管道下穿高铁桥墩施工变形监测方案研究
2020-07-05桑文刚李玉斌黄黎明赵培华张帅
桑文刚,李玉斌,黄黎明,赵培华,张帅
(山东建筑大学 测绘地理信息学院,山东 济南250101)
0 引言
统计表明,截至2018年底中国高速铁路总里程已达29 000 km,居世界首位[1]。高速铁路在给人们生活带来快捷便利的同时,也对其整个运营期间的安全监测提出了更高要求。但伴随着城市化进程的不断加快,水、电、气及通讯管道下穿既有高速铁路的情况时有发生,在项目施工过程中会对铁路桥梁桩基及桥墩的稳定性产生一定的影响。为了确保铁路的安全性及稳定性,保证高铁的安全运营,保障人民群众的生命财产安全,必须在施工期对施工影响范围内的高铁桥墩开展高精度变形监测,而采用免受施工干扰且快速、高精度、高可靠性的变形监测方案,是保障施工期间高速铁路安全稳定的有效途径。
目前,全球导航卫星系统 GNSS(Global Navigation Satellite System)技术能够实现高精度、长周期自动连续监测,在高铁前期勘探及施工期是进行CP0、CPI、CPII控制网布测的主要手段[2-3],但是受环境因素及卫星信号遮挡影响,难以满足下穿高铁桥墩施工期监测的要求。摄影测量及三维激光扫描技术可以通过非接触手段快速获取监测对象更为丰富的面测量数据,但其测量精度随着观测距离的增加而大打折扣[4],精度、可靠性有待进一步提高。精密水准仪获取的沉降监测数据精度高,却无法同时测量水平位移的变化,难以在时间维度与水平位移监测实现同步观测。测量机器人是集自动识别、精确照准、自动获取角度与距离等功能于一体的高精度电子全站仪[5],在一定观测条件下,能高效获取目标点的三维坐标信息,且凭借其高精度、自动搜索与精确照准等优点,非常适合边坡、大坝、基坑、桥墩、隧道等工程的三维变形监测[6-10]。但下穿高铁桥墩管道施工具有周期短、大型开挖设备施工影响大以及高铁周边以农田为主,地质条件差,基准站选址困难等特殊性,因此文章结合供水管道穿越京沪高铁徐州某段施工专项变形监测项目,在满足标准和技术设计方案要求的基础上有针对性地进行监测方案设计,并对监测结果进行精度分析和数据预测。
