校园导游智能小车
2020-06-27贺森
贺森 安徽省合肥一六八玫瑰园学校信息技术教师,市级学科带头人、骨干教师,合肥市STEAM实验学校骨干教师,合肥市信息技术教师培训基地专家,曾获第五届全国小学信息技术优质课一等奖、一师一优课部级优课、安徽省信息技术优质课一等奖、安徽省多媒体教学设备维护技能竞赛中获一等奖;多次参与安徽省小学信息技术教师用书编写工作;曾担任安徽省“乡村教师信息化大赛”专家评委、合肥市“小学信息技术教材”培训专家;主持的两个省级课题,均已结题;撰写的多篇STEAM、创客论文获省级奖。
课程特色
本课是“探秘智能车”项目课程的第三课时,学生通过探索实现智能小车自动识别线路,根据线路情况做出相应的动作,以达到智能行驶的效果。本课时通过问题情境引入,让学生完成设计路线、组装小车、编译程序、控制小车在各个时刻的运动,以达到自动循迹目的,培养学生综合运用科学、技术、工程、数学和艺术等学科知识完成任务的能力。
教学目标
知识与技能
1.认识循迹模块,理解智能小车循迹的工作原理。
2.会安装循迹模块,能编写和调试程序实现小车循迹功能。
过程与方法
1.通过规划设计路线、识别路线、沿线行进、迭代完善,培养学生的科学、技术和工程思维。
2.通过理解循迹模块四种循迹现象,掌握判断小车与线道的位置关系的方法,并通过编写程序实现小车循迹功能,培养学生的计算思维。
情感态度与价值观
1.通过设计制作校园导游智能小车,培养学生运用所学知识服务于生活的意识。
2.通过小组分工实践完成任务,培养学生合作意识,提升项目规划和实施能力。
教学重点与难点
教学重点 通过铺设线路、安装循迹模块、编写程序、迭代完善程序等步骤,达到让小车自动沿线行驶的效果。
教学难点 理解循迹模块的工作原理,通过编写调试程序,以达到智能行驶的效果。
教学过程
一、复习回顾
通过上两个课时的学习,学生已经学会组装小车,编译程序让小车实现直行和后退,并通过红外传感器实现转弯和避障。教师带领学生简要回顾前两个课时的知识。
设计意图:通过回顾学过的知识,让项目在课时之间产生串联,帮助学生快速回忆已知,为新知学习做好铺垫。
二、创设情境
教师提出问题:我们学校经常有客人来访,他们对学校的环境不熟悉,想要快速到达想去的地方,真不是一件容易的事。能不能用我们学过的知识,设计一个会带路的智能小车,让它具有向导的功能呢?如果要让小车实现校园迎宾引导的功能,我们需要什么技术呢?
预设学生答案:让小车能按指定路线行驶。
教师播放小车循迹视频,学生观察视频中小车的行进方式。
小组讨论:如何让小车按照指定路线自动行进呢?
小组汇报:先规划引导路线,铺设黑色线条状的线路,再让小车识别线路,最后沿线路行驶到指定位置。
教师总结:我们要先设计路线,然后让小车识别路线后沿线行进。
设计意图:通过创设情境,激发学生的参与意识,营造一种学习氛围,帮助学生形成良好的求知心理,激发学生主动参与活动。通过问题引导学生小组讨论,让学生将自己的学习、生活经验与同伴串联,在倾听中相互启发、取长补短,小组中的每个人都得到锻炼,一起进步、提高,也让信息的提取多元、多层次,让知识立体化。
三、自主规划设计
