自航式潜艇舰桥的设计构想及运用
2020-06-12张博文王晟洵
张博文,王晟洵,李 辉
(中国人民解放军海军潜艇学院,山东 青岛 266000)
0 引言
纵观潜艇发展历程,增强潜艇隐蔽性的同时提高水下观通能力已成为潜艇的未来发展趋势。但在实际应用过程中,这两者往往具有难以调和的内在矛盾。潜艇在潜望深度航行时可将舰桥中的设备伸出水面实现观察与通信,然而在此深度下的潜艇极易被敌方探潜手段发现;潜艇在工作深度航行时能有效躲避敌方反潜平台探测和攻击,但此时潜艇几乎完全失去了对外观察与通信能力,变为一个“绝对黑体”,不利于有效发挥作战性能。前苏联海军潜艇技术在发展了半个多世纪后,潜艇下潜深度达到骇人听闻的720 m(阿尔法级),但这也仅仅是通过单纯的增加深度来增强隐蔽性,依旧未能解决水下观通与隐蔽性之间的矛盾。美军大力发展的水声通信能够完美地解决这对矛盾,却因水下复杂的声场环境而进展缓慢。针对上述问题,我们提出了一种既能保证潜艇在大深度下隐蔽航行,又同时具有完整对外观察与通信能力的新型设计构想,即自航式潜艇舰桥。
1 设计构想
1.1 设计理念
舰桥(指挥室围壳)作为潜艇的一部分,主要功能是安装升降装置(潜望镜、雷达等设备),用以潜艇潜望深度时的观察通信,本质上是一个固定在艇身上的任务载荷装载舱。而潜艇“上浮—观测与通信—下潜”这一过程本质上是将潜艇这样一个庞然大物作为该装载舱的动力来源使之完成机动,性价比过于低下。自航式潜艇舰桥的设计理念便是将舰桥这个装载舱加装独立的动力和指控系统,使之成为一个大型线控无人潜航器,通过其上浮和下潜来取代潜艇整艇的上浮和下潜,高性价比地完成潜艇作战航行所需的观通任务。
自航式潜艇舰桥是一种代替现有潜艇舰桥的多功能线控无人潜航器。通过穿过潜艇壳体的线缆受潜艇控制,融合了传统潜艇舰桥和传统无人潜航器的功能,可在潜艇大深度隐蔽航行的状态下自主航行至潜望深度,完成观察、通信、定位、搜索、侦查、诱骗等任务。并能即时地汇报情况、接收指令,与友军协同行动,为潜艇提供全方位的信息保障,极大地提高了潜艇的主动攻防能力。
该舰桥安装将不会对原艇体耐压和非耐压结构造成次生影响,仅需一根集成线缆穿过耐压壳体与艇内相关电子设备连接。该线缆有如下2点作用。
1)将舰桥导航控制系统与母艇相连,操作人员在母艇内通过手动或指控系统来控制舰桥航行和作业。
2)将舰桥功能阵列中光电桅杆、卫星通信天线、短波通信天线等设备接收和需发送的数据进行统一处理,可与母艇内指挥系统实现信息交互。
自航式潜艇舰桥采用操作员手动操控舰桥分离与对接的方法。位于潜艇内部的操作员通过外部摄像头手动操控调整舰桥姿态,折叠于舰桥舱壁外的围壳舵展开,舵效向上,主推进器启动,喷口向下,舰桥脱离潜艇开始自航。母艇和舰桥相连的线缆在两端同时放线,使得线缆在水中不受张力影响。该舰桥效果图如图1所示,三视图如图2所示。

图1 自航式潜艇舰桥总体示意图Fig. 1 General diagram of SPSB

图2 自航式潜艇舰桥三视图Fig. 2 Three-view of SPSB