1 管道下穿高铁桥墩施工变形监测方案设计
京沪高速铁路徐州某段因供水管道扩建,需要下穿施工,项目涉及26#、27#两个桥墩,跨度中心采用放坡明挖方式穿越铁路,并与京沪高铁线路成90°夹角,其基坑开挖深度为2.5 m。为了保证施工过程中以及竣工之后京沪高铁的安全运营,必须对该段高速铁路开展安全变形监测。依据GB 50026—2007《工程测量规范》[11]和JGJ 8—2016《建筑变形测量规范》[12]中相关规定,同时为了及时反馈监测信息确保高速铁路的稳定与高铁的安全运行,根据铁路管理部门要求及相关管理办法制定本工程的监测控制值,并分别将控制值的60%、75%、90%作为黄色、橙色、红色三级预警。水平及垂直位移监测的黄色、橙色和红色预警值分别为0.60、0.75和0.90 mm,其限值为1.00 mm。
考虑到不同阶段对高速铁路稳定性产生的影响不同,根据施工进度在不同阶段采用不同的监测频率。施工之前,测量4次确定初始值;施工过程中,每天测量4次;施工结束后,每天测量2次。
由于项目不仅精度要求较高,而且施工工期短,仅为10 d,此外高铁沿线左右两侧50m范围内为绿化带及果树林,地质条件及通视条件较差,施工过程中还面临着开挖设备、建材的干扰,因此需要有针对性地进行监测方案设计。
1.1 监测方式
为了满足高铁桥墩高精度变形监测的要求,在仪器设备方面选用测角和测距精度分别为±0.5″和±0.6 mm+1 ppm的徕卡TS 50高精密测量型机器人,该仪器具备自动搜索目标与量测功能,可有效减少人工照准等误差的影响,同步实现水平及垂直方向位移监测。