基于北斗系统的交通环境现实增强头盔系统设计*
2020-06-12杨岱宗郭梦瑶
梁 星,杨岱宗,郭梦瑶
(福建农林大学,福建 福州 350002)
1 概述
提高道路使用者安全性的智能设备是交通领域中最重要的课题之一,在过去的十年中引起了很多关注。车辆检测是一个非常具有挑战性的任务,由于车辆外观的高度可变性,其形状、颜色和大小可能有所不同,其外观多样性丰富,附近物体和照明条件的影响很大。车辆检测系统在交通行业有很多应用,如排队,前/后避撞和减轻,交通检测等。强大而准确的车辆检测是所有这些系统的关键步骤。而车辆检测在国内外最常用的方法已通过使用有源传感器,例如基于声学、雷达和激光的相关传感器。在过去的十年里,科研人员在交通环境系统的计算机视觉领域展开了大量的分析,已经提出的许多算法和方法中都具有最终的共同目标:给驾驶者提供最完善的图像处理措施以解释视觉信息。在本论述中,研发了应用于交通环境评估的现实增强头盔。
2 项目规划
2.1 硬件系统
拟定的交通环境现实增强包括两个相机:摄像头一个前视,一个后视。因此,传感器范围覆盖了主车辆的局部环境,除了侧盲区之外,能够实现近360°的视场。一个共同的硬件触发器同步两个摄像头的图像采集,并且一个机载嵌入式系统包含计算机视觉算法。
系统的体系结构层概念上是相同的:车道检测、道路交通标志识别、车辆识别和跟踪、车辆导航、超车提醒。每个视觉系统的第一步都是减少图像平面中的搜索空间,目的是提高车辆监测模块的性能[1]。故检测道路车道标记并将其用作驱动车辆搜索过程的指导。扫描车道边界所包含的区域,以便找到传递给车辆识别模块的候选车辆。在没有检测到车道标记的情况下,使用感兴趣的基本区域代替覆盖车辆的前部,后部和侧部[2]。最后,利用卡尔曼滤波技术从而实现跟踪的阶段。
2.2 软件系统
2.2.1 车道检测算法
使用梯度信息结合局部阈值方法来检测车道标记,所述局部阈值方法适应于投影车道标记的宽度[3]。然后,回旋曲线拟合检测到的标记。该算法在候选搜索区域从相机位置前方2 m处到最大范围扫描多达25行,以便找到车道标记测量值。所提出的方法实现了非均匀间距搜索,从而降低了拟合曲线中的某些不稳定性[4]。最终的状态向量由六个变量组成在道路上的每个车道。

然后使用卡尔曼滤波器基于车道标记测量估算每个车道的回旋曲线[5]。