1.2 结构布局
自航式潜艇舰桥总体呈类鹅卵石状设计,使用模块化舱体设计理念,并可发挥传统潜艇舰桥的大部分功能。内部包括升降舷梯以及副舰桥(瞭望平台),在舱体内外可安装航行所需的罗经、方向舵轮、汽笛、信号灯等。舰桥内部结构主要分为5部分,如图3、图4所示。
1.2.1 指令导航舱
内置舰桥保障监测系统、导航控制系统、水声探测系统、放线装置。该舱功能为实现舰桥基本的航行控制,其中导航控制系统单元通过放线装置连接数据线缆以维持舰桥与潜艇的稳定通信和数据传输。
1.2.2 机械设备舱
该舱分为2部分,装有舰桥主要的电子设备和机械器件,如水平舵控制系统、锂电池以及1台主推进器、1台侧推进器。除浮力舱外,舰桥在水下为通透设计,全舱为湿舱。根据参考资料得知在动横倾角为57.3°时受到的倾斜力矩最大[1],因此设定每当动横倾角超过50°时,开启侧推装置,以维持舰桥的稳定。
1.2.3 功能阵列舱
该舱装有雷达桅杆、光电桅杆、侦察天线(即电子支援桅杆)及综合通信天线(该天线集成了高频、甚高频通信天线和卫星通信天线)。该阵列舱底部设置一部集成计算机,收集处理以上功能阵列的通信数据,并与指令导航舱的通信线缆相连接,将数据传输至潜艇内部。
1.2.4 浮力调整舱
左右两边对称分布,通过小型高压气瓶和进排水系统实现舰桥的浮力调整,与艇对接后,通过母艇高压气系统向舰桥内气瓶供气。为了满足复杂的任务需求,舰桥中有多个备用气瓶保证其在紧急情况下的脱离和机动。
1.2.5 综合载荷舱
该舱可根据任务需求装备相应传感器、水声对抗设备、武器系统等。
在此处仅以水声对抗设备作为标准任务载荷。由于该舰桥最初的设计目的就是代替潜艇进行通信,确保潜艇本身隐蔽及安全。故若舰桥在任务区域通信被侦测或暴露时,可展开载荷舱中的拖曳阵列模拟潜艇整艇航行,同时潜艇断开与其相连的通信线缆,在舰桥的掩护下隐蔽逃逸。

图3 自航式潜艇舰桥功能模块图Fig. 3 Functional module diagram of SPSB
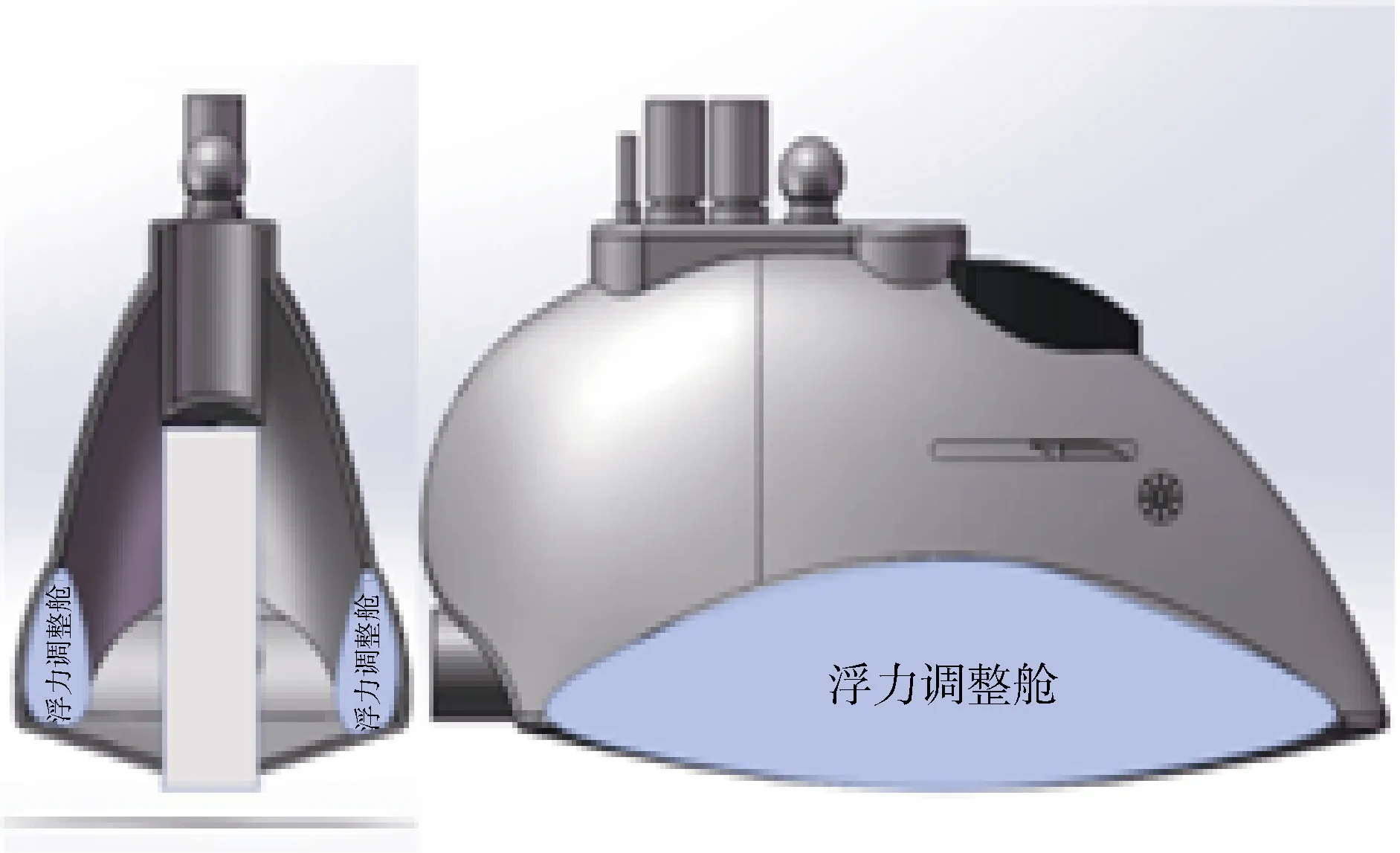
图4 自航式潜艇舰桥浮力模块图Fig. 4 Buoyancy module diagram of SPSB
2 运用研究
2.1 同步观通
使用时,舰桥脱离潜艇进行自主航行,潜艇通过线缆与舰桥进行双向数据传输并进行航行控制,舰桥机动至水下5~10 m,舰桥保持悬停,根据任务需求使折叠于舰桥内的功能阵列展开并露出水面,通过天线接收水面舰艇、作战飞机及其他作战平台发出的短波信号;通过收发卫星信号来实施隐蔽的双向通信以及对导航设备的校正,且在必要时可通过卫星天线与舰艇或基地进行卫星通信;通过光电桅杆和雷达进行对空搜索和扫海警戒。为保证潜艇隐蔽性,舰桥可在作业时保持静止以达到水面零航迹的效果,此时放线装置可继续放线,潜艇航行不受影响。在快速完成探测和通信后,舰桥围壳舵折叠收纳,同时收纳功能阵列,舰桥离开潜望深度返回母艇。此时舵效向下,主推进器喷口向上,同时线缆开始回收,舰桥通过手动或指控系统与母艇完成对接,并使用卡簧锁住。亦或根据需求继续保持浅深度待命。使用该舰桥进行同步观通的优势具体可以概括为以下几点。