为避免对中误差等的影响,依据规范需建立观测墩,并配备强制对中设备,但考虑到施工期短,观测墩无法长时间静置稳定,以及监测期间高铁高速通过及大型设备开挖震动的持续影响,采用基于后方交会原理的自由设站法,通过观测基准点,实现自由设站方式下的观测站定位,有效地减弱了每期观测时安置仪器潜在的对中误差;每次观测采用正倒镜观测法观测两个测回,边角同测,基于极坐标法同步确定监测点三维坐标[13]。为减弱温度、气压等环境因素对仪器测量定位精度的影响,应考虑季节及天气等因素,根据观测频率选择观测时段,并配备温度计与气压计进行温度、气压及湿度的观测与改正[14]。此外,为了方便分析各期监测数据,需根据铁路走向建立独立坐标系。
1.2 监测网的建立
监测点分布如图1所示,供水管道将下穿26#、27#桥墩施工,因此在重点监测对象26#、27#桥墩墩身两侧及中间部位分别设置4个监测点(D 26-1、D 26-2、D 26-3、D 26-4和D 27-1、D 27-2、D 27-3、D 27-4),次重点监测对象25#、28#墩身两侧分别设置2个监测点(D 25-1、D 25-2和D 28-1、D 28-2),共计12个位移监测点,采用成本较低且隐蔽性较好的L型监测小棱镜固定在监测点上。为了提高监测数据的准确性和监测的连续性,在监测范围的东西两侧分别设置固定观测墩,并配置强制对中设备,在保证测站稳定的同时,可以有效消除测量机器人马达转动以及仪器对中引入的误差。考虑到现场除京沪高铁及农田之外再无其他建筑,因此基准点(JZDW 1、JZDW 2、JZDW 3、JZDE 1、JZDE 2、JZDE 3)只能布置在远离施工影响区且通视条件良好的24#、29#和30#高铁桥墩上。同时,为了直观反映位移变化量分别在高速铁路顺桥向与横桥向的大小,以平行于铁路轴线方向(南北方向)为x轴,以垂直于铁路轴线方向(东西方向)为y轴,按照左手原则建立独立空间直角坐标系,如图2所示。图中α为水平角、β为竖直角、p为监测点。
