基于鲁棒伺服LQR的无人机横航向自动着陆控制律设计
2020-06-16王利国矫永康
王利国,矫永康
(1.中航物资装备有限公司,北京100027;2.海军航空大学,山东烟台264001)
无人机高等级自动着陆控制系统是解决进近着陆阶段由于地面站人为操作不当而引起飞行事故的最有效方法,其核心之一是设计自动着陆控制律[1]。在着陆期间,无人机必须精确跟踪期望的着陆轨迹,以使飞机安全、可靠地降落到期望着陆点[2];另外,着陆期间的不确定因素,包括风扰动和传感器测量噪声等,严重影响控制精度和飞行安全。因此,着陆轨迹精确控制技术的难点在于如何在外部风扰动及传感器信号误差存在的情况下仍能够保持足够的控制精度。
现有的解决办法多是在经典控制架构基础上,应用鲁棒H∞控制技术、模糊控制技术和神经网络技术设计轨迹跟踪控制律,取得了一定的应用成果[3-4],但是这些方法的工程应用前景尚不明确。
应用多变量控制理论鲁棒伺服LQR(RSLQR,Robust Servo Linear Quadratic Regulator)设计现代航空飞行器控制律,是波音公司、霍尼韦尔公司、原麦道公司的重要手段和方法[5-7]。该方法兼顾了多个控制目标的控制品质和鲁棒特性,在解决现代飞行器多通道耦合、多目标优化等方面,具有较强的优势[8]。RSLQR方法[9-11]是在LQR 状态反馈框架的基础上,将积分环节引入到控制律的前向回路,增强了控制器对外部扰动和不确定性的适应能力,且具备无静差指令跟踪能力,能够满足自动着陆系统对着陆轨迹跟踪精度和抗扰动能力的需求[12-14]。
为此,本文从工程应用出发,以提高高附加值无人机高等级自动着陆控制系统的抗干扰能力为目的,研究基于RSLQR的横侧向轨迹跟踪控制律设计。基于RSLQR方法,设计滚转姿态保持模态控制律,以此作为控制内回路,分别进行航向保持/预选模态和LOC截获与跟踪模态控制律设计。最后,通过单模态数字仿真、RSS分析和蒙特卡洛仿真[15-16],对基于RSLQR的横侧向轨迹跟踪控制律进行验证,为工程应用奠定基础。
1 横侧向自动着陆过程描述
在有人机精密进近着陆系统的发展中,主要经历了仪表着陆系统(Instrument Landing System,ILS)、微波着陆系统(Microwave Landing System,MLS)和全球卫星导航自动着陆系统(GBAS Landing System,GLS)等几个典型阶段[1],其中,现阶段应用最为广泛的是ILS。为了共用机场、跑道等条件,本文以ILS 为对象进行横侧向自动着陆控制律的研究。
ILS自动进场着陆的横侧向控制过程包括LOC波束的截获过程和波束跟踪过程。利用航向预选控制模态(通常为45°)把飞机控制到相对于跑道航向的某一角度上,飞机即以这一截获角飞向跑道中心线。
如图1所示,当LOC接收机给出的波束偏差信号小于给定值时(一般为2°左右波束偏差μ),LOC 截获,进入LOC截获与跟踪控制,断开航向预选信号,在航向和波束偏差信号的控制下,无人机将进入并稳定在跑道中心线和跑道航向上。
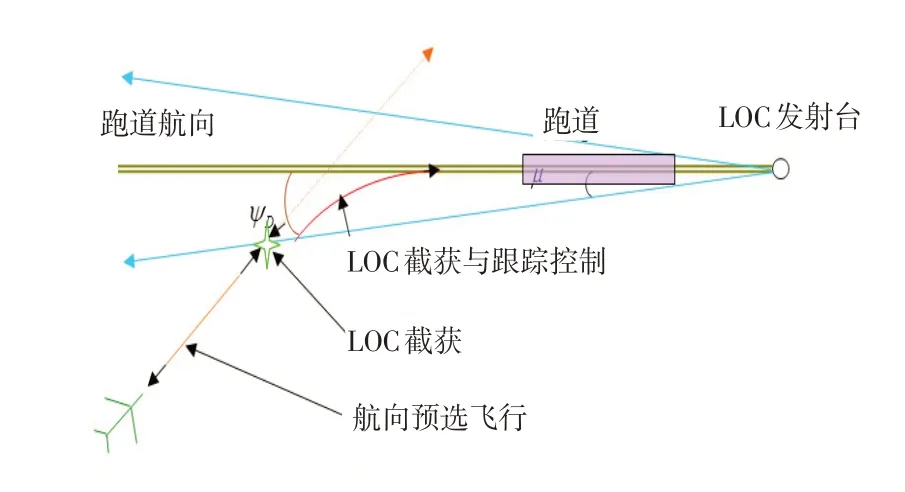
图1 LOC截获控制示意图Fig.1 Sketch of LOC interception control
2 自动着陆控制律设计
根据ILS 横侧向自动着陆过程的描述,横航向轨迹跟踪控制律的主要任务有2 个:航向保持/预选和LOC截获与跟踪。首先设计基于RSLQR控制技术的滚转姿态保持控制律,作为航向保持/预选和LOC 截获与跟踪模态控制律的内回路。
2.1 滚转姿态控制模态设计
滚转姿态保持控制律采用RSLQR[10]方法进行设计,其基本控制结构如图2所示。
考虑如下基于状态空间描述的飞机横航向控制系统:


图2 RSLQR控制结构Fig.2 Control structure of RSLQR
采用RSLQR控制方法,其控制指令可以写为:

式(2)中,KI、Kx为传递系数。
RSLQR 方法是在传统LQR 方法的基础上,将跟踪误差指令的积分作为一个状态量进行反馈,使得误差信号趋向于0,其具有响应快速、鲁棒性强、无静差指令跟踪的优点,在国内外的导弹和无人机型号上已经取得了成功的应用。图3 为详细的基于RSLQR 的滚转角控制框图。
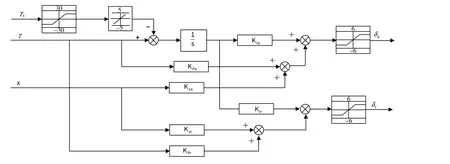
图3 基于RSLQR的滚转角控制框图Fig.3 Block diagram of roll angle control based on RSLQR
2.2 横航向轨迹精确跟踪控制律设计
根据图1的LOC截获控制示意图可知,在横航向截获前均是采用航向预选模态(通常为45°)把无人机控制到相对于跑道航向的某一角度上,无人机即以这一截获角飞向跑道中心线,在这个过程中,针对ILS着陆方式,以航向角和LOC信标台测得的航向波束偏差信号为主要反馈,控制无人机完成航向道的截获、跟踪并在预定航向道上稳定飞行。为此,以精确的滚转角控制为内回路,设计如图4、5所示的航向保持/预选和LOC截获与跟踪模态控制律,实现高等级自动着陆时横航向轨迹的精确跟踪。其中:Ψ 为航向角,Ψc为预选航向,LOC偏差的单位为(°)。

图4 航向保持/预选模态控制框图Fig.4 Block diagram of course keeping/pre-selected mode
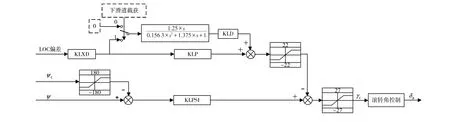
图5 LOC截获与跟踪模态控制框图Fig.5 Block diagram of LOC interception and tracking mode control
2.3 横航向轨迹精确跟踪控制律性能评估
对横航向自动着陆性能要求和有效性要求如下:
性能要求为接地时起落架离跑道中心线的距离超过21 m 的概率小于10-6;侧滑角过大的概率小于10-6。有效性要求为无人机低于500 ft 进场,成功着陆的概率至少95%。
另外,文献[17]对自动着陆的接地指标进行了说明。理想着陆需满足的接地要求:横向接地位置距跑道中心线的距离小于±8 m;接地处滚转角小于±1°;接地处偏航角小于±5°。可接受着陆需满足的接地要求:横向接地位置距跑道中心线的距离小于±21 m;接地处滚转角小于±2°;接地处偏航角小于±10°。
传感器误差、风干扰等不确定性因素会严重影响无人机自动着陆的精度。为此,采用RSS[18-19](Root Sum Square)结合蒙特卡洛仿真方法[17]对设计的自动着陆控制系统进行鲁棒性评价。RSS 能够反映所有模型误差的影响,对于各种模型误差的影响可以进行比对分析,获得最显著影响误差,从而对自动着陆控制系统优化设计指明方向。通过RSS 方法分析影响自动着陆控制系统性能的主要因素,并对这些因素进行各种边界组合,这样就可以采用标称情况+主要因素+边界组合的方法,能够较为充分地验证自动着陆系统的性能边界。
3 数字仿真与分析
以某无人机高度H=100 m,速度v=70 m/s 的着陆状态点为例,用以研究基于RSLQR 的横侧向自动着陆控制律的鲁棒性和动态特性等控制性能。
3.1 仿真参数设计

