灯浮标配套安装研究
2020-06-23唐承源刘健
唐承源 刘健

摘 要:灯浮标配套安装平台技术研究与应用是利用自行式叉车作为研发辅助工具,利用叉车运动、叉臂叉移及动力特性,在传统方法上进行科技创新研究,探索增加可回转、灯浮标配重安装尾管定芯、液压推动配重安装、拆卸,灯架则通过勾起并倾转、滚动、推进等动作,使人工装配过渡到机械半自动操作,从而在开展灯浮标陆地保养时,达到降低工人的劳动强度,提高施工作业的安全性,提高工作效率的目的。
关键词 :灯浮标;配重;灯架;装配;研究
灯浮标主要用来标示航道边界,指示浅滩,碍航物或表示专门用途的重要水上浮动助航标志,有良好的导助航应用效果。
1 灯浮标配套装配技术研究的背景
灯浮标在使用或堆放存储时,由于长期暴露在大气、海洋环境中,受到日晒雨淋,海浪冲击,海水侵蚀等环境和条件的影响和破坏,因而需要定期回收,在固定保养场所进行维修养护后重复使用。由于灯浮标体积大,重量较重,且数量众多,为提高灯浮标的养护质量,需要在保养的过程中对灯架和配重进行拆卸,保养完成后也需要重新装配待用。目前全国业内基本是采用传统的拆装方式:拆装灯架时通过叉车固定,航标养护工手动和叉车配合操作,费时费力;而一个灯浮标的配重一般由3-5个铸铁鼓圈组成,单个重量多为250-400KG不等,拆卸配重时,先松开鼓托片,叉车吊起自由落体或用叉车推动逐一拆下,安装时由叉车、人工,通过钢丝缆绳将一个一个配重圈吊起装配。方法传统简单,技术落后,劳动强度大,生产效率低,操作安全性差。因此迫切需要通过技术研究与应用,改变行业的技术落后面貌,进而通过科技创新引领生产力发展,在行业内形成良好的应用前景和推广价值。
2 灯浮标配套安装平台技术研究
为促进灯浮标安装技术的进步,有效降低劳动强度,提高装配的效率,促进灯浮标新技术研究应用,服务“交通强国”战略,北海航标处根据交通运输部南海航海保障中心科技项目研究计划安排,在2018-2019年,以10吨叉车作为研究创新技术平台,利用叉车原车所带的液压系统,增加遥控装置控制,通过液压装置的动作,在叉车的叉臂上增加左右平移、回转、配重定芯结构装置,推动配重进行装卸、灯架勾起并倾转等动作,来完成灯浮标的装配工作。在进行航标陆地保养时,通过创新技术的方法,实现灯浮标配重和灯架安装及拆卸的半自动化,从而极大降低工人的劳动强度,提高安全性和工作效率。
2.1 灯浮标安装平台配重的拆装
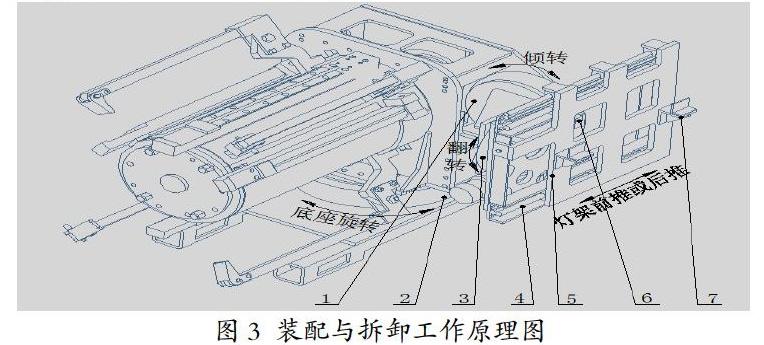
以下為配重的装配与拆卸工作原理图:
上图中:摆臂2的3个摆臂可以绕图中的8摆臂座作摆动,而摆臂的摆动是由安装在图中7外支撑筒内的三爪液压卡盘来控制,当三爪液压卡盘的3个卡爪往外撑开时,3个摆臂绕着摆臂座同时往外撑开。相反,当三爪液压卡盘的3个卡爪往内收缩时,3个摆臂绕着摆臂座同时向内收缩。配重的推进及拉出是由上图中的1端板、6配重推板及安装在7外支撑桶内的液压油缸、滑动总成、导向杆、拉杆来共同完成。液压油缸推动1端板往前推或往后退,端板通过4根拉杆带动滑动总成在8根导杆的导向作用下前推或后退,而4块配重推板就安装在滑动总成上,所以当油缸前推或后退时,配重推板跟着前推或后退。
安装或拆卸配重时,首先将10吨叉车叉臂叉入上图11底座总成中,主回转总成10将主回转以上的安装平台部分回转到上图位置,用遥控器控制上图中的2摆臂收缩,叉车将上图中的2摆臂及3配重上支撑杆套入事先摆放在配重存储架上的若干个配重内孔中,叉车叉起,利用叉车运动、上升、叉臂的左右移动等动作将摆臂2及配重支撑杆3套入灯浮标的尾管中,用遥控器操控制3个摆臂撑开顶紧,3个摆臂定位尾管中心与3个摆臂中心重合,此时,用遥控器控制液压油缸往前推,这样配重在4个配重推板的推动下被推入尾管中,此时通过收缩3个摆臂,叉车后退等配合就可以完成与尾管的分离,完成配重的装配作业。
拆卸配重与装配重刚好相反,先将摆臂2、配重支撑杆套入尾管中,控制3个摆臂撑开,使尾管中心与摆臂中心重合顶紧,将4个配重推板推到最前端,将图示5的4个钩板下摆并用插销固定成图示位置,通过控制液压油缸后退,使5个配重跟着配重推板后退到配重支撑杆上,将摆臂收缩,用叉车后退使平台与尾管分离,再将配重摆放在配重存储架上,完成配重的拆卸。