在实施监测前,观测墩及监测小棱镜经过静置稳定后,采用后方交会法及极坐标法分别确定测站点及监测点的三维坐标。经多期观测并进行稳定性分析,取监测点坐标与初始坐标作差计算位移量[15]。
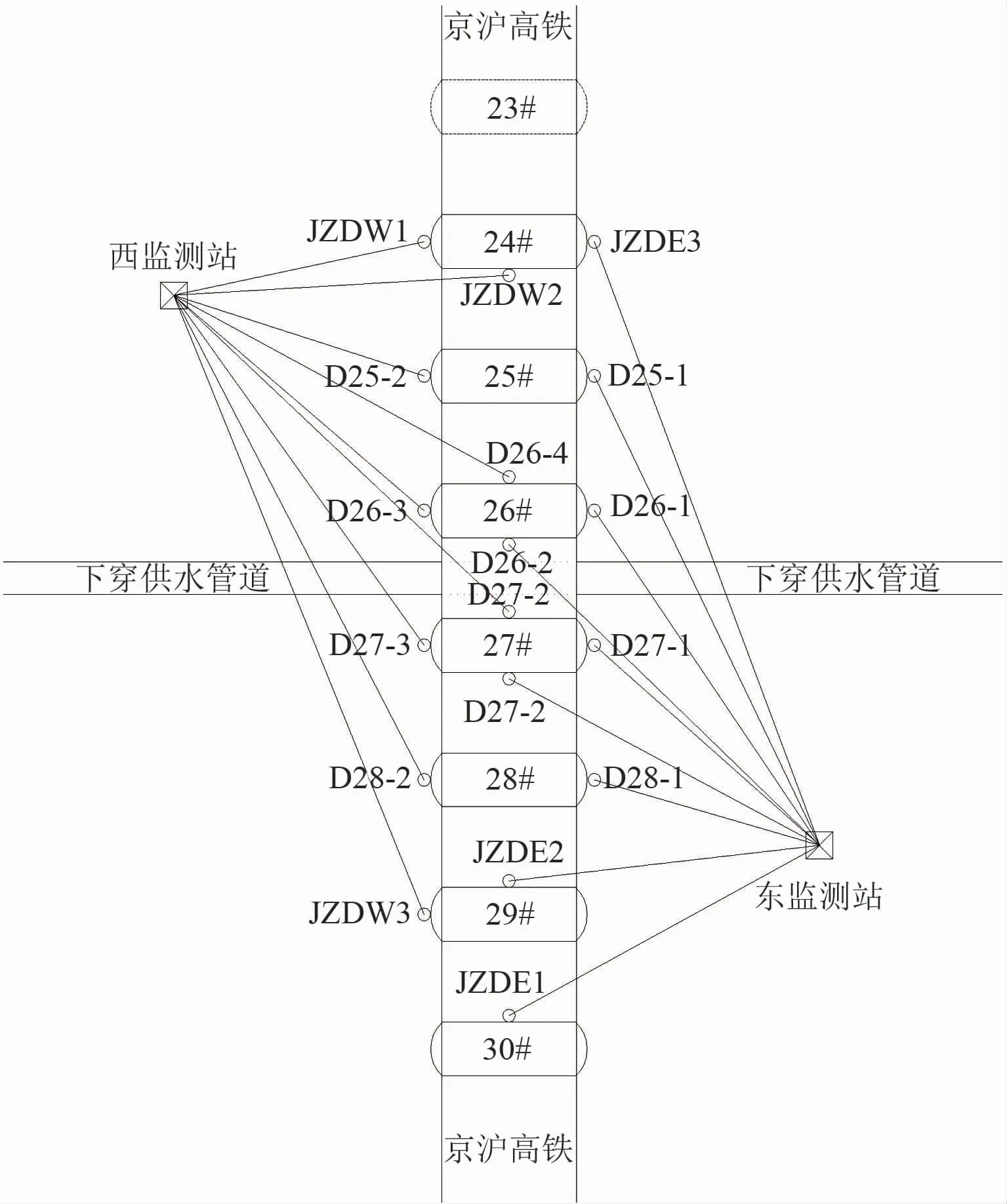
图1 监测点分布示意图
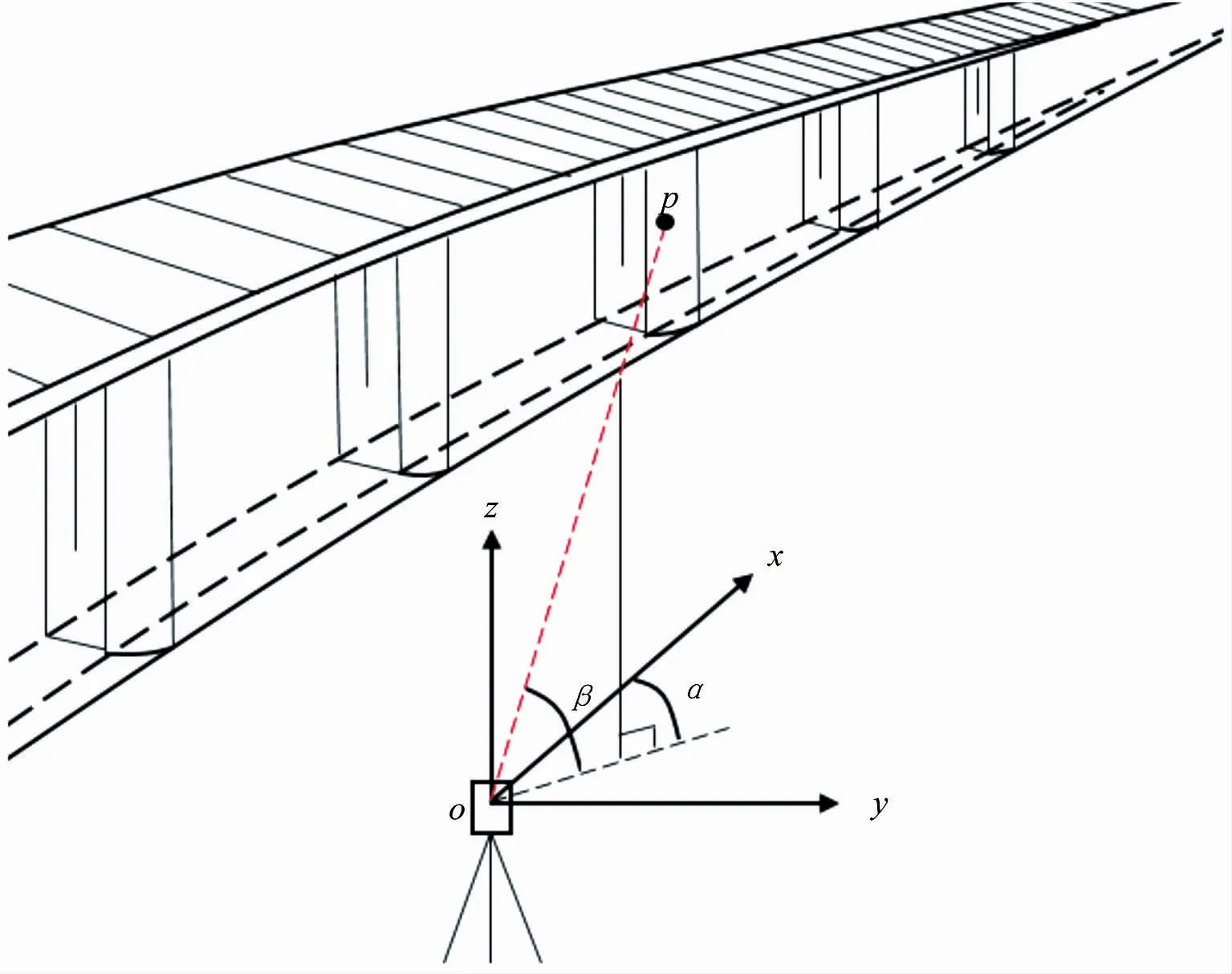
图2 独立空间直角坐标系示意图
2 管道下穿高铁桥墩施工变形监测原理及预测方法
2.1 位移监测原理
设经后方交会后确定测站点的三维坐标为(xCZ,yCZ,zCZ),在建立的独立坐标系下测量机器人,利用极坐标法测定各监测点的三维坐标(xi,yi,zi)可由式(1)[16]表示为
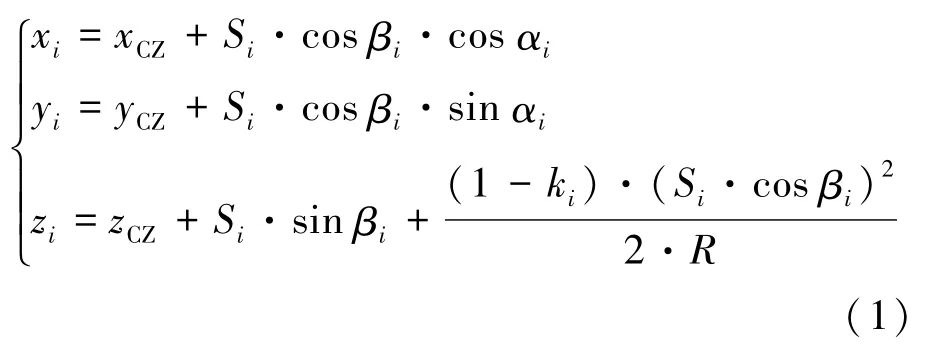
式中:Si为斜距,m;βi为竖直角,°;αi为水平角,°;ki为大气折光系数;R为地球半径,m。
为了削弱地球曲率和大气折光对高差观测值的影响,每天的观测都应避开日出、日落及太阳中天时段,选择固定时段进行观测,同时进行温度、气压及湿度改正[17]。
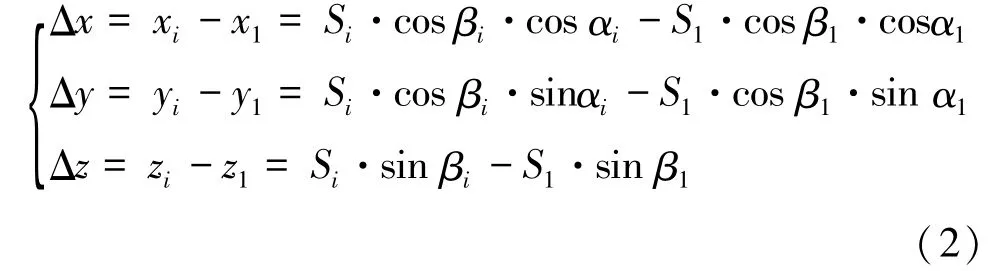
将测量机器人测得的监测点第i周期的三维坐标与初始坐标相减,可得监测点的位移观测量,由式(2)表示为
2.2 基于卡尔曼滤波形变预测方法
变形监测不仅要采用高精度的仪器设备及科学方法,实现变形量的精确获取,而且还需要对变形趋势进行预测预报。考虑到变形监测的动态及准动态特性,可以利用卡尔曼滤波进行预测。卡尔曼滤波是在噪声存在的情况下通过对系统状态的不断预测与不断修正,在测量值和预测值之间寻求最佳估值的递归算法,是当前应用最广泛的一种动态数据处理方法,具有最小无偏差性,在变形监测数据处理方面得到了广泛应用。考虑到高铁桥墩整体较为稳定,变形量相对较小,因此将监测点的位移视为状态向量,将监测点变形速度视为随机干扰,建立卡尔曼滤波模型。高速铁路桥墩的基础十分牢固,桥墩上监测点的位移过程可以视为一个随机过程。离散线性卡尔曼滤波的数学模型由状态方程和观测方程组成,分别由式(3)和(4)表示为

