波浪滑翔机海上试验研究
2020-06-12王海军
王海军
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
波浪滑翔机(Wave Glider,简称 WG)是由美国Liquid Robotics 公司[1]于2009年成功研发的一种新型无人自主海洋监测装备,它兼具传统水面定点浮标可以观测海平面上气象要素,有动力AUV可以按照规划航路进行机动观测,以及无动力水下滑翔器大范围探测的优点[2]。其创新性地将海洋中无穷无尽的波浪能转化为自身前进的主驱动力而无须提供额外的助力,辅以太阳能充电系统作为传感器、通信和控制系统的电能来源,续航能力达到前所未有的高度。波浪滑翔机具备自主航行控制、数据实时传递、使用灵活、可遥控等功能[3]。波浪滑翔机还具有续航时间长、易操作、高自治性和全天候实时观测等优势,能够高效完成多项海洋环境检测和信息收集任务。由于波浪滑翔机具有制造成本低、实时数据传输、续航能力强、自主可控等特点,近年来在国内外受到了极大的关注。国外波浪滑翔机技术已经相对成熟,美国Liquid Robotics公司的波浪滑翔机已实现产品化[4],并在海洋研究、气象观测、军事等领域得到实际应用。国内波浪滑翔机经过近些年的发展虽与发达国家相比还有较大差距[5],但在国家863计划及国家重点研发计划的支持下也已取得长足的进步。中国船舶重工集团有限公司第七一〇研究所突破了波浪滑翔机平台的一系列重大关键技术,目前已进入设计定型和示范应用阶段,并完成了小批量生产。国内从事波浪滑翔机的科研单位[6]还有国家海洋技术中心、中国海洋大学和哈尔滨工程大学等科研院所。海上试验是海洋装备实现产品化[7],投入实际应用前最关键的阶段[8]。2019年5月9日-8月15日,由天津大学、中国船舶重工集团有限公司第七一〇研究所、国家海洋技术中心、中国海洋大学等单位共同承担的国家重点研发计划“海洋滑翔机改造与协作观测技术”课题在南海进行了自测模拟海试。本文介绍了此次海试的主要试验对象、试验海区、试验过程及试验数据分析,为“海鳐”波浪滑翔机产品设计定型和示范应用奠定基础。
1 试验对象
本次试验对象之一为中国船舶重工集团有限公司第七一〇研究所研制的“海鳐”波浪滑翔机,编号为2号、3号、4号。该波浪滑翔机采用模块化设计思路,水面艇采用开放式结构并由轻型复合材料和钛合金制成,脐带挂缆连接水下驱动单元和水面艇。在波浪能的作用下水下驱动单元输出牵引力带动水面艇向前航行,导航控制中心输出指令,操控装配在水下驱动单元上的舵机控制波浪滑翔机的航向。波浪滑翔机主要系统设备包括:平台驱动系统、导航控制系统、能源与配电系统、水面通信定位系统、岸基控制中心等。“海鳐”波浪滑翔机外形如图2所示,主尺度及主要参数见表1。

图2 “海鳐”波浪滑翔机Fig. 2 “Sea Ray” wave glider

表l 波浪滑翔机主尺度及主要参数Table 1 Main dimensions and parameters of the wave glider
2 试验海区
波浪滑翔机海上试验海区位于南海中东部(116°E,19.33°N)附近海域,水深约为1 000~2 500 m,样机布放期间风力不大于8 m/s,浪级不超过4级,海区内的流速小于1 kn,周围10 km内目测无渔网或其它设施,符合试验条件。
3 试验步骤
1)各系统设备启动,检查平台驱动系统、航行控制系统、能源与配电系统、水面通信定位系统、岸基控制中心等是否工作测试正常;
2) 检查各个密封舱体的气密性是否满足要求;
3)根据海试大纲和航次任务书要求,通过岸基控制中心预置控制参数和航路参数,进入导航模式,监控全系统工作是否正常;
4)母船航行到达布放点后,通过专用吊布释放装置将波浪滑翔机布放下水;
5)岸基控制中心与滑翔机进行北斗卫星通信,周期性地接收波浪滑翔机发送的数据报文并存储;
6)岸基控制中心对波浪滑翔机工作状态进行判别,发送修改控制参数或航路参数调整波浪滑翔机试验内容;
7)试验结束后,发送停止航行指令,母船根据波浪滑翔机的实时位置,机动到波浪滑翔机附近,准备进行回收操作;
8)通过专用打捞工具,分别打捞波浪滑翔机的水面艇和水下驱动单元,完成系统回收;
9)切断系统电源,按照使用规程对产品进行冲淡维护保养。试验时,波浪滑翔机通过北斗卫星通信向岸基控制中心发送以下数据信息:GPS位置信息、工作状态、电池电量、系统电压、航路号、航路点号、航行速度、航向。通过试验数据分析,可得到波浪滑翔机航行距离、航行时间、航行速度、位置保持精度等参数。
4 海试结果及分析
4.1 波浪滑翔机航行性能分析
4.1.1 航行速度
航行速度计算方法:1 h内波浪滑翔机航行距离除以3 600 s。航行距离依据记录的GPS轨迹点,计算所有相邻点间距离的累加和。试验中取连续约30 km直线距离,测试4号波浪滑翔机航行速度,处理结果表明:12 h滑翔机平均航行速度大于1 kn,数据曲线如图3所示。图3(a)中红色虚线为波浪滑翔机实际航行轨迹,黑色虚线为试验规划路径。图3(b)中红色虚线为波浪滑翔机平均航行速度,蓝色曲线为每10 min计算的波浪滑翔机的航行速度。

