调频连续波毫米波雷达信号处理软件分析
2020-06-16翟龙军
高 山,但 波,刘 克,翟龙军
(海军航空大学,山东烟台264001)
雷达按照信号形式可以划分为脉冲雷达与连续波雷达,脉冲雷达适用于多目标的信息测量[1],但由于收发一体的技术特点致使单基地脉冲雷达无法同时进行收、发信号,因而产生了距离盲区。但连续波雷达则与之相反,不存在距离盲区。同时,随着技术的发展,连续波雷达多目标检测、收发隔离等问题都有所改善,连续波雷达的优势逐渐凸显,并受到极大的关注。连续波雷达的结构相对简单,信号的峰值功率不大,采用微波器件和固态源可以有效地减小雷达体积与重量[2];调制信号多样化,通过调频或者调相等扩频技术的发射信号具有抗侦察与抗对抗的能力,更好地对敌方进行隐身[3]。在导弹近程制导的应用方面,连续波雷达功率低、调制信号多样化而且测量精度高[4],十分符合末制导雷达的需求。集成电路、微波技术的发展也为连续波雷达应用于末端制导提供了可能。
连续波雷达最早得到应用,是1924年英国利用调频连续波雷达测量电离层高度[5];20 世纪50 年代中期,功率仅为几十毫瓦的微波固态源代替作为信号源代替了电真空器件,连续波多普勒导航系列雷达的跟踪控制器应用了微处理机技术,该雷达与其他雷达相比,不仅效能得到了提升,而且抑制杂波干扰与电子侦察的能力也得到了增强;20世纪90年代以后我国对于连续波雷达的研究也逐渐增多,并取得了一系列研究成果,沈福民、贾永康教授对相位测距中的解模糊技术提出新看法,沈福民教授主导研制了多频连续波雷达等[6]。
本文通过研究DemoRad雷达信号处理软件,分析了连续波雷达的工作原理和信号处理过程,并进一步研讨调频连续波毫米波雷达用于近程制导的可行性。首先,介绍了研究背景与意义;接着,给出了DemoRad雷达的硬件与DemoRad雷达信号处理软件,并对软件各模式功能进行实验测试;最后,介绍调频连续波毫米波雷达的性能特点,对其应用于末端制导的缺陷给出改善方案。
1 测量平台
1.1 平台硬件
本文使用的A24BF 是ADI 公司新型的雷达产品。它是一个具有2 组发射天线、4 组接收天线、1 个可编程Blackfin 数字信号处理器的24GHzMIMO 雷达,包括射频天线和全射频信号电路、ADF5904(接收)、ADF5901(发射)、ADF4159(PLL)、ADAR7251(AFE)和ADI 的ADSP-BF707 DSP。DemoRad 系统框图如图1所示。由图1可知,一个Blackfin数字信号处理器是用来控制射频前端处理接收通道的雷达测量信号。根据框图ADF5901 双通道发射机与频率合成器ADF4159相结合,产生FMCW发射信号。2组天线由ADF4159 发射机馈电,前端的接收路径由ADF5904 四通道接收机实现采用ADAR7251 模拟前端对接收机的测量信号进行放大和采样。然后,在DSP中对信号进行处理,通过USB 2.0或CAN接口对处理结果进行访问。包括电源在内的整个电路板设计在一个总尺寸为100 mm×100 mm 的PCB上。
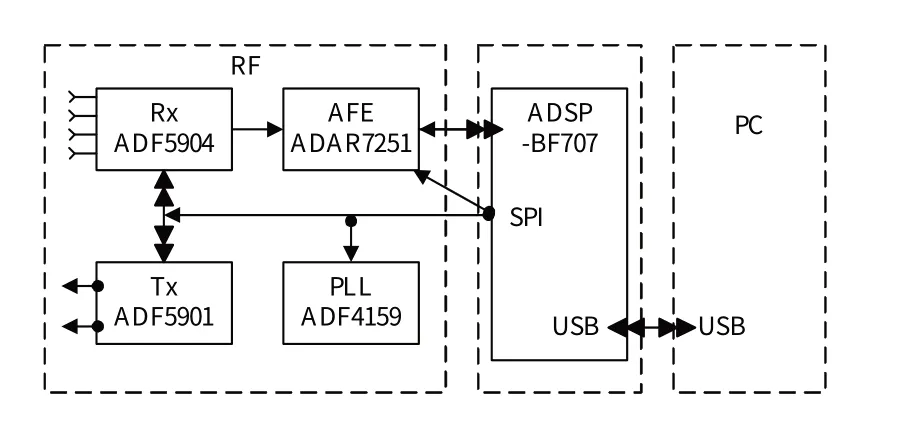
图1 DemoRad系统框图Fig.1 System chart of DemoRad
1.2 平台软件
信号处理软件的整体设计思路及系统结构如图2所示,用户选择不同的模式,并在选择模式下进行操作;进行实时数据采集并处理时选择“参数载入”将参数载入到DemoRad 雷达平台中,DemoRad 开始工作并通过USB2.0 或CAN 接口向上位机发送数据;用户可以点击“数据保存”将实时测试数据进行保存;也可以点击“数据载入”将数据库中数据载入到上位机;通过“在线”或“离线”数据载入到上位机后,点击“开始”对数据进行处理,并在用户界面上绘制相应图像,并显示参数。