式中:Xk为系统状态向量;Zk为系统观测向量;A为系统状态转移矩阵;Γ为动态噪声矩阵;H为观测方程系数矩阵;Wk和Vk分别为动态噪声和测量噪声,视为互不相关,服从均值为零,方差分别为Q和R的高斯白噪声序列。
根据最小二乘原理,可得离散线性卡尔曼滤波的工作原理及其递推公式[18]。
状态估计值一步预测由式(5)表示为

误差协方差矩阵一步预测由式(6)表示为

卡尔曼增益的计算由式(7)表示为
状态估计值的更新由式(8)表示为

误差协方差矩阵的更新由式(9)表示为

通常将式(5)和(6)称为状态更新方程,卡尔曼滤波利用前一时刻的状态估计值和误差协方差矩阵推算当前时刻的状态估计值和误差协方差矩阵,为下一步运算提供先验估计;将式(7)~(9)称为测量更新方程,卡尔曼滤波结合新的观测值修正先验估计来获得最优估计。在给定状态估计及其对应误差协方差矩阵的初始值之后,可以根据卡尔曼滤波递推算法,结合观测值实现数据的滤波与预测。可以看出,卡尔曼滤波的计算过程只使用最新的信息,因此只需很小的数据存储量。
3 管道下穿高铁桥墩施工变形监测精度及预测分析
考虑到监测项目的精度要求比较高且关系到高铁的安全运营,因此必须对监测方案进行精度验证。高精度变形监测的数据中不可避免地会存在温度变化、风力等随机扰动误差的影响。为了尽可能地反映高速铁路变形监测系统的真实变形规律,可以利用卡尔曼滤波对变形监测数据进行处理,剔除随机误差;同时前期的监测数据必然与后期的监测数据存在一定的内在联系,可以通过前期大量监测数据建立合理的卡尔曼滤波模型,揭示变形体内在的运动规律,进而实现监测数据的科学预测。
3.1 监测方案精度验证
