健康有一定的危害。在整车生产环节多用机器人自动喷漆方式,机器人自动喷漆方式在汽车生产线上最为成熟,但是不适合于汽车的维修行业。
本文将介绍一种结构相对简单、适合于汽车维修行业、成本低、操控性好、安全可靠、喷漆效率高的智能喷漆机器人系统,以满足汽车维修行业喷漆需要。
本智能喷漆机器人系统,能够满足汽车维修喷漆要求,并达到手动喷漆效果,保证了喷漆质量,提高了工作效率,如用于4s店,可明显提升4s店整体服务水平,降低了操作人员的劳动强度,使操作人员远离漆雾区域,保证了操作人员的身心健康,安全可靠,省时省力,节能,降低产生成本。
智能喷漆机器人系统,主要结构包括:机器人(1),在机器人(1)的下端设有底座(2),机器人(1)与控制器(4)相接,控制器(4)与处理器(8)相接,处理器(8)与深度相机(3)相接,在机器人(1)的上端通过法兰盘(7)与连接轴(9)的一端相接,连接轴(9)的另一端接有安装座(6),喷漆枪(18)的安装轴插入所述的安装座(6)内部上下方向设置的长孔内,在安装座(6)的一侧设有对喷漆枪(18)的安装轴进行定位的定位螺钉(10),在安装座(6)的另一侧通过销轴(19)与限位臂(15)的一端转动连接,限位臂(15)的另一端连接有限位轴(20),限位轴(20)支撑在喷漆枪(18)的安装轴处,在限位臂(15)的中部与安装座(6)之间设有分度销(16),与气动装置相接的气缸(17)固定安装在安装座(6)上,与气缸(17)相配的活塞杆(11)的外端头通过连接件(12)与拨动杆(13)相接,拨动杆(13)与喷漆枪(18)上的板机(21)相配。
处理器(8)首先通过深度相机(3)获取汽车喷漆维修区域的三维点云模型,对三维点云数据进行去噪、平滑等预处理,然后通過一整套算法提取三维点云数据特征点,进而计算喷漆机器人的喷漆运动轨迹。同时,需标定深度相机(3)坐标系与喷漆机器人坐标系的相对位置关系,最后控制喷漆机器人沿着自动规划的运动轨迹进行运动并完成喷漆。
附图说明
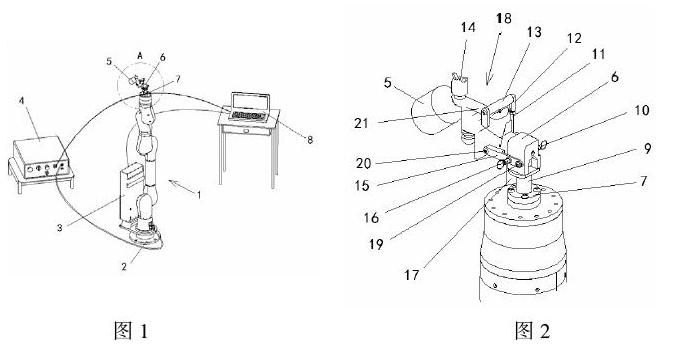
图1是本实用新型具体实施方式的结构示意图;
图2是图1所示的A部放大示意图;
具体实施方式
如图1、2所示:智能喷漆机器人系统,在机器人(1)的下端设有底座2,安装时通过底座(2)和地脚螺栓将机器人(1)固定安装于基础上。
机器人(1)与控制器(4)相接,控制器(4)与处理器(8)相接,处理器(8)与深度相机(3)相接。
在机器人(1)的上端通过法兰盘(7)与连接轴(9)的一端相接,连接轴(9)的另一端固定连接有安装座(6)。
接有储漆筒(5)的喷漆枪(18)的安装轴插入安装座(6)内部上下方向设置的长孔内,在安装座(6)的一侧设有对喷漆枪(18)的安装轴进行定位的定位螺钉(10),定位螺钉(10)与安装座(6)螺纹连接,定位螺钉(10)的内端头顶入喷漆枪18的安装轴上的凹坑内,使喷漆枪(18)的安装轴可相对于安装座(6)转动。在安装座(6)的另一侧通过销轴(19)与限位臂(15)的一端转动连接,限位臂(15)的另一端连接有限位轴(20),限位轴20支撑在喷漆枪(18)的安装轴处,用于对喷漆枪(18)的安装轴进行支撑,即支撑了整个喷漆枪(18)。在限位臂(15)的中部与安装座(6)之间设有分度销(16),分度销(16)内端头顶靠在安装座(6)侧面上的凹槽内,使限位臂(15)相对于安装座(6)相对固定,分度销(16)上可套装有复位弹簧,向外侧拉动分度销(16)时,克服复位弹簧的弹力,使分度销(16)的内端头离开安装座(6)侧面上的凹槽,松开时,在复位弹簧作用下分度销(16)内端头自动顶靠在安装座(6)侧面上的凹槽内,限位臂(15)通过限位轴(20)可对喷漆枪(18)进行支撑,拉开分度销(16)时,可解除对喷漆枪(18)的定位,喷漆枪(18)可相对于安装座(6)松动,方便拆卸换漆及清洗。
与气动装置相接的气缸(17)固定安装在安装座(6)上,与气缸(17)相配的活塞杆(11)的外端头通过连接件(12)与拨动杆(13)相接,拨动杆(13)与喷漆枪(18)上的板机(21)相配,气缸(17)带动活塞杆(13)回缩时,可通过拨动杆(13)下压板机(21),使喷漆枪(18)从喷漆口(14)喷漆。其中喷漆枪(18)为常用的手动喷漆枪。机器人(1)为协作机器人。
工作过程:此套系统将深度相机安装在喷漆机器人底盘处。处理器(8)首先通过深度相机(3)获取汽车喷漆维修区域的三维点云模型,对三维点云数据进行去噪、平滑等预处理,然后通过一整套算法提取三维点云数据特征点,进而计算喷漆机器人的喷漆运动轨迹并标定深度相机坐标系与喷漆机器人1坐标系的相对位置关系(即统一坐标系),最后控制喷漆机器人沿着自动规划的运动轨迹进行匀速运动并通过控制器(4)控制气动装置,带动气缸(17)、板机(21)动作,完成喷漆。具有安全可靠,省时省力,节能环保,降低产生成本的优点。
本系统适合应用在汽车维修领域的喷漆、补漆,操作简单,能够改善喷漆工人在有毒有害气体环境下工作的条件,减少喷漆工作的职业危害,实现用智能科技引领绿色环保汽车售后维修市场的目标,随着科技的发展机器人终将代替人去完成危险或对人体有危害的作业,本文也希望能对工业的进步提出些问题,提供一些帮助。
(作者单位:1.斯凯孚(大连)轴承与精密技术产品有限公司;2.爱康普科技(大连)有限公司)
