基于PID控制的电动汽车直流驱动电机调速研究
2020-06-11王露峰
摘 要:无刷直流电机作为驱动电机广泛应用于电动汽车中,具有结构简单,使用寿命长,可靠性高等特点。电动汽车电机功率的控制一般是通过驾驶员加速踏板位置计算所需功率,VCU依据功率计算出电机转速。PID控制广泛应用于工业控制领域,具有算法简单,鲁棒性好的特点。文章通过设置PID的参数,探讨电动汽车直流电机调速响应状态。
关键词:无刷直流电机;PID控制;整定
中图分类号:TM33 文献标识码:A 文章编号:1671-7988(2020)10-106-03
Study of PID Control System Based on DC Traction Motor Speed Control Systemfor Electric Vehicle*
Wang Lufeng
( Shaanxi College of Communication Technology, Shaanxi Xian 710018 )
Abstract: Brushless DC motor is widely used in electric vehicles as a driving motor, which has the characteristics of simple structure, long service life and high reliability. The control of electric vehicle motor power is generally based on the driver's accelerator pedal position to calculate the required power, and VCU calculates the motor speed based on the power. PID control is widely used in the field of industrial control, with the characteristics of simple algorithm and good robustness. This paper discusses the response state of DC motor speed regulation of electric vehicle by setting PID parameters.
Keywords: Brushless DC motor; PID control; Setting
CLC NO.: TM33 Document Code: A Article ID: 1671-7988(2020)10-106-03
引言
无刷直流电机采用的是位置传感器采集位置信息,通过电机控制器选择励磁空间矢量,并通过PWM控制电机的电扭的方式来电机调速,功率的控制是使用调速器控制IGBT占空比实现对HESS总线供电调节。
1 电动汽车驱动电机工作特点
电动汽车驱动电机工作在转速变化多变,转矩变化范围广的区间。无刷直流电机系统具有非线性、多变量、强耦合的时域变化特点。为了能准确的理解驾驶员的意图将电门位置传感器采集到的数据分解为稳态意图和瞬态意图。稳态意图反映了当前位置的一般功率需求,瞬态意图主要通过驾驶员踩下电门踏板的速度判断的,主要体现了所需功率变化的速率。电机控制器不断调整稳态数据和瞬态数据在VCU中计算所得功率,使之与实际需求相匹配。其控制原理如图1所示。
2 PID控制器
2.1 PID控制器控制原理
PID控制器(Proportion Integration Differentiation.比例-积分-微分控制器),由比例单元 P、积分单元 I 和微分单元 D 组成。通过Kp,Ki和Kd三个参数的设定。PID控制器主要适用于基本线性和动态特性不随时间变化的系统。
PID 控制器是一种常用于工业控制领域的反馈回路部件。这个控制器的控制原理是:设定一个参考值,把收集到的数据和这个参考值进行比较得到差别,并把此差别当做新的输入值。如图2所示。最终可使得系统的数据达到或保持在参考值。