1)舰桥体积小,相对于潜艇来说具有较高的目视隐蔽性和反射隐蔽性,装备该舰桥后潜艇不被敌反潜兵力发现的概率将提高数倍;
2)装备该舰桥后潜艇的机动攻击最大海域面积将提高数十倍;
3)潜艇可在大深度隐蔽机动至攻击阵位,随时接受友军指令;
4)潜艇可在大深度下进行天文导航、制导计算;
5)潜艇上浮前可提前观测海空状况,保证安全。尤其是在应用于常规潜艇时,能够在其浮起充电前侦测上方情况,极大地加大了常规潜艇的生存率。
2.2 隐蔽侦察
自航式潜艇舰桥在特定需求下可等同于一款传统大型线控无人潜航器,所使用的控制线缆原型为线导鱼雷导线,现有技术下的线导鱼雷导线长度可达到14 000 m,直径0.25 mm,抗断力98 N[2]。远大于当今所有潜艇的最大潜深,因此在该类导线的牵引和指控下,自航式潜艇舰桥具有极大的有效作业范围,完全可满足自航式潜艇舰桥在远离母艇数十千米的距离上侦测海洋环境(如有效避碰和预防水下断崖);或于潜艇对岸打击时独自进入危险的浅水区域侦查,而在此期间,母艇可以选择合适的隐蔽阵地坐底或悬浮,即使舰桥作业时被侦测,也能最低限度地暴露母艇的准确位置。使得潜艇在不暴露位置和行踪的前提下获取更多利于执行任务的信息,既提升了潜艇本身的作战效能,也保证了潜艇的航行安全。此外,舰桥可与所在海域内其他预设UUV进行协同导航,舰桥放出水声信号,预设UUV上的双水听器通过测量水声信号相位差并结合距离信息来确定自己的位置[3]。
2.3 诱骗掩护
当潜艇占领射击阵位后,时常会遇到鱼攻角不利的情况(敌舰舰艏朝向我艇鱼雷发射线),此时不能立即进行鱼雷射击,需要重新进行调整,一旦调整便会导致态势的改变,这相当于要重新占位[4],效率较低,因此,可使用自航式潜艇舰桥对敌舰进行诱骗。舰桥通过升起光电桅杆高速航行以制造诱骗航迹,通过功能载荷仓模拟整艇声场,使敌舰误判我艇位置,做出错误的规避机动,将其引诱至正横朝向我艇鱼雷射线的航向,大大地提高了直进射击攻击效率。
当潜艇处在遭到敌对反潜体系联合围剿等紧急情况下,潜艇内人员可控制舰桥松开卡簧,切断线缆,使舰桥脱离母艇自主航行。此时舰桥和母艇可选择的战术机动如下。
1)通过指控系统,舰桥释放出综合载荷仓中的拖曳线阵列,模拟潜艇整艇进行航行。此时母艇全艇静默,通过舰桥模拟整艇运动来迷惑敌反潜体系,帮助母艇尽快脱离危险海区。
2)舰桥与母艇反向机动,与母艇间达到一定距离后(使敌反潜体系无法通过舰桥推测出潜艇位置),向基地进行延迟发报,报告潜艇处境。
需要说明的是,当根据威胁程度和任务需求抛弃自航式舰桥时,不会对潜艇母体流线型、整体流体阻力和机动性能有大的影响,潜艇水下航行几乎不会受到影响,基本的惯性导航设备和水声探测设备将确保潜艇能安全返回母港。
舰桥脱离前后状态如图5、图6所示。

图5 脱离前状态Fig. 5 Pre-detached status