对于式(1)和(2),由于观测墩与监测棱镜相对稳定,故Si≈S1=S、βi≈β1=β、αi≈α1=α、mSi≈m1=mS、mβi≈mβ1=mβ、mαi≈mα1=mα。其中,mS为测距精度,mβ为竖直角观测精度,mα为水平角观测精度。根据误差传播定律可得x、y、z及水平方向位移观测值精度,由式(10)~(13)表示为
式中:ρ为常数,表示弧度对应的秒值。在监测网布置完成后正式施工之前,每天在固定观测墩安置仪器,利用测量机器人的多测回测角功能自动采集基准点及监测点的水平角、竖直角和斜距等数据信息,对监测技术方案的实测精度进行验证。根据式(10)~(13),利用Matlab编程计算监测点水平及垂直方向位移观测值精度。结果表明,水平、垂直方向位移观测值精度最大值分别为0.83和0.85mm,均小于监测方案中给出的1.0 mm精度要求,监测方案切实可行。
3.2 监测数据精度分析
选取测量机器人在施工期间(2018年10月24日—11月3日)采集的监测数据,计算监测点的三维坐标分量中误差,并对其进行分析,见表1。根据监测要求,在施工期间每天进行4次观测,取其平均值作为最终监测结果。由误差传播定律可知,理论上此时的观测精度提高两倍。
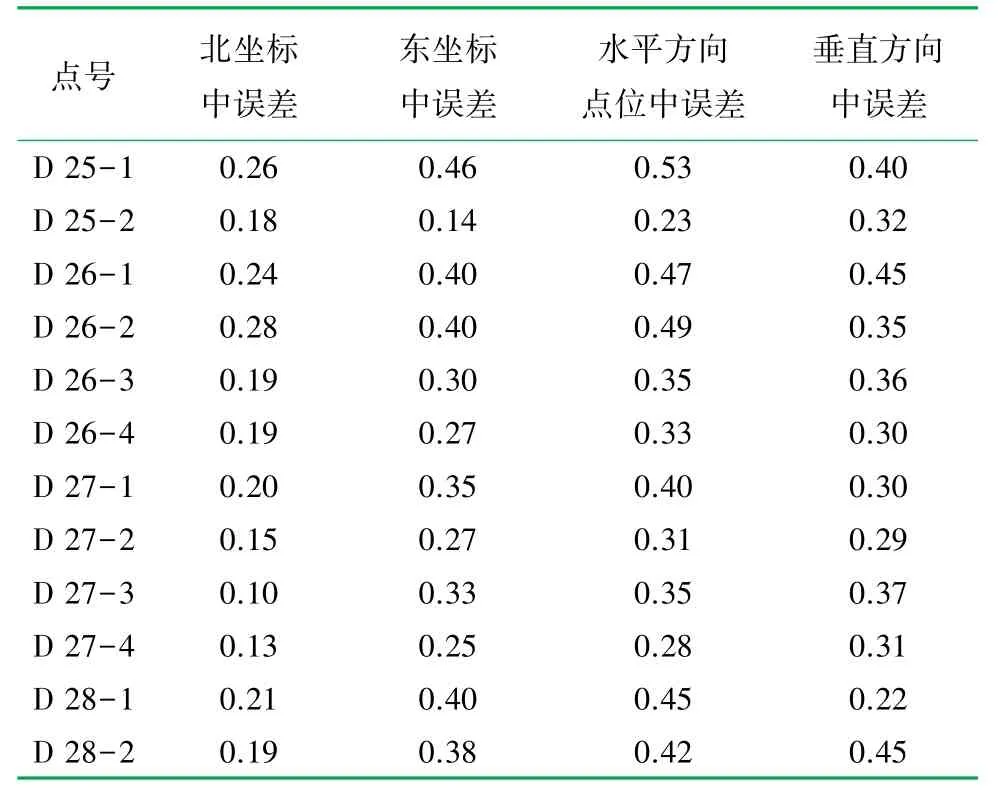
表1 施工期间监测点三维坐标分量中误差表/mm
从表1中数据可知,施工期间监测点的水平、垂直方向点位中误差最大值分别为0.53和0.45 mm,小于GB 50026—2007[11]中二等变形监测水平方向点位中误差3.0 mm和垂直方向高程中误差0.5 mm的限值,完全满足二等变形监测的精度要求。
3.3 监测数据汇总与分析
依据设计的监测方案,2018年9月22日—12月5日在施工前、施工过程中及施工结束后,对施工影响范围内的高铁桥墩连续进行了75期变形监测,监测期间的水平及垂直位移累积变化量见表2。
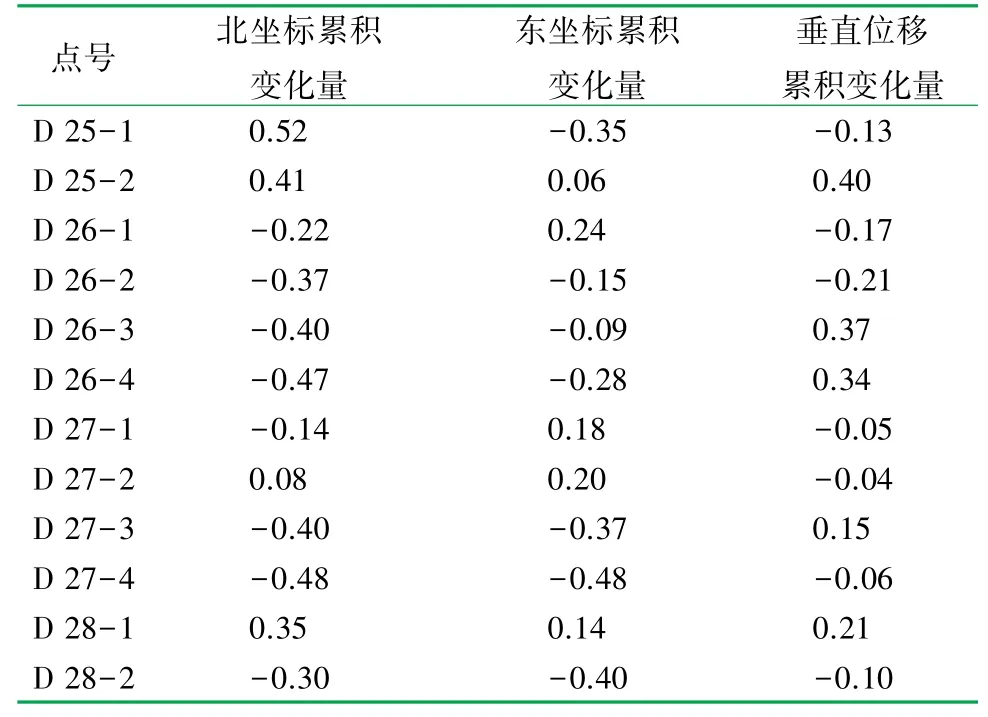