相比于其他简单的控制运算,PID控制器可根据历史数据及差别的出现率来调整输入值,这样可使系统更加准确,更加稳定。其控制比例控制也称“有差控制”,输出的变化与输入控制器的偏差成比例關系,偏差越大则输出越大。偏差的比例、积分、微分线性组合在一起构成控制量,并对PWM控制器的占空参数进行控制,其控制传递函数可以表达成:
根据图2控制器原理图,推导PID控制参数KP、KI、KD自调整公式:
其中:
KP0、KI0、KD0分别为控制器初始控制参数。
KP、KI、KD分别为控制器的输出参数。
uP、uI、uI分别为控制器的比例系数。
2.2 PID控制器参数整定
参数整定是PID控制器控制系统设计的核心内容。依据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的主要有理论计算整定法和工程整定方法。理论计算整定法,主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法得到的计算数据必须通过工程实际进行调整和修改才可以使用;工程整定方法,主要依据工程经验,可直接在控制系统的试验中进行,非常简单、易于掌握,广泛用于工程实际中。
工程整定方法,主要有临界比例法、反应曲线法和衰减法。虽然这三种方法各有特点,其共同点是控制器的最终参数在实际应用中进行整定。也就是说,无论采用哪一种方法,都需要在实际运行中进行调整与完善。
本文采用的是临界比例法。整定步骤如下:(1)首先预选择一个足够短的采样周期让系统工作;(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;(3)在一定的控制度下通过公式计算得到PID控制器的参数。
3 仿真模型建立
选取某型驱动电机为研究对象,其参数如下表1所示。
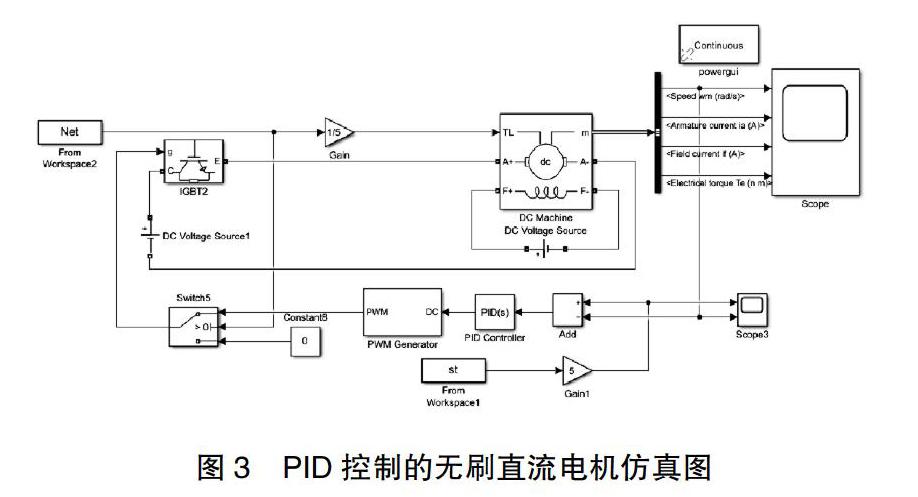
在Simulink仿真环境中建立仿真模型,动力电网选择380V电池组,电机选择系统自带的直流无刷电机模块。其模型如图3所示。
模型中电机选取直流无刷电机,电机采用转矩参数输入,PWM跟踪控制励磁强度从而实现转速控制。st模块是从工作空间读取的车轮速度时域信号;Gain模块参数为主减速传动比;Net为车轮作用于地面的驱动力矩。主要控制原理:通过Add模块对比传动系转速和电机转速,将结果送入PID控制器,如果转速差距大,PID控制器降低PWM Generator的占空比,以此增加IGBT的开打时间。当转速差距小时候,提高PWM Generator的占空比实现对HESS总线输电功率的控制。PID以此围绕转矩-转速曲线调节电机供电。
4 仿真结果
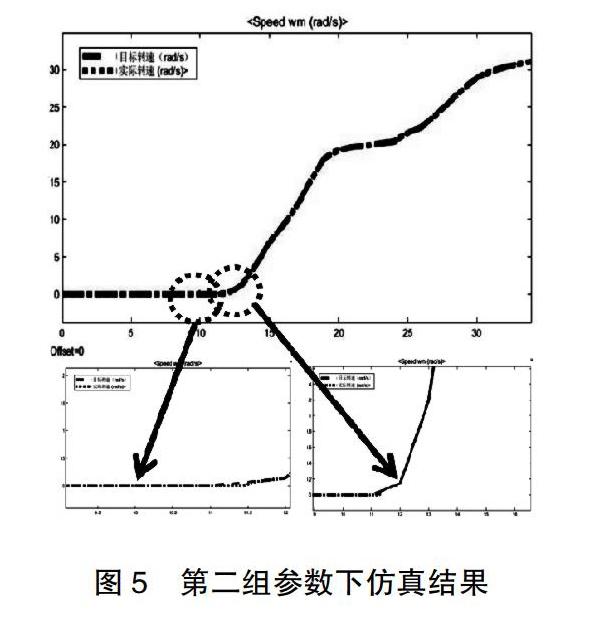
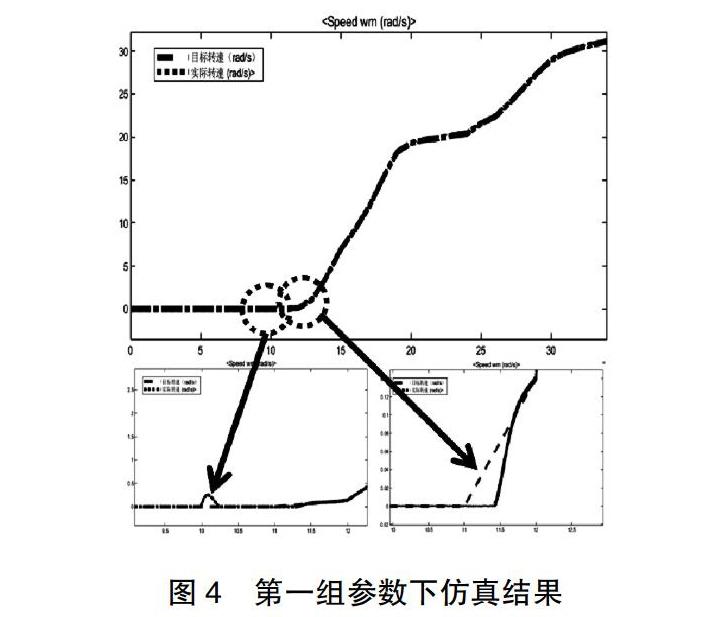
驅动电机功率目标为WLTP_class_3循环工况,Simulink选取连续模块,仿真步长0.0001秒,使用obt45求解器求解,仿真时间36。通过实验凑试法调整各参数。当uP=5,uI=10,uD=0.8时仿真结果如图4所示;当uP=0.9,uI=50,uD=0.01时仿真结果如图5所示。
5 结论
图中红色曲线为车辆的目标转速,蓝色曲线为经过PID控制后的电机实际转速。PID控制参数整定对控制灵敏度及误差有至关重要的影响,通过仿真可以看出,在第一组数据下PID控制器在第一个误差处发生了超调,第二个误差处发生了响应不够及时的问题。通过试凑法将参数调整为第二组后曲线得到了明显的改善。误差主要发生在转速突变较大的区域,比如汽车起步,急加速等工况。而在一般工况两组调节参数都能较好的控制电机。通过多次试凑能将控制调整至较好的工作条件。
参考文献
[1] 何丽华.反应堆功率控制系统PID控制器参数整定及仿真[J].核电子学与探测技术,2013.
[2] 黄利泉.PID控制算法在温度自动控制系统中的应用[J].内蒙古石油化工,2019.
[3] 王广丰.基于arm微处理器的嵌入式数控系统的设计与实现[D].南京:南京航空航天大学硕士论文,2019.
[4] 张立.变速积分PID算法在温度控制中的应用[J].工程与实验, 2011.
[5] 王露峰.基于模糊PID控制的客车主动空气悬架研究与仿真分析[D].西安:长安大学,2017.
