磁吸式爬壁机器人设计研究
2020-06-21钟帅居士奇谢宇陈道硕李元龙
钟帅 居士奇 谢宇 陈道硕 李元龙


【摘 要】本文设计了一种磁吸式爬壁机器人为复杂环境下的检测提供一种解决方法,主要对爬壁机器人的轮子及原动件、电源部分、磁力吸附系统进行设计与校核。在此基础上,对爬壁机器人的控制结构的具体组成部分进行了设计,实现了爬壁机器人的无缆化运行。
【关键词】爬壁机器人;结构;控制;磁吸式
Abstract:In this paper,a magnetic wall-climbing robot is designed to provide a solution for detection in complex environments. It mainly designs and checks the wheels and original moving parts of the wall-climbing robot,the power supply part,and the magnetic adsorption system. On this basis,the specific components of the control structure of the wall-climbing robot are designed,and the cable-free operation of the wall-climbing robot is realized.
Key words:wall-climbing robot;structure;control;magnetic suction
前言
爬壁机器人(Wall-Climbing Robot)是一种可以在近乎垂直或完全垂直的墙壁、管道、玻璃、甚至是脚手架、防护网等面上完成相关作业的自动化或半自动化机器人,在国外称为极限作业机器人(Extreme Operating Robot)。
本文根据多数罐体,管道以及钢铁高墙等场景的实际,通过对磁吸式爬壁机器人的机械结构,控制结构,等方面研制出一款实用的小型四轮驱动爬壁机器人,用来解决客户对庞大的罐体,管道等检测的需求。
1 机器人的机械结构
1.1 轮子及原动件
要求最大载荷为20千克,一般的小型电机的额定扭矩都很小(一般30g重的电机额定扭矩为200g·cm)如果选用较大扭矩的电机,其占用空间会很大,甚至要比预计的爬壁机器人大小还要大,不符合占用體积小的要求。考虑到以上要求,采用小型直流无刷减速电机,此类电机的寿命较长,扭矩一般较大。考虑设计要求,一般的工业设计能选型则选型,无法选到则自行设计,最大载荷为20kg时,越障高度需要超过5mm,试选用车轮直径80mm,则所需输出扭矩为:
要想达到如此大的扭矩,还要限制电机的大小,一般的小型直流电机额定转矩为100g·cm~220g·cm,减速比超过100,由于停驻后要求自锁,因此用蜗轮蜗杆减速电机,其机械效率为40%~60%,则所需减速比为606~2000。
选用TTMOTOR厂家生产的电机(可定制),自带编码器,额定电压12V(编码器电压5V),工作额定电流1400mA,单电机型号TEC3650-1265,堵转力矩1083g·cm,电流5A,额定转速为5400r/min,额定功率为10.9W。单电机的参数如下图所示(厂家提供):
出于安全考虑,需要留出20%的余量,根据电机扭矩和功率设计一款减速器,减速比应为:
试选蜗轮齿数25,蜗杆头数为1,试选材料为HT200,根据齿面接触疲劳强度公式试算模数:
查表,取K=1.1,并将查得的强度、扭矩等数值代入,并查国标规范确认合适的值,得m=0.55,取m=6。
1.3 磁力吸附系统
作为爬行于金属壁面的爬壁机器人,磁力吸附系统是必不可少的,本机没有具体的前后设定,所以可将两组磁铁布置在机器人的前后两侧,永磁磁铁材料有很多,从传统的氧化铁到人造磁性物质铷磁铁(NdFeB),人造铷磁铁的磁性很强,并且铷铁硼(NdFeB)的最大磁能积、剩磁和内禀矫顽力参数的值越大,磁性就越好,选择铷磁铁N48其性能参数如下:
磁铁的布置如图所示:
则可负重约27kg,满足设计要求。
2 机器人的控制结构
爬壁机器人的控制系统并不复杂,要求爬壁机器人不仅能够传递各传感器的信号到控制器,还能驱动行走机构来移动机器人,考虑到成本以及开发时间,故选择Arduino开发环境进行控制系统的制作。