表2 水平位移和垂直位移累积量汇总表/mm
从表2中监测数据分析可知,供水管道穿越京沪线桥墩监测点的北坐标最大累积水平位移点是25号墩的1号点(D 25-1),其北坐标水平位移量为0.52 mm;东坐标最大累积位移点是27号墩的4号点(D 27-4),其东坐标水平位移量为-0.48 mm;最大累积垂直位移点是25号墩的2号点(D 25-2),其垂直位移量为0.40mm,3个方向的累积位移量均很小,说明供水管道下穿京沪线施工对京沪高速铁路的影响很小。此外,选取最具有代表性的施工期间监测数据进行分析,绘制了各监测点的水平及垂直方向位移监测曲线图,如图3所示。
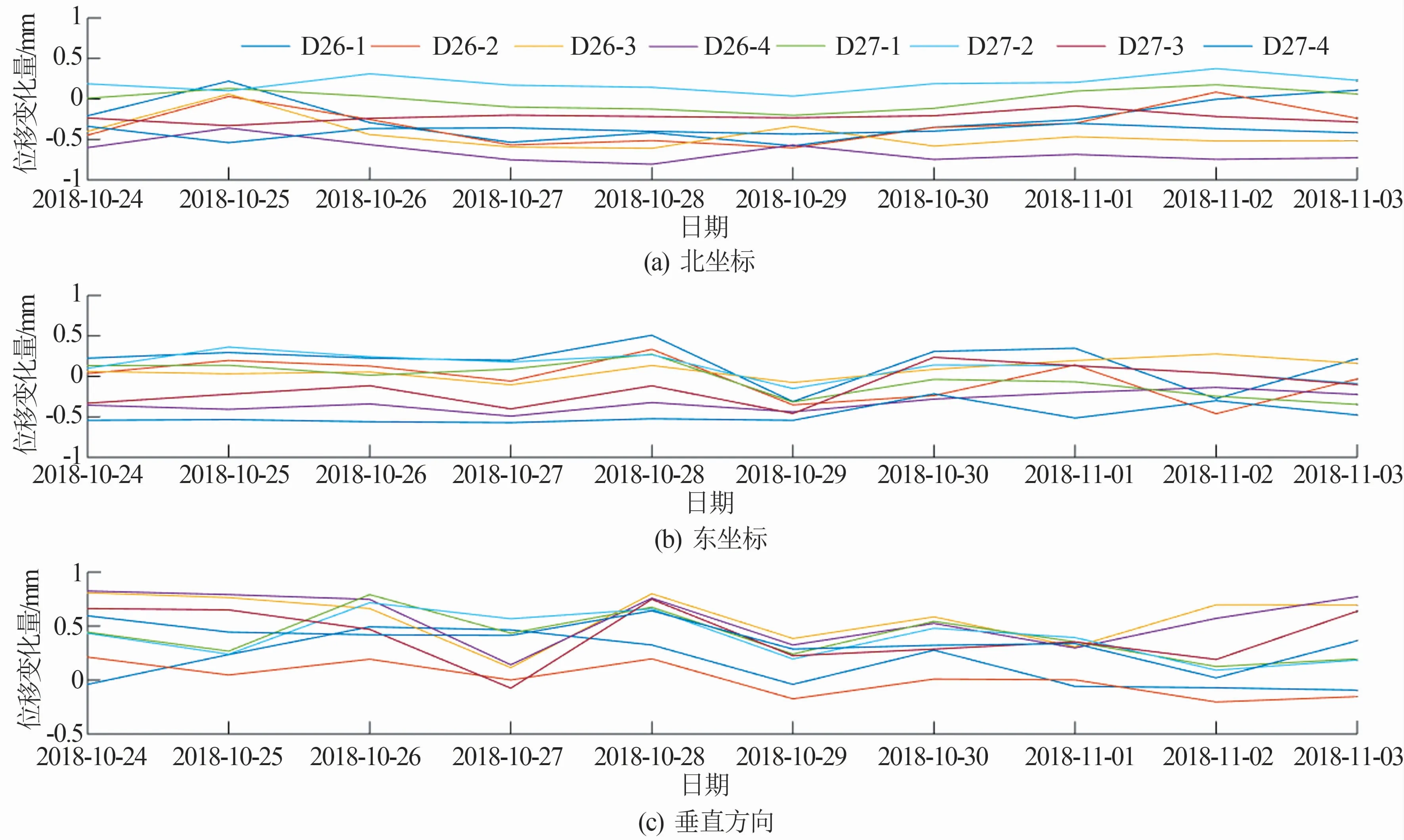
图3 3个方向时间—位移曲线图
根据图3分析可知,监测期间桥墩水平及垂直方向位移变化整体上比较平稳,仅在供水管道下穿施工的10 d内,受施工影响,呈现小幅波动,但由于高铁桥墩基础设计及施工要求较高,且经过多年运营,较为稳定可靠,该波动幅值为0.02~0.64 mm,低于监测方案中给定的1.0mm限值,保证了工程顺利进行。
3.4 卡尔曼滤波模型建立及数据预测
考虑到滤波初始值的选取可能直接影响滤波的稳定性及收敛速度,因此按照以下原则确定滤波初始值:系统过程状态不随时间变化,因此系统状态转移矩阵A确定为1;包含噪声的观测值可以视为状态变量的直接体现,因此观测矩阵H为1;根据监测方案中给出的精度要求以及徕卡TS50测量机器人的测量精度将测量误差视为均值为零,方差为0.6的高斯白噪声序列;根据经验统计及试算,将过程噪声确定为均值为零,方差为1的高斯白噪声序列;滤波模型的初始状态估计值X︿k0=0.138及其对应的初始方差阵P0=0.019,其值由前五期原始监测数据的均值和方差确定[19]。