学生分小组自主规划小车行进路线,在自主学习任务单中设计草图。
四、讲授原理
1.介绍循迹模块
小车要沿线行驶,必须先能识别铺设的线路。而小车是通过循迹模块识别线路的,循迹模块就是小车的“眼睛”。
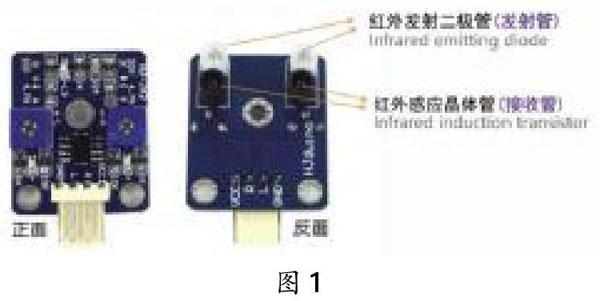
循迹模块位于小车的前部(如图1),有一组红外对管,分别是红外发射二极管和红外感应晶体管。一个负责发射信号,俗称发射管;一个负责接收信号,称为接收管。
2.讲解工作原理
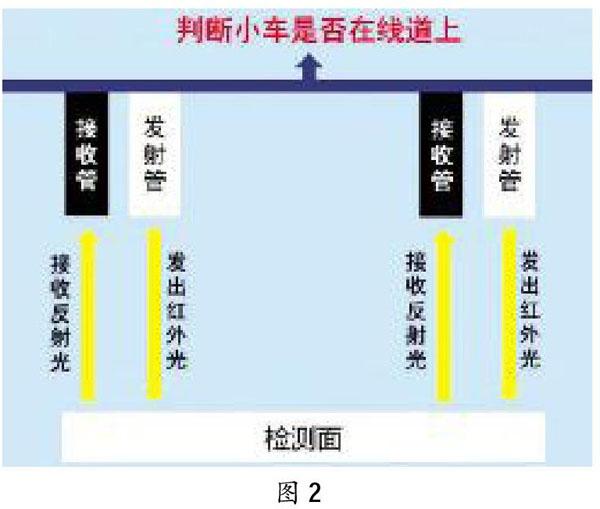
出示工作原理示意图(如图2),讲解发射管发射的红外光照射到检测面,因为白色会反光,因此信号会发射到接收管,接收管接收到信号后告知单片机,判断出小车在白色线路上。如果检测面是黑色的,发射管发射的光线被吸收,接收管接收不到光,所以判断出小车在黑色线路上。
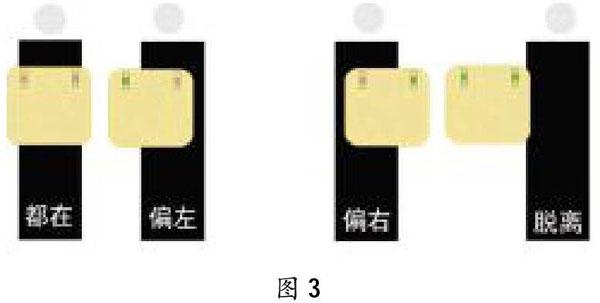
学生认识了循迹模块并知道了它的工作原理。若小车在线道上行驶,小车与线道会有几种位置关系呢?小组讨论,教师巡视。
小组汇报,其他学生补充。
教师总结循迹现象。(如图3)
设计意图:此部分内容是本课时的难点,学生从认识循迹模块,到理解工作原理,最后运用原理分析循迹现象,最终得出小车与线道的位置关系,为下一步通过编程让小車沿线行驶做好了铺垫。教师通过小组讨论、分享补充的方式引导学生自己探究发现、分析循迹现象,既培养了学生的探究意识,也让学生在倾听别人回答的同时反思自己的想法。当学生产生疑问时,再回到原理知识上,思维反复碰撞,进行思考、应用、倾听、反刍、串联、巩固,让每个学生都参与到探究学习中,让学习真正发生。
五、动手实践
1.绘流程图
我们已经能判断出小车与线道有四种位置关系,当小车处于这四种状态时,小车分别该怎么移动?请学生小组讨论,完成自主学习任务单上的流程图。
教师拍照上传小组补充绘制的流程。(如图4)
小组汇报解读绘制的流程图。
2.分工实践
教师布置任务:设计线路,让小车能沿着黑线行驶。学生从铺设黑色胶带、安装传感器、编程调试等方面进行小组分工合作,完成智能小车循迹行进。(如图5)
设计意图:通过绘制流程图可以帮助学生分解难点,把复杂问题深度剖析为简单可行的操作,培养学生的高阶思维。实践过程中,鼓励学生对项目不断迭代优化,边做边完善。
六、拓展提升
拓展任务一:小车到达目的地后能自动停止。
拓展任务二:小车到达目的地后能返回到原点。
设计意图:完成基础任务的小组,可以挑战拓展任务,通过分层设计让每个学生都得到深度发展。
七、展示评价
首先任选一小组代表介绍作品,分享设计思路、制作过程中遇到的问题和解决方法。然后其他小组进行评价,说一说设计的优点、不足及改进建议。最后教师评价总结。
设计意图:通过自评、互评、师评等多元评价,拓展学生思维,培养学生的口语表达能力。这是对学习目标达成度的评价,更是对学生参与协作学习过程的评价。
教学反思
本课以设计校园导游智能小车为起点,引导学生从生活实际需求出发,培养学生综合运用科学、技术、工程、数学和艺术等学科知识的能力,拓展学生思维,力争提升学生的思考探究、交流表达和团结协作等能力。