2.1 驱动系统供电设计
锂电池的输出电压为12v,Arduino开发板和制成的控制板工作电压有3.3V、5V、12V三种,因此需要分压降压电路来完成电压分配,一方面要驱动Arduino板正常工作,另一方面要驱动电机正常工作。选用L298N作为电机的驱动模块作为解决方案。其左右两端为A、B两组电机的输出脚,中间的输入脚(+12V)可以接入+6~+12V的直流电,GND为地线,+5V为输出,输出电流只有大约300mA,只能给单片机供电。逻辑引脚从左到右IN1,IN2,IN3,IN4。IN1、IN2是A组的逻辑输入,其余为B组的逻辑输入,逻辑输入的真值表如下:
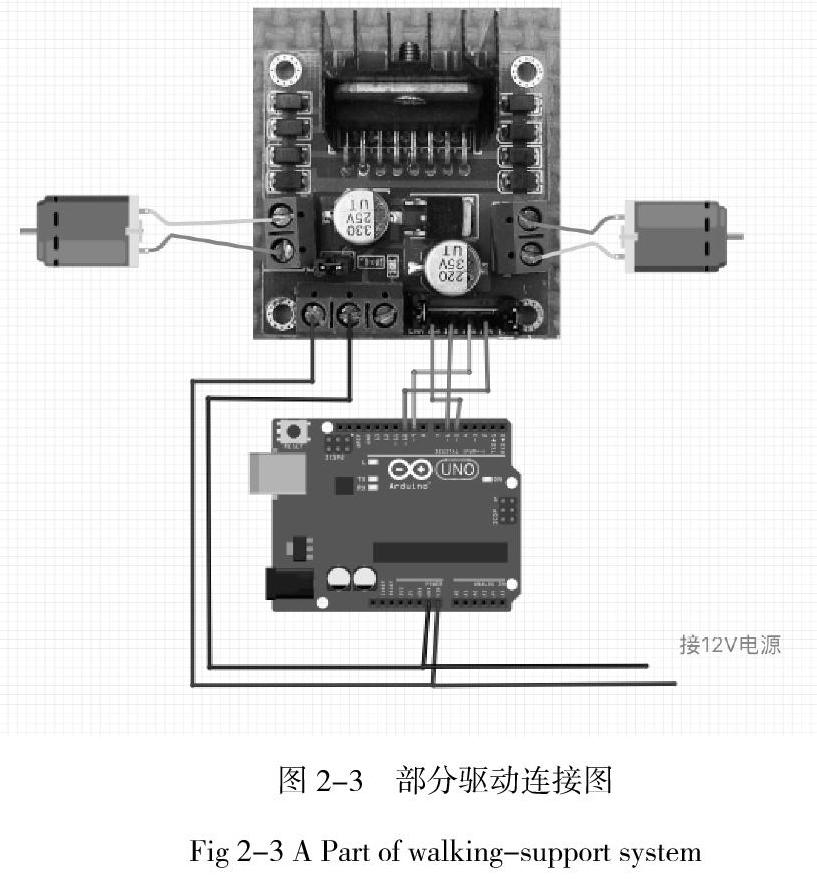
EnB组的真值表与EnA组相同。本设计中,电源与Ardunio、L298N、电机的连接示意图如下:
2.2 爬壁机器人的行走机构运动程序设计
部分驱动线路连接示意图如图2-3所示:
考虑到转弯动作以及正常行驶,停车等操作都是一侧方向的电机动作相同,故上图的两个电机为前轮或者后轮。因此控制板的信号只要输出一组PWM信号就能完成对两组驱动板的控制。驱动电路的电路图如图2-4所示:
机器人向前移动时,四个电机都是逆时针转动,根据上面提到的真值表,AB两组电机使能状态下,IN1,IN3低电平,IN2,IN4高电平会使电机进行转动然而开环控制的精度比较低,需要用到PID控制器来形成闭环控制,能实现闭环控制的关键元件就是电机自带的编码器。
电机自带编码器的作用是,测量电机的速度并依据速度输出频率变化的方波(占空比0~255,有符号,负号表示反转(逆时针))。
下表为电机旋转编码器引脚的功能(1、2号为电机电源引脚):
转弯系统:
由于该机器人并没有车辆一样的转向系统,因此该机器人转向时,可以采用履带式机械转向方法来转向,即左右两对轮转向相反。
2.3 无线蓝牙模块的使用
蓝牙模块上面裸露的铜板是天线,模块引出4个引脚:VCC,GND,TXD,RXD。VCC和GND是蓝牙模块电源输入的引脚以及接地脚,直接接到Arduino开发板上的5V输出和地线脚即可,TXD和RXD分别为发送端和接受端,应分别连接至Arduino的接收端RXD和发送端TXD上。如想控制蓝牙模块的使能,则可以将VCC脚接到Arduino某个数字脚,并且编写相应的开关程序即可。
3 总结
在本设计中,为了保持体积小巧的结构,我们采用了微型直流无刷电机做行走机构的动力部件,并且还使用了蓝牙控制器,PC蓝牙控制等方法,实现了该爬壁机器人的无缆化,并且还试验性地设计了一款自制的用于爬壁机器人行走的自动脚本,利用该脚本,能够完成一些重复性质高的任务。并且爬壁機器人自动化方面的创新仍然不会停止,因爬壁机器人便利的特性,其在消防、核电、救援、监视、检测、反恐等等方面的地位会越来越明显,高楼大厦,高墙罐体管道等等处处有他们的身影,在目标为工业4.0的今天,研究智能化自动化执行任务的爬壁机器人显得尤为重要,它将是在工业4.0中所扮演的一位重要的角色。
参考文献:
[1]A.NISHI. Development of Wall climbing Robots[J]. Computers Elect. Engng,1966,22(2):123-149.
[2]徐殿国,王卫,杨宏等. 日本壁面移动机器人技术发展概况[J] 机器人 1989 13(4):53-58
[3]Nishi A. Wall climbing robot using propulsive force of propeller[C]. Fifth Int. Conf. On Advanced Robotics-‘91/CAR,1991:320-325.
[4]Menon C,Murphy M,Sitter M. Gecko inspired surface climbing robots [C]. In:Proceedings of the IEEE International Conference on Robotics and Biomimetic,Shenyang,China,2004:431-436.
作者简介:
钟帅(2000.03.24--),男,汉族,江苏省扬州市高邮市人,本科学历,研究方向:机械电子;
居士奇(2000.07.12--),男,汉族,江苏省扬州市人,本科学历,研究方向:机械电子。
(作者单位:中国矿业大学机电工程学院)