现以高速铁路桥墩其中一个监测点(D25-1)在整个监测过程中75期垂直方向位移的监测数据为例,建立了卡尔曼滤波模型,并对整个监测系统进行分析。以前5期原始监测数据确定滤波初始值建立模型,对整个监测周期的数据进行滤波,对后5期数据进行预测,并将原始观测值与预测值作对比。其观测值、卡尔曼滤波值、卡尔曼预测值和卡尔曼预测值与观测值的差值以及卡尔曼增益的曲线如图4所示,基于卡尔曼滤波模型的数据预测结果见表3。
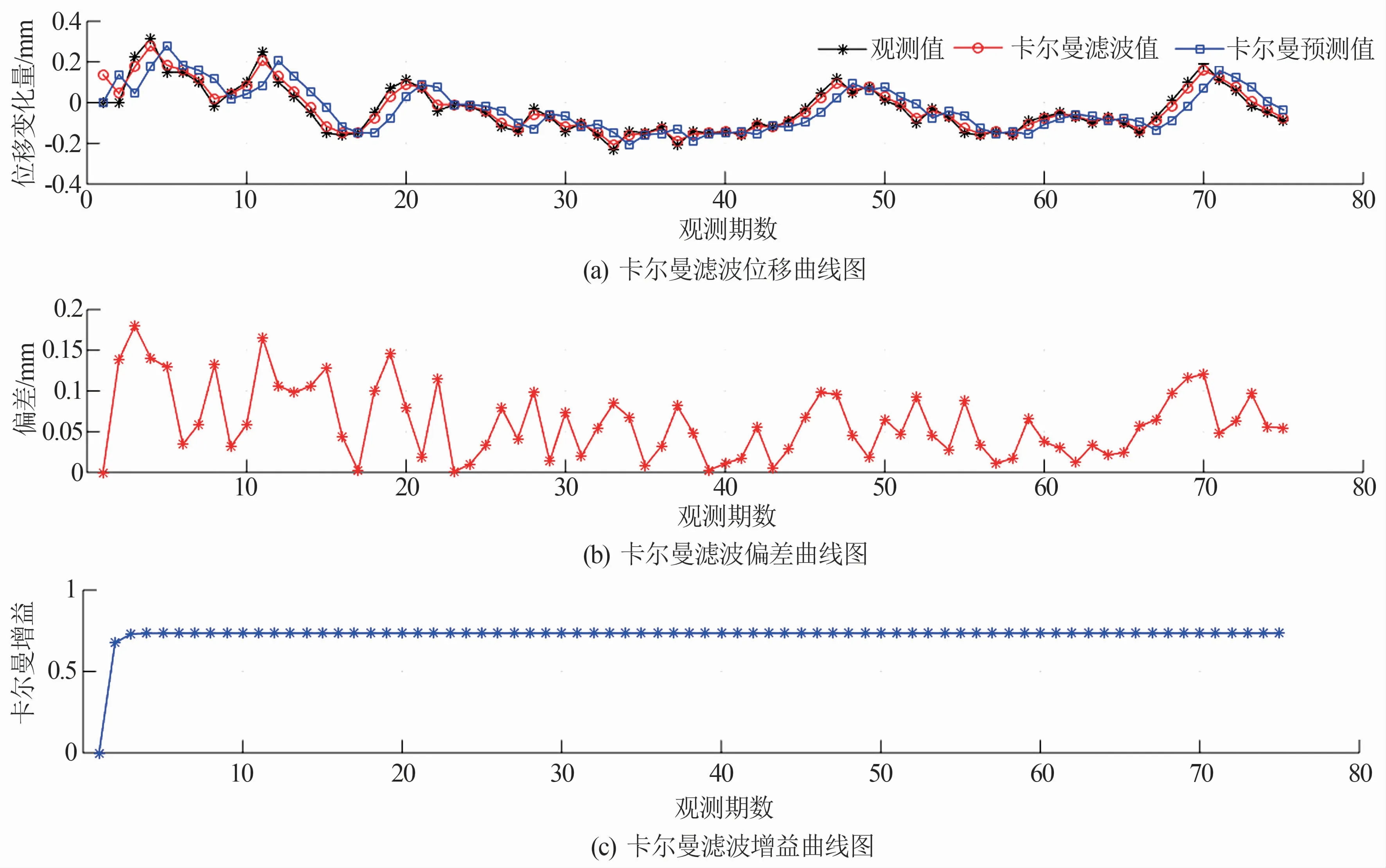
图4 D25-1监测点垂直方向位移监测数据卡尔曼滤波结果图
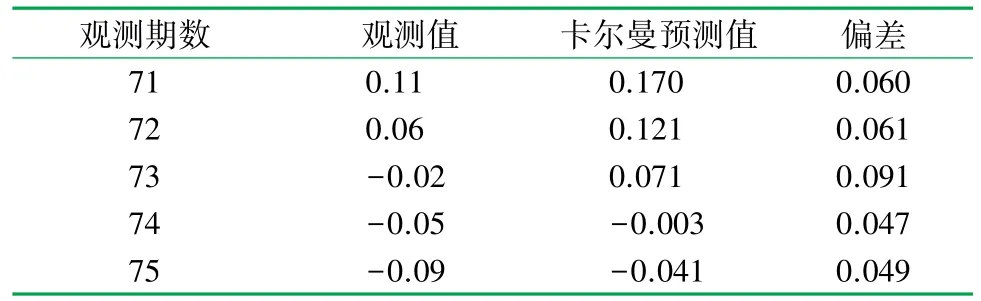
表3 基于卡尔曼滤波模型的数据预测结果表/mm
从图4可知,D25-1监测点垂直方向卡尔曼预测值、卡尔曼滤波值与原始观测数据曲线的变化趋势十分吻合,同时卡尔曼增益在经过三四次递推运算之后迅速收敛且其值保持在约0.8。从图4中卡尔曼滤波预测偏差曲线及表3中数据可以看出,卡尔曼预测值与原始观测值的差值均很小且无发散现象,最后5期预测数据的偏差最大值<0.1 mm。这说明所建立的卡尔曼滤波模型是可靠的,所选取的滤波初始值也是合理的,能够较好地反映测量机器人变形监测的实际情况,体现京沪高速铁路在管道下穿施工期的变化规律,同时对监测数据实现精准预测。
4 结论
通过上述研究可知:
(1)设计的变形监测方案可实现水平、垂直方向分别<0.53和0.45 mm精度,较好满足二等变形监测的精度要求,并在供水管道下穿施工期监测期间有效反映了京沪高速铁路桥墩的真实位移情况,为供水管道穿越京沪线施工顺利提供了有力保障。
(2)建立的卡尔曼滤波模型具有较高的拟合与预测精度,随着递推运算次数的增加,卡尔曼滤波预测值与原始观测值的偏差呈现出逐渐变小至趋于稳定的趋势,最后5期数据偏差的最大值<0.1 mm。
(3)建立的变形监测方案可快速构建且基本不受施工干扰,适用于类似高铁桥墩等高精度变形监测领域,可在类似的变形监测领域加以推广应用。