除检测到的道路车道之外,还考虑附加虚拟车道,以便处理车辆位于两个车道之间的情况(如果正在执行车道变换操纵)。虚拟车道在车道之间提供了必要的重叠,避免由于两辆车被分别检测为两辆潜在车辆而造成的误检和双重检测[5]。虚拟车道在两条相邻车道之间提供重叠。图1提供了两幅在PC机上处理后真实室外场景中车道标记检测的例子。检测到的车道决定车辆搜索区域并帮助减少误报检测,在系统未检测到车道标记的情况下假设固定车道。
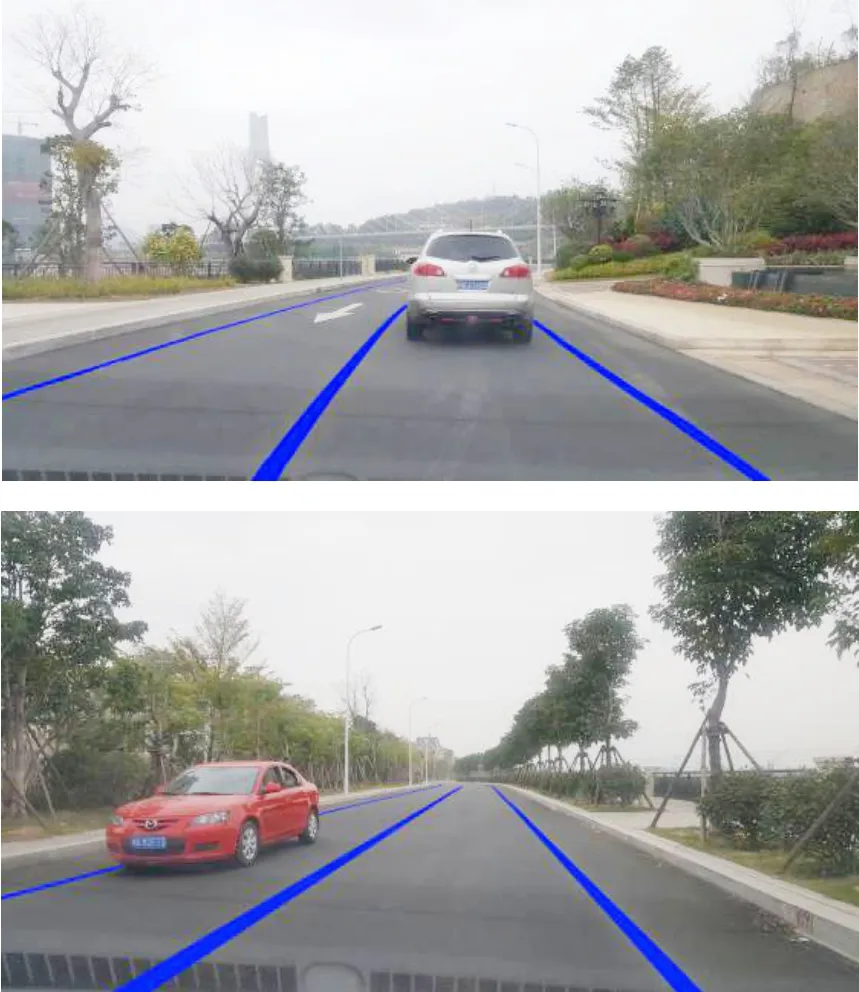
图1 车道检测试验结果
2.2.2 交通标志识别算法
本论述提出了一种基于HOG特征训练串联分类器算法通过最优匹配的识别算法。我国的交通标志大多为规则的几何形状,具有对称性。那么可以利用检测到的候选物是否具有对称性做检测后的筛选条件。当交通标志未出现时,图像呈现出来的大多是树木、护栏、地面、天空等不具有对称性的物体,当交通标志出现在图像时,交通标志的规则性具有较好的对称性[6]。所以,利用三维平面变换后筛选串联分类器检测到的候选物具有理论依据和可行性。以上所描述的流程如图2所示。
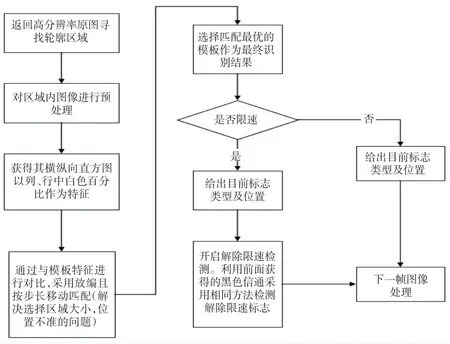
图2 标志识别流程图
2.2.3 车辆识别和跟踪算法
前视和后视车辆检测系统共享相同的算法核心。关注机制从底部到最大范围依次扫描每条公路车道,寻找可能代表潜在车辆的一组特征。首先,通过顶帽变换来搜索车辆接触点。这个算子允许在非一致的背景上检测对比物体。有两种不同类型的礼帽转换:白帽子和黑帽子。白帽子变换被定义为原始图像与其开放之间的残差。黑帽变换被定义为闭合和原始图像之间的残差。白帽和黑帽的转换分析如下。

在实验例子中,使用白帽算子,因为它增强了车辆和道路之间的边界。如果白色礼帽特征的数量大于可配置阈值,则预选水平接触点。然后,如果Canny点的熵对于通过透视约束和目标对象的先验知识定义的区域足够高,则预选候选者选择过程如图3所示。
在测算Canny特征之前,运用自适应阈值的方法。这过程是利用逐渐增加图象对比度的迭代算法,并且将在对比度增加的图像中获得的Canny点的数量与当前图像中获得的边缘的数量进行比较。如果实际图像中Canny特征的数量高于对比度增加的图像,算法将停止。否则,对比度逐渐提高,过程恢复。这种自适应阈值方法允许获得鲁棒的图像边缘。
