翻车机多轴电机同步运动控制系统研究
2020-06-24宋希亮高德鹏
宋希亮,高德鹏
(本钢板材原料厂,辽宁 本溪 117000)
翻车机是煤矿、冶金行业常用的大型设备,翻车机首先通过光电传感器检测并定位准备进行翻转的火车车厢,然后靠车板与火车倾翻一侧的车体贴合,压车梁将火车车厢边压竖向压紧,这就完成了火车车厢的抱紧操作,之后依靠连接端环齿轮的驱动系统下火车车厢被翻转倾倒货物。翻车机是通过多台直流电机共同驱动进行火车货箱反转工作的[1-2]。火车车厢翻转过程中,由于重心会实时变化,因此火车车厢对于翻车机驱动系统来说是一个时变的非线性负载。会影响多台驱动电机运转的同步性能,轻则损坏电机、磨损传动齿轮,重则损坏整个翻车机的驱动系统,因此对于翻车机多电机的同步性能要求极为严苛[3]。
传统的翻车机驱动系统中,采用的机械式的同步机械轴来强制保证多台电机的转速相同,这种刚性的、机械式的同步驱动方式在低速、低载荷时有一定作用[4-5],但是在高速、重载场合非但不能保证多台电机的同步性能,反而会引起驱动系统的振荡,从而加剧多电机驱动系统的复杂非线性扰动,影响翻车机驱动系统运行的稳定性。
1 翻车机驱动系统分析
翻车机的两套多台电机驱动装置设置在翻车机入口和出口双侧端环上,每套驱动装置通常需要功率为60~90kW之间的直流电机,每套驱动装置可以是一台电机,也可以是多台电机。多台电机通过减速器、制动器等一些列传动装置最终连接到驱动轴上。一些列传动装置都在一个共同的底座上固定[6]。翻车机驱动系统结构简图如图1所示。
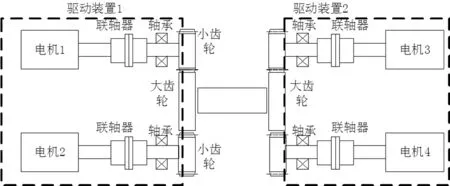
图1 翻车机驱动系统
普通的翻车机每套驱动装置使用一台直流电机驱动,这样直流电机的功率就会很高,高功率电机启动冲击大,而使用多台小功率电机共同驱动可以得到一台大功率电机的效果,而且有利于减小启动冲击,减小控制系统负担。本文拟使用两台电机来驱动一套翻车机的驱动装置,这样翻车机系统中总共有四台电机,针对这四台电机的同步控制方法进行研究。
2 翻车机直流电机控制模型
翻车机的驱动电机为直流电机,直流电机的简化模型如图2所示:

图2 直流电机模型
由比尔霍夫电压定律给出了直流电机的电压方程:

(1)
其中,为电枢反电动势,通常情况下电枢反电动势为:
(2)
电机电磁转矩为:

(3)
式中:为电机转矩因子;
由翻车机的电机负载特性能够得出电机平衡方程:
日前,在中国举行的NVIDIA GPU技术大会(GTC大会)上,英伟达公司全面阐述了其在自动驾驶领域的技术储备与发展构想。在自动驾驶与智能网联汽车大潮涌动的背景下,计算机技术将与汽车行业深度融合。今后的汽车将会是怎样的?我们的交通出行又会变成什么方式?英伟达公司汽车事业部高级总监Danny Shapiro先生表达了他对这些问题的看法。

(4)
将公式1~4进行拉普拉斯变换:

(5)
综上可以得出翻车机驱动系统直流电机的数学模型[7],由该模型可实现对直流电机的精确控制:

(6)
3 翻车机多轴电机同步控制策略
翻车机的多个电机的运动是相互关联和耦合的,因此如若不使用合适的多电机同步控制策略,无法实现高精度的多电机同步控制。本文使用等状态交叉耦合控制策略进行翻车机的多电机同步驱动控制,翻车机多电机等状态交叉耦合控制系统结构如图3所示。