图6 脱离后状态Fig. 6 Post-detached status
3 关健问题
3.1 尺寸问题
据当前传统潜艇舰桥尺寸来看,该设计的体积将接近160 m3,较大的体积会对无人潜航器的航行、作业造成一定的影响。但若想拥有全面的功能,较大的体积是无法避免的。今后的工作方向将会是在大体积和多功能这对矛盾中寻找最优解,使得在保证功能的情况下,做到无人潜航器体积小型化。
3.2 水下随动对接与分离控制
在舰桥与潜艇的脱离与对接过程中,当前使用的是操作员通过外部摄像头手动操作的方法。但此方法在应用上仍有较大的困难,当舰桥和潜艇受到水下流等外部因素的干扰时,对接时的稳定性将会受到影响。今后的发展趋势将会是使用多种传感器辅助的更为稳定、准确、迅速的手动或自动对接。美军在潜艇上设置船坞或储存槽,采用驱动机构,固定、布放和回收水下无人潜航器的坞载方式很值得借鉴[5]。
3.3 水密问题
自航式潜艇舰桥的安装会导致潜艇耐压壳体上有巨大的切割开口,对这种尺寸的开口进行水密处理几乎是不可能完成的任务。因此,未分离时,舰桥与母艇相互隔绝,仅有一个升降舷梯口和线缆口穿过非耐压壳体与耐压壳体相连,供人员出入舰桥。
3.4 对接设备的强度
潜艇航行以及水下湍流的流体阻力,会使对接设备受到较大的应力,若对接设备无法承受这种应力,就会有航行时自航式潜艇舰桥从艇体脱落的危险。以现有材料强度来看,满足这种需求难度较大。由于连续开孔和环形肋骨之间的互相影响基本上与单开孔的相一致[6],因此增加固定结构数量能一定程度上解决此问题。
3.5 操纵性分析
大型潜航器的操纵性依然是一个世界性难题。由参考资料知,影响潜航器操纵性的因素很多,但主要因素是外形、质量分布和纵面布局。由于设计原因,对外形与质量分布进行改变难度较大;纵面布局方面则要求重心的纵向位置要尽可能向浮心靠近,以保持直航时的平衡系数。同时要求重心具有侧移量,若其值选择得当,则产生的横滚力矩将平衡掉推进器的失衡力矩。此外,可借鉴美军MK48鱼雷的设计,设置相互独立的十字型鳍和X型舵[7],可大大地改善潜航器的操纵性。
3.6 收放线技术
收放线技术可借鉴线导鱼雷收放线技术,相关专著对于各种技术细节已有详尽介绍[8]。在这里需要指出的是,由于线导鱼雷导线张力较小,因此对接时需要舰桥与母艇高度协同。舰桥靠近潜艇,开始收线,当线上张力达到一定值时,停止收线,舰桥继续靠近潜艇,靠近到一定程度后继续收线,不断重复此过程。始终保持线缆长度大于母艇与舰桥间的距离以使导线上张力很小,直至对接完成。
4 结束语
随着海洋装备技术的发展,无人潜航器的机动能力将愈发灵活,载荷将愈发多样,功能将愈发全面,因此最后完全取代传统潜艇舰桥是一种可能的趋势。在进行近海作战时,我方核潜艇能够在信息保障的协助下隐蔽穿越海峡、水道,并对敌方的海上交通线进行威慑。常规潜艇则可更隐蔽高效地对重要峡湾水道进行封锁。在远海执行任务时,能够改善潜艇远海的定位精度,并能一定程度上使潜艇融入通信网络体系,大大提高潜艇的任务效能。