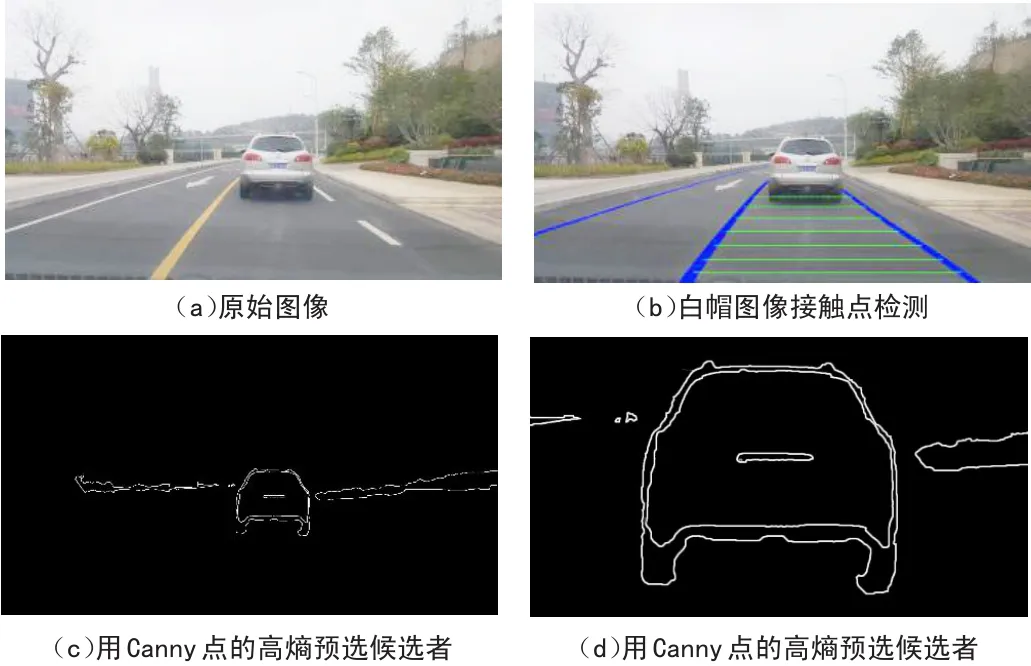
图3 预选候选者选择过程
对称轴被线性组合以获得候选者的最终位置。最后,加权变量被定义为Canny点的熵,三个对称值和到本车的距离的函数。通过使用这个变量来应用每个泳道的非最大抑制过程,去除重叠的候选。图4为过程实例。

图4 对称轴线性抑制样例
所选择的候选者通过线性支持向量机(SVM)分类器,结合定向梯度直方图特征进行分类。我们根据模块开发和测试了两个不同的分类器。所有的候选项都调整为64×64像素的固定大小,以方便特征提取过程。后SVM分类器训练2000个样本,并测试1000个样本,而前向SVM分类器训练3000个样本,并用2000个样本进行测试。图5描绘前后训练和测试数据集的正面和负面样本。图6显示了使用HOG特征的线性SVM分类之后的车辆检测的一些示例,识别出的非车辆用红色框表示,而车辆用绿色表示。

图5 数据集正负样本示例
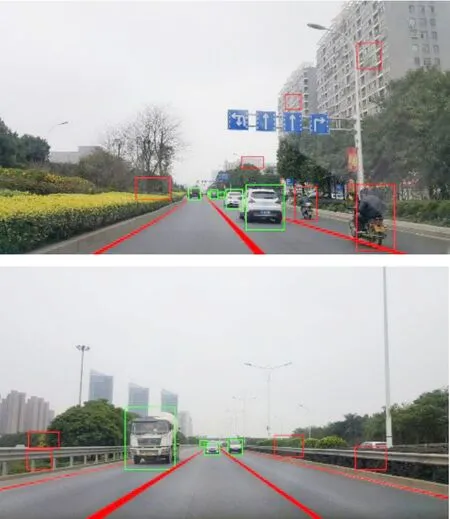
图6 具有HOG特征的线性SVM特征单帧分类示例
在连续检测到分类为车辆的对象预定次数之后,触发数据关联和跟踪阶段。数据关联问题通过使用特征匹配技术来解决。
车辆识别与跟踪是采用卡尔曼滤波来解决,故此必须定义动态模型和测量模型。卡尔曼滤波的目的是获得检测到的车辆更稳定的位置。此外,由于道路不平坦引起的车辆位置振动使得检测到的车辆的v坐标向上或向下改变几个像素。这种效果使得距离检测不稳定,所以需要卡尔曼滤波器来最小化这些类型的振荡。
3 总结
随着现实增强技术日趋完善,其应用越来越多元化。交通的智慧化也是有效规避交通事故发生的重要段之一。本论述所提出的现实增强设备能完成检测交通环境,主体相对位置、相对速度,车道检测,道路交通标志识别、车辆识别和跟踪、超车检测等。此外,该系统还结合了导航功能,基于现实增强技术的导航功能使得在用户使用导航功能的同时,提供更加便利,代表性的表现方式。本系统目前仍然存在些不足,例如载体等。但是它还可以在其它的交通领域应用,不仅限于汽车领域。相信随着科技的不断发展,终有一天交通行业会达到高度的智慧化,届时现实增强技术也会普遍的运用于交通行业。