图2 信号处理软件的整体设计思路及系统结构Fig.2 Design idea and system structure of signal processing software
2 信号处理软件功能实现及实验验证
2.1 FMCW模式验证
对于FMCW模式的准确性进行实验验证,在雷达正前方1 m 处放置一静止目标,实物场景图如图3 所示
图4 为上位机接收的雷达采样信号,对其进行傅里叶变换,采样信号频谱如图5所示。

图3 实物场景图Fig.3 Entity scene graph
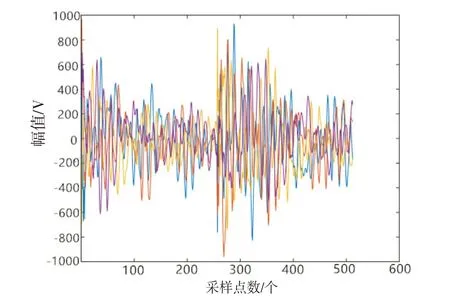
图4 雷达采样信号Fig.4 Radar sampling signal

图5 采样信号频谱Fig.5 Sampling signal frequency spectrum



图6 距离剖面图Fig.6 Range profile
2.2 Range-Doppler模式验证
本节通过2个实验的测试、分析结果,判断其性能与测量精度。
将雷达面对道路,在雷达前方13 m、21 m 和23 m位置处有静止目标,同时观测16~18 m 处道路上的汽车。当汽车路过时记录此时数据,获得的距离剖面图与距离-多普勒图,如图7所示。由图7可以看出,在17 m 左右位置有一动目标,其速度为2 m/s。可以看出雷达可以显示不同速度的目标。
由于观测位置相同,静止目标位置不变,观测到路边距离雷达15 m 位置处有2 名路人,其中1 名静止不动,1名以0.5 m/s 的速度运动,当2人处于相同位置时记录得到数据,如图8 a)、b)所示。