图3 航行速度测试轨迹及结果Fig. 3 Sailing speed test trajectory and result
4.1.2 航行时间和里程
3号样机2019年5月11日布放,受休渔期结束影响,于8月13日回收,在位连续航行时间94 d,其中定点位置保持观测时间为47 d,航行总里程3 069.3 km。试验过程中平台受夏季海洋环境的影响,回收后表面附着较多海生物。该试验样机水面艇底部和水下驱动单元的翼板等部分表面进行了防污处理,通过试验对比发现经过防污处理的表面附着海生物较少,相反未进行防污处理的部分,附着海生物较多。如图4。
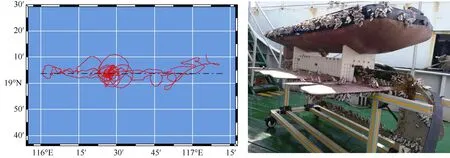
图4 长航程试验轨迹和试验后样机状态Fig. 4 Long range test trajectory and product status after test
4.1.3 位置保持精度
2号、3号、4号样机连续12 h位置保持半径偏差分别小于40 m,70 m,140 m。其中2号和3号样机的期望半径为10 m,4号样机的期望半径为100 m。从图5中可以看出2号样机的均值区域处于40 m左右,有效地反映了波浪滑翔机的区域控位能力。

图5 定点位置保持轨迹及偏差Fig. 5 Site-specific location holding trajectory and deviation
4.1.4 抗恶劣海况生存能力
波浪滑翔机经过了2019年4号台风“木恩”、5号台风“丹娜丝”、7号台风“韦帕”及9号台风“利奇马”的考验,其中“木恩”台风经过时最大浪高达到6.6 m。台风经过时海况及样机工作情况如图6所示。2019年4号台风木恩(热带风暴级)于7月2日下午的南海热带低压TD01,7月3日7时,中心风力18 m/s,中心气压992 hPa。
4.1.5 电池电压数据分析
本次海试过程中波浪滑翔机的电池电压变化如图7所示,电压均值在16.6 V左右,电压为16.8 V时电池电压基本处于满电状态,随后电压呈规律性变化,在16.4~16.85 V之间波动。随着昼夜交替,太阳辐射强度周期性变化,系统用电有限,从而导致电池电压周期性变化。综合3套样机的试验情况表明:整个海上试验期间,系统电压变化较为平稳,具有一定的规律性。在台风经过期间由于白天太阳光照强度的变化导致电池电压出现了一定程度的下降。总过程系统电源电压工作稳定可靠。