2.2 灯浮标安装平台灯架的拆装
上图中:1位液压倾转减速器,由液压马达驱动,可以将上图中的3、4、5、6、7整体倾转一定角度,微调整灯架4个安装角与灯浮标上的4个安装脚的角度,3也是液压翻转减速器,由液压马达驱动,用来调整灯架在长度方向与浮鼓鼓体摆放的角度一致。4为导向杆,5为推板,6为液压油缸,7为灯架卡勾,其共同的作用为将灯架推入浮鼓的4个安装脚或从浮鼓4个安装脚中拉出。
当安装灯架时,叉车将平台叉起,底座旋转将平台转到上图位置,叉车前行,使推板5与灯架的1个侧面贴合叉起,将灯架的4个安装脚送到浮鼓的4个安装脚位置,通过遥控器调整控制灯架的倾转、翻转角度及叉臂的高度,使灯架的4个安装脚与浮鼓上的4个安装脚高度、角度、倾转角度一致。此时,控制油缸6前行或后退,使灯架4个安装脚推入灯浮标的4个安装脚中,完成灯架的安装。
当拆卸灯架时,先将叉车移动到灯架前,通过调整倾转、翻转、主回转、叉臂高度及叉车的前后位置,使灯架卡勾7与灯架上方的1条角铁上升,托住灯架,松开灯架的固定螺丝,此时,控制油缸6前行或后退,使灯架4个安装脚脱离灯浮标的4个安装脚,完成灯架的拆卸工作。
2.3 灯浮标配套安装平台液压系统
当不使用安装平台时,从叉车液压油泵出来的液压油经①的P口进,从A口出,再经过1个做背压作用的单向阀后流入叉车的手动多路换向阀,这样设计可以保证叉车在接入安装平台液压油路后仍可以像没有接入前一样正常工作。
当使用安装平台时,只要③④⑤⑥⑦⑨中的任何1个电控液压阀的线圈有电,跟上述6个电控换向阀线圈并接在一起的①二位四通电液换向阀同时通电,使叉车的液压油从①电液换向阀的P口进,B口出,从而把叉车的液压系统切换到安装平台的液压系统中。当③④⑤⑥⑦⑨中没有控制电流(没有动作要求)时,①电液换向阀线圈也没有电流,叉车液压油又从①的P口进,A口出,流向叉车的手动多路换向阀。
2.4 灯浮标配套安装平台电控控制系统
灯浮标配套安装平台的电控控制系统主要是利用叉车上的直流24V电源,通过1个直流稳压模块后作为控制系统的电源,再利用吊车的遥控系统,将遥控系统控制输出的接触器更改为小型直流继电器模组,利用小型直流继电器模组控制电控液压阀即可。
3经济效益
灯浮标配重的装、卸。传统灯浮标配重的装卸要3到4人配合才能完成,纯手工操作,每次只能装配1个配重,效率低下,工作繁重。通过技术创新后,2个人可以轻松操作,1个是叉车司机,1个是手持遥控器的操作工,省时省力,而且是1次装卸5个配重,配重鼓圈按3个和5个的标准统一存放,存放和使用都更加科学和规范,装配的安全性和效率都有极大的提高。
灯浮标灯架的装、卸。传统灯浮标灯架的装卸需要3到4人配合才能完成,也是要纯手工操作,费时费力,效率低。通过技术创新应用后,2个人可以轻松操作,不用水平放置鼓體,工作更加便利舒适。
灯浮标配套安装平台技术创新研究与应用,改造和增加的设施装置成本约20万元,成本低。通过一段时间的使用,我们认为产品不仅不改变和影响叉车原有功用,而且安装和连接十分方便,技术可靠,操作简单,方便了灯浮标笨重、大件部件的安装操作,节约了人工费用开支,机械化的操作大大提高了灯浮标陆地安装的工作效率,生产安全更有保障,有向全行业推广应用的价值,经济效益和社会效益均十分显著。
4结束语
灯浮标配套安装平台整个设计采用三维Ug设计,设计后通过CAE受力分析结构强度并对设计进行改进。实践证明,设计思路十分高效。
灯浮标配套安装平台技术经初步应用后,实现了灯浮标配重和灯架安装及拆卸的半自动化,从而降低劳动强度,提高工作效率,达到了技术研究的预期要求,取得了较好的效果。
参考文献:
[1]张晓俊.叉车液压系统的设计及液压故障的诊断的研究[D].山东大学,2011.
[2]周士昌.液压系统设计图册[M].机械工业出版社,2003.
[3]黄宗益.工程起重机电子控制[J].上海同济大学,1994(10).
[4]苏欣平,刘士通.工程机械液压与液力传动[M].机械工业出版社,2010.
[5]路秋生. 直流稳压电源并联均流及实现[J].电子产品世界,2002(12b):71-73.