图7 距离剖面图及距离-多普勒图Fig.7 Range profile and range-doppler profile
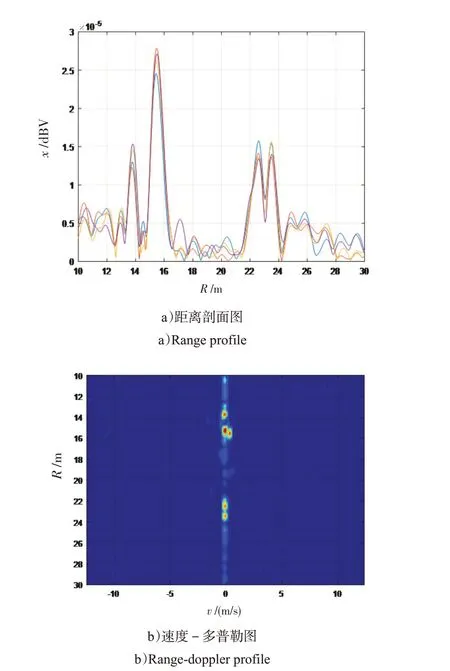
图8 距离剖面图及速度-多普勒图Fig.8 Range profile and range-doppler profile
图8中,15 m 位置处有2个目标。一个速度为0,另一个为0.5 m/s,验证了雷达进行距离-多普勒处理可以将相同位置处的不同速度的目标进行区分。
2.3 DBF模式验证
在DBF模式中,目标距离信息的测定方式与FMCW模式相同,本节不再进行分析。
在雷达左前方1 m、30°放置一静止目标,实物场景图如图9所示。
对雷达回传数据进行处理,得到其距离维信息,距离剖面图如图10所示。

图9 实物场景图Fig.9 Entity scene graph

图10 距离剖面图Fig.10 Range profile
从图10 看出目标所在位置,选取目标所在距离维,对该距离维信息进行傅里叶变换,将包含目标角度信息转移到频谱,并解算出角度,得到目标距离维下的方位剖面图以及距离方位图,如图11 a)、b)所示。
为了进一步测定DBF模式下的雷达测量精度,在雷达前方不同方位放置2 个相同静止目标,其实物图与距离-方位显示如图12 a)、b)所示。

图11 方位剖面图与距离方位图Fig.11 Azimuth profile and range azimuth profile

图12 实物场景图与测试结果Fig.12 Entity scene graph and test result
2.4 MIMO技术仿真及其性能分析
DBF模式是对目标的距离、角度信息进行提取分析,但是DemoRad雷达平台仅有2组发射天线、4组接收天线,其角度分辨力很低,为了增加雷达的角度分辨力,雷达采用了MIMO 技术,增加了雷达孔径增强了雷达测角精度。
DemoRad雷达平台,具有2组发射天线、4组接收天线,采用了稀疏发射紧密接收的天线布阵方式。dT=3dR、dR=λ/2,其中:dT为发射天线间距;dR为接收天线间距。通过多输入多输出技术可以得到Ne=7组模拟接收单元,Ne为等效阵的阵元素。
1)在雷达偏左55° 前方1.5 m ,放置1 个静止目标,对接收数据进行处理。采用与不采用MIMO技术得到的结果如图13 所示。可以看出在采用多输入多输出技术后检测到的目标精度更高,目标更精确。

图13 MIMO技术对雷达精度影响Fig.13 Influence of MIMO on radar accuracy
2)为了进一步测试多输入多输出技术对雷达分辨力的影响,在雷达左、右一定角度1 m 位置放置2个完全相同的静止物体,实验结果见图14。图14的实验结果可以看出,采用了多输入多输出技术后雷达的角分辨力大幅提高,有效地提升了雷达性能[8]。