图6 经受台风考验的海况及位置保持状态Fig. 6 Typhoon-tested sea conditions and location maintenance

图7 系统电池电压变化情况Fig. 7 System battery voltage changes
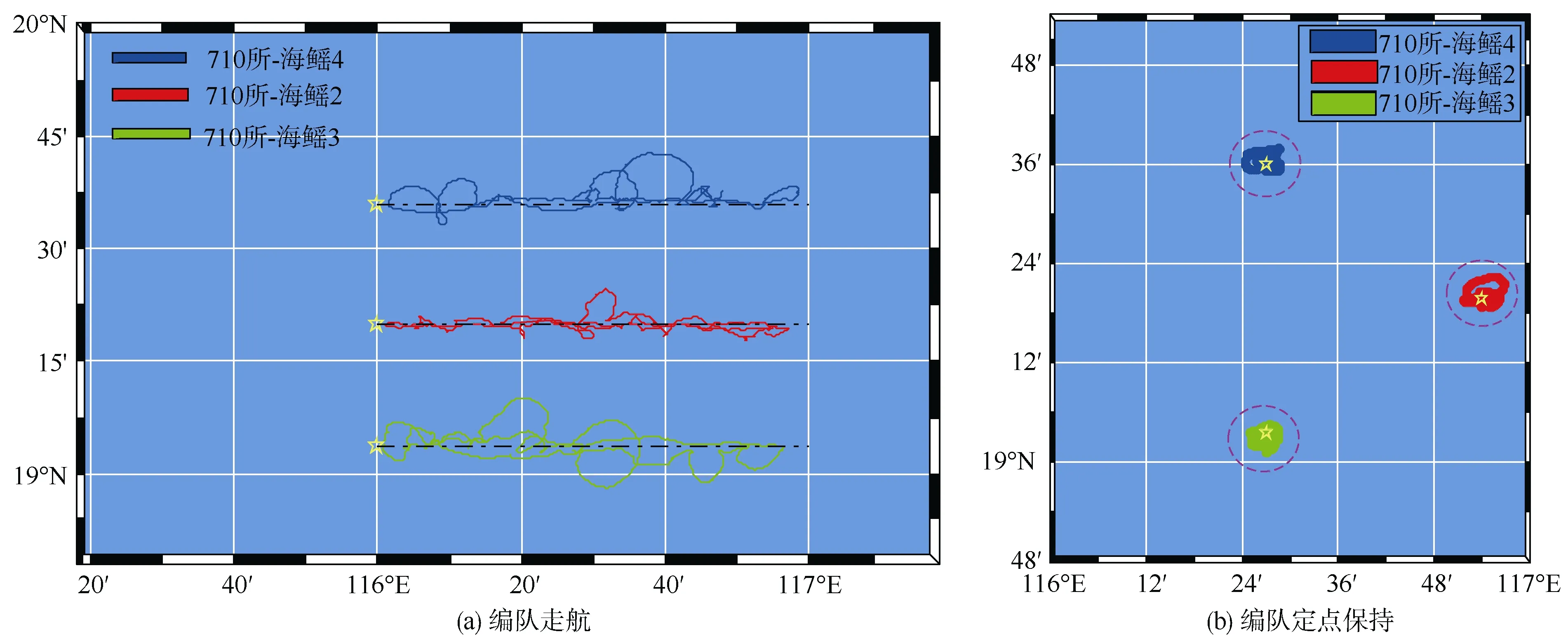
图8 编队协同航行及定点位置保持Fig. 8 Collaborative formation navigation and site-specific holding
4.1.6 北斗通信验证情况
卫星实时通信是波浪滑翔机平台的优势,卫星通信的成功率是同行专家和用户特别关心的问题。本次海试过程中,根据岸站接收数据情况分析,卫星通信成功率在98%以上。并且在台风经过时,岸站能够实时稳定可靠接收到水面艇发回的数据报文,控制指令收发正常,充分验证波浪滑翔机在恶劣海况下实时通信的能力。
4.2 编队协同航行性能分析
2号、3号、4号样机分别开展了15 d的编队协同走航试验和15 d的编队定点位置保持试验,运行轨迹如图8所示。图8(a)中“★”表示走航起始点,黑色虚线为规划航路,左右距离100 km,两条航线之间的距离30 km,样机在航线左右往返航行。图8(b)中“★”表示定点中心位置,3个定点保持的位置距离约为60 km。3台样机在各自的位置定点保持15 d。
在海上试验中“海鳐”波浪滑翔机与国内相关单位研制的波浪滑翔机开展了性能比测,走航对比测试结果如图9所示。图中黑色虚线为规划航路,绿色线为“海鳐”波浪滑翔机实航轨迹,红色线和蓝色线为其它单位研制产品的轨迹。对比测试结果表明:“海鳐”波浪滑翔机的航行控位性能较好。
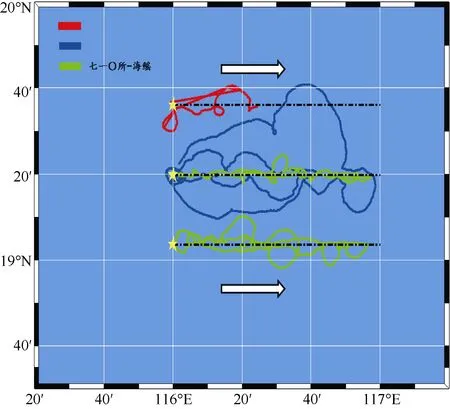
图9 3家研制单位波浪滑翔机性能比测情况Fig. 9 Performance comparison of wave gliders from three research institutes
5 结束语
本次海上试验波浪滑翔机最大航程达到3 069.3 km,连续航行时间94 d,经历多次台风考验,3级海况下航行速度大于1 kn,12 h连续位置保持精度小于150 m。考核了波浪滑翔机编队协同航行和编队位置保持的能力;验证了波浪滑翔机在6级以上高海况的航行能力和生存能力,试验数据表明:波浪滑翔机在6级以上海况下能够生存且工作稳定。试验过程中,对波浪滑翔机能源补充和北斗卫星通信情况测试,表明波浪滑翔机的能源相对充足,在各种海况条件下北斗卫星通信稳定可靠。本次海上试验对波浪滑翔机样机系统和设备的功能进行测试,检验波浪滑翔机在复杂海洋环境下的作业功能和综合性能;为波浪滑翔机设计定型及海上应用示范奠定了基础。