图3 等状态交叉耦合同步控制结构
与常用的主从交叉耦合控制相比,等状态交叉耦合同步控制系统是将多个电机的反馈信号及其偏差共同反馈至各个电机的控制输入端,使得多电机同步控制系统具有更好的跟踪控制能力以及同步控制能力。而常用的主从交叉耦合控制系统是把上一台电机的运行状态反馈给下一台电机的控制输入端,将最后一台电机的运行状态反馈给第一台电机的控制输入端,因此只有整个多电机控制系统进入稳定运行状态后,才能够有较好的跟踪控制能力以及同步控制能力,系统的滞后性较为明显[8-9]。设定翻车机多电机同步控制系统中各个电机与设定值之间的跟踪误差为ei(t):

(7)
翻车机多电机同步控制系统中各个电机之间的同步误差为esi(t):
(8)
翻车机的多电机同步控制系统具有较强的非线性、时滞性以及惯性。工业中通常使用的PID控制器无法实现对翻车机多电机驱动系统的精确同步控制[10]。因此本文使用模糊PID控制算法对翻车机多电机驱动系统进行同步控制。模糊PID控制算法是在唱歌PID控制算法上发展而来的,其结合了模糊控制算法的优势,通过利用经验数据制定的模糊推理规则来实时调整PID控制器的比例、积分和微分控制参数。提高控制系统的鲁棒性能。 翻车机模糊PID控制器结构如图4所示。

图4 模糊PID控制系统原理
根据专家经验和经验数据制定翻车机模糊控制器的比例、积分和微分控制参数增量规则见表1~表3。
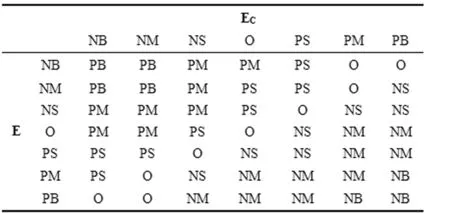
表1 比例增量模糊控制规则

表2 积分增量模糊控制规则
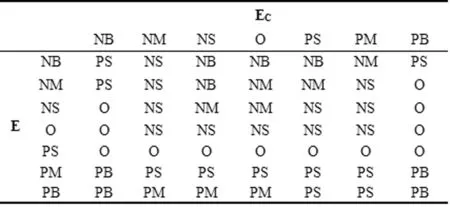
表3 微分增量模糊控制规则
本文在此使用精度较高的三角形隶属度函数来制定翻车机模糊控制器的比例、积分和微分控制参数增量规则[11]。分别设置反馈偏差和偏差变化率的基本论域为[-10,10]和[-5,5],比例、积分和微分控制参数增量的基本论域为[-3,3]、[-3,3]和[-0.6,0.6]。翻车机模糊控制器中PID控制器的输入参数为:

(9)
4 控制效果分析
通过实验验证本文研究的翻车机多轴电机同步运动控制系统的同步控制性能。实验过程中采用高精度旋转角位移编码器对多台电机的旋转速度进行采集并反馈至控制系统中,控制系统根据各台电机的运行状态实时调整控制策略,保证多台电机的高精度同步运行。对比本文研究的同步控制方法和常规同步控制方法性能,如图6所示。
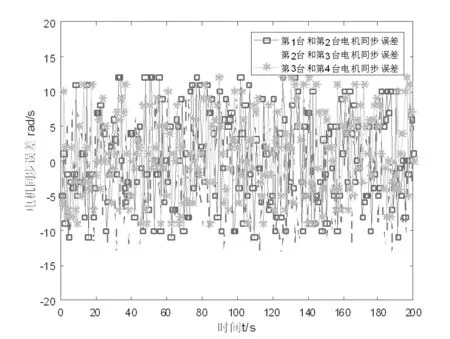
(a)常规同步控制系统中各台电机的同步误差

(b)本文研究的同步控制系统中各台电机的同步误差图5 同步控制性能对比
同步控制性能对比中可以看出,常规同步控制系统中各台电机的同步误差在[-12,13]rad/s范围内,本文研究的同步控制系统中各台电机的同步误差在[-7,8]rad/s范围内,相比常规控制方法性能提升了40%左右。
5 结论
本文研究一种基于交叉耦合策略和模糊PID算法的多电机同步控制系统,实现翻车机多台电机的同步控制。
常规同步控制系统中各台电机的同步误差在[-12,13]rad/s范围内,本文研究的同步控制系统中各台电机的同步误差在[-7,8]rad/s范围内,相比常规控制方法性能提升了40%左右。
本文研究的基于等状态交叉耦合和模糊PID算法结合的翻车机多轴电机同步运动控制系统能够有效提升翻车机多台电机运行的动态特性和稳定性,保证了翻车机驱动系统的正常运行。