3.2 单模态仿真分析
根据3.1的控制参数、无人机模型和舵机模型,不考虑传感器精度的情况下,在5 m/s 侧风下对横航向自动着陆控制律进行仿真,仿真持续至无人机接地时刻,并与采用常规LQR控制方法的自动着陆控制律进行对比,对比结果如图6所示。
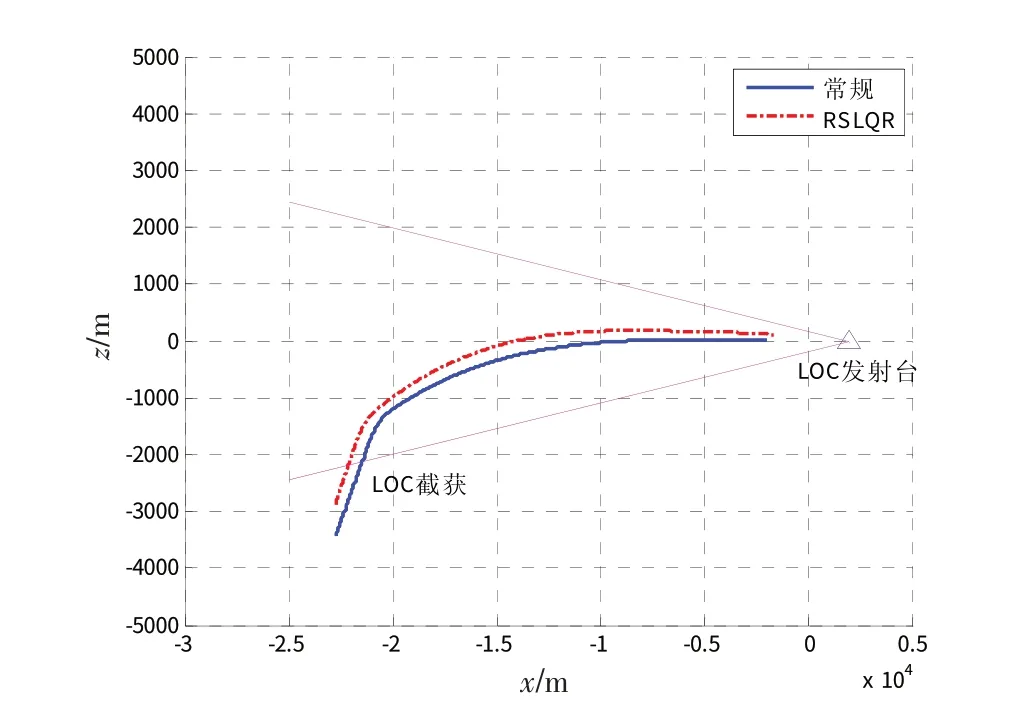
图6 横航向自动着陆控制轨迹仿真曲线Fig.6 Trajectory simulation curve of lateral-directional automatic landing control
从图6中可以看出,基于RSLQR的横航向自动着陆控制对侧风的抑制能力优于常规LQR 控制方法。基于RSLQR方法的着陆过程仿真曲线如图7所示,从图中可以看出,整个着陆过程中,侧滑角小于1.5°,滚转角速率小于4(°)/s;接地时刻,无人机横向接地位置距跑道中心线的距离小于8 m ;接地处滚转角小于1°;接地处偏航角小于5°,符合自动着陆性能要求和接地指标要求。
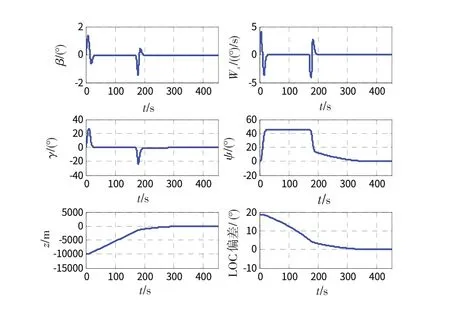
图7 基于RSLQR的横航向自动着陆控制仿真曲线Fig.7 Simulation curve of lateral-directional automatic landing control based on RSLQR
3.3 自动着陆控制律鲁棒性分析
根据3.1的控制参数、无人机模型和舵机模型,考虑传感器精度及15 m/s 以内的侧风情况,对横航向自动着陆控制律进行RSS分析和蒙特卡洛仿真。
RSS分析结果见图8。由图8可知,影响横向接地位置的主要因素是LOC 偏差信号精度、侧风干扰、航向角和滚转角偏差,将这4种因素进行排列组合,得到16 种误差边界,结合表1 中的误差源信息,进行1 000次蒙特卡洛仿真,结果见图9、10。由图9、10 可知,基于RSLQR 的自动着陆控制律在接地时的滚转角、偏航角和侧向距离方面要优于基于常规控制的自动着陆控制律,说明了基于RSLQR 的自动着陆控制律在鲁棒性方面的优势。