图14 MIMO技术对雷达精度影响Fig.14 Influence of MIMO on radar accuracy
2.5 Target-Detection模式实现
Target-Detection模式提取到了目标的距离、方位、速度信息,将256个采样周期的数据作为一组数据,对每个采样周期的数据做数字波束形成和距离多普勒处理,通过门限检测检测到目标,计算其数量与能量中心,确定目标的距离、方位二维分辨单元,对同一目标的距离与方位二维分辨单元的256 个采样周期做FFT变换,取得目标速度。
3 调频连续波毫米波雷达末端制导可行性
3.1 调频连续波毫米波体制雷达优势与缺陷
调频连续波毫米波体制雷达的优势:
1)由于发射信号为连续波,消除了脉冲体制所面临的距离盲区问题[9]。
2)连续波体制的工作电压低,发射峰值功率低,信号源制作简单,同时不易被敌方侦察到,具有很好的隐身性能。
3)调频连续波雷达具有超大的时带积信号,相比于其他体制雷达在相同信号强度以及信号带宽的情况下信号能量较大,检测目标能力较强[10];
4)调频连续波雷达结构简单,随着微波技术、集成元件和固态源等技术的发展,连续波雷达尺寸更小、体积更加轻便、成本也相对较小;
5)毫米波体制同时具有微波体制和红外体制的优点[11],毫米波系统易于集成化、精度高、抗干扰性能强同时具有较强的全天候工作能力。
调频连续波毫米波体制雷达的缺陷:
1)收发隔离问题。收发隔离问题是连续波雷达一直须要解决的问题。采用收发共用天线,会存在收发耦合问题,因此,为了减小收发耦合,一般不采用收发共用天线[12]。但如果采用收发分置天线,由于导引头内部空间小、收发天线间距小,会有发射信号直接通过接收天线进入接收机,所以收发隔离问题是主要限制连续波体制雷达应用于末端制导的问题;
2)动目标距离-速度耦合问题。由线性调频连续波雷达信号可以推出线性调频连续波雷达的模糊函数[13]为:

由式(1)可以看出线性调频连续波的模糊函数是在τ-v 平面上斜率为μ 的正比例函数,即:

式(2)将引起动目标的距离-速度耦合问题,即由于线性调频连续波雷达得到的目标多普勒频移存在模糊,而引起的测距误差[14]。
3.2 连续波雷达改善措施
3.2.1 收发隔离问题改善措施
利用隔离元件进行收发隔离主要是指在收发共用天线上利用环形器、耦合器对发射与接收信号进行物理隔离,发射信号与接收信号互不干扰,达到隔离的效果,但在实际应用中这种方法的隔离度并不高。
空间隔离,主要是在收发天线间距较大的情况下有所应用[15],在天线间放置吸波材料或者屏蔽物,同时改善天线的波束指向,但是这种方法较为局限,在天线间距较近时不适用。对消技术主要是利用人为产生的信号来与泄露信号进行抵消来达到隔离的效果,按照对消信号的类型分为中频对消、射频对消。
DBF 技术,在对发射波束进行幅度加权,降低发射波束在直达接收波束方向的天线增益,同时在接收波束上也应用DBF技术,降低接收波束在发射天线方向的天线增益,来达到收发隔离的效果[16]。
3.2.2 速度距离耦合问题改善措施
多普勒测距误差矫正可采用三角波波形测定上下变频信号,利用上下变频信号进行测距误差矫正[17],这就要判断上变频与下变频信号频谱是否来自同一目标,将同一目标的上下变频频谱进行配对。虽理论上同一目标的上下变频信号应具有一样的形状和幅度,但是由于干扰、目标起伏特性等问题的存在,两者会出现差异,所以只能通过一些频谱特性进行配对。目前应用最为广泛的方法是频谱面积法和最小均方误差法。
频谱面积法是利用频谱的面积大小作为判断频谱是否来自同一目标的标准,将频谱面积相差最小的视为同一目标的上下变频信号进行配对。
最小均方误差法是对以一目标的上变频信号为准,对各下变频信号求出均方误差,找到最小值即为同一目标的上下变频信号[18]。
4 结束语
首先,介绍了DemoRad 雷达平台,对其进行了简要概述;接着,对信号处理软件框架进行介绍,并对各模式进行分析测试,验证其功能是否可以实现并检测其精度;最后,对连续波毫米波雷达是否可以在末端制导上应用进行分析,分析了连续波和毫米波体制的优势。同时,分析出应用于导引头上存在的问题,对其主要问题提出改善措施。研究发现软件设计中也存在一些缺陷,如在对部分模式信号处理进行编程时所采用的算法效率较差,致使在软件运行时信号处理的实时性很差;软件在进行多目标信息提取时会报错导致软件崩溃;软件只能对雷达平台某些参数进行修改限制过大等问题。这些问题会在今后逐渐完善。