表1 鲁棒性分析中误差源信息Tab.1 Information of error source in robustness analysis
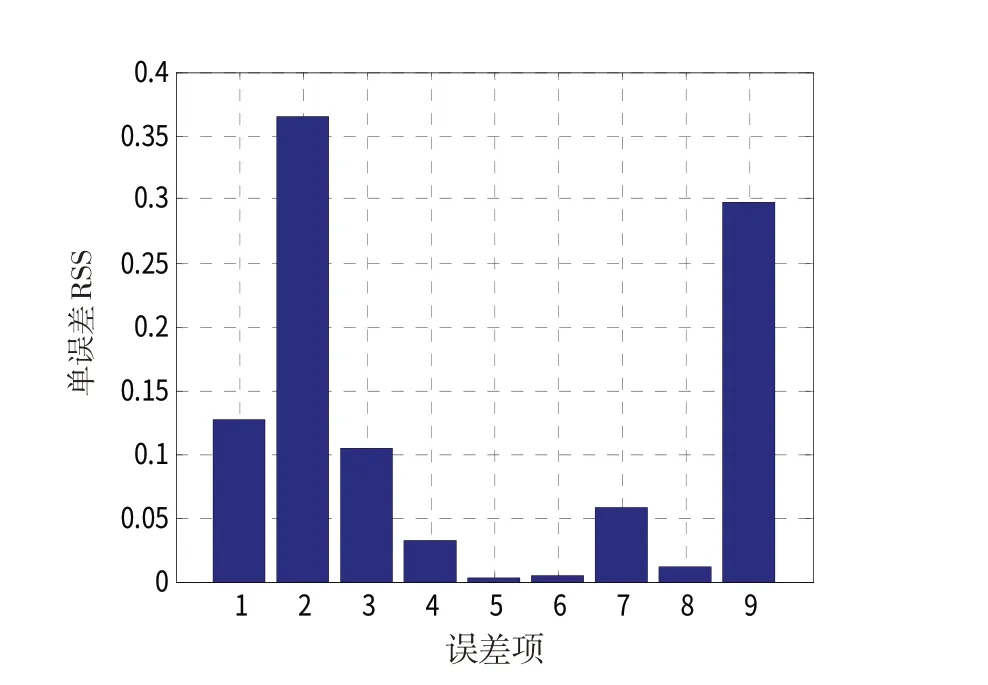
图8 影响横向接地位置的RSS分析结果Fig.8 RSS analysis results that affect the horizontal grounding position

图9 基于RSLQR的自动着陆系统蒙特卡洛打靶结果Fig.9 Monte Carlo shooting results of automatic landing system based on RSLQR

图10 基于常规控制的自动着陆系统蒙特卡洛打靶结果Fig.10 Monte Carlo shooting results of automatic landing system based on conventional control
4 结论
本文从工程应用出发,研究了一种无人机高等级横航向自动着陆鲁棒控制方法。基于RSLQR方法设计滚转姿态控制内回路,达到鲁棒性强、跟踪精度高的目标;在此基础上,设计航向保持/预选模态和LOC截获与跟踪模态,实现横航向轨迹的稳定跟踪。最后,以某无人机为对象进行了单模态仿真、RSS 分析和蒙特卡洛仿真。结果表明,所设计的自动着陆控制律能够满足高等级自动着陆控制的需求,且具有较强的鲁棒性。
