面向移动瓶颈的高速公路流量控制模型研究
2020-06-11徐建闽杨招波马莹莹
徐建闽,杨招波,马莹莹*
(1.华南理工大学 土木与交通学院,广东 广州 510641; 2.东南大学 现代城市交通技术江苏高校协同创新中心,江苏 南京 210096)
2018年10月24日上午9时港珠澳大桥正式通车,标志着我国高速公路建设取得了又一标志性进步。据有关研究表明,我国高速公路承载了全国70%的客运量和40%的货运量[1],特别是重大节假日期间,经常在高速公路还没有达到其最大通行能力就已拥挤不堪。这是由于我国高速公路存在超载、满载、性能不佳的货车与其他车辆混行,在沿路形成大量的“移动瓶颈”[2]所致,从而使高速公路通行能力大大降低。
高速公路移动瓶颈是指多车道中的连续流被一辆或多辆慢速行驶的车辆所影响的情形,这种慢速行驶的车辆可能是一辆满载的货车、超大型货车或一个长车队。受慢车最大车速限制,后面车辆要么换道超车,要么减速行驶。由于移动瓶颈具有随机性和移动性,对其优化管理具有较大难度。随着智能网联汽车(ICV)和车路协同技术(I-VICS)的出现,给车辆在高速公路运行过程中提供基于车辆位置和运行状态的精准性控制和引导成为了可能,对高速公路车辆、设施的动态控制研究成为了重要的发展趋势。
车路协同是基于无线通信、传感探测等技术进行车辆和道路信息的获取,通过车辆与车辆、车辆与道路进行信息交互和共享,实现车辆与基础设施之间的智能协同与配合,最佳利用系统资源、改善道路交通现状、缓解交通拥挤的目标[3]。车路协同的技术内涵有3点:1)强调人-车-路系统协同;2)强调区域大规模联网控制;3)强调利用多模式交通网络与信息交互。文献[4-5]分析了高速公路汇流区的交通事故特征,并根据车路协同技术建立了入口匝道合流区车辆安全预警方法和模型;杨晓芳等[6]在车辆-车辆通信环境下通过获取周边车辆运行状态信息,进而建立入口匝道合流影响区车辆决策机制模型,并通过数值实验分析得出该模型有效地提高了合流区的通行能力;Park等[7]针对车路协同环境提出通过高速公路主线车辆换道为匝道车辆提供更多的可汇入间隙,并建立了主线车辆换道模型;Wang等[8]提出了车路协同环境下自动驾驶车辆在入口匝道处的安全汇入方法和模型;Hayat等[9]研究并建立了车路协同环境下匝道汇入车辆安全辅助驾驶系统。
大多数现有研究侧重于算法和模型的建立、改进以及控制效果的评估,建立的控制模型相对简单,大多数控制策略都是通过设置约束直接实现的,并且缺乏对控制系统的深入研究,且控制系统经常被提出用于传统的脱机控制设备,智能性较差,其发展受到一定的约束。为了克服已有研究的缺点,本文利用模型预测控制研究了控制策略对交通流的影响,建立了面向移动瓶颈的高速公路流量控制动态优化模型。本文所建立的模型能够预测系统未来的动态行为变化,它的处理方式通过约束条件建立并求解一个非线性规划问题,从而把约束加到未来的输入、输出或状态变量中,因此其最大特征是能够较好地显式处理约束。
1 移动瓶颈的MPC描述
MPC(model predictive control,模型预测控制)是一种反馈控制算法,是一个迭代过程,它通过优化控制策略尽可能拟合预测轨迹以达到最优控制的目的。本文考虑建立移动瓶颈车辆与周围交通相互影响的微观-宏观模型,根据约束条件和优化目标建立内部预测模型,利用最小化成本函数评估模型对交通流的影响,提出一个流量控制模型问题。本文使用的MPC方法是根据高速公路移动瓶颈交通流特征确定预测模型,结合可变限速和出入口匝道控制率确定约束条件,通过选取最合适的交通性能指标综合评估控制MPC模型策略对交通流的影响。它是一种基于模型的高级进程控制方法,能够考虑时间以及空间状态变量的各种约束,利用过程变量目标和限制计算因变量的未来变化,以保持因变量接近目标,同时遵循独立变量和因变量的约束。它是依赖于过程的动态模型,能够预测未来事件并能够采取相应控制措施。本文同时也研究一种通过控制不同采样周期输入流量来反映并控制车辆状态变化的方法。
MPC基本结构框架如图1所示,其核心可以用基于模型的预测、滚动优化和前馈-反馈的控制结构这3条基本原理加以概括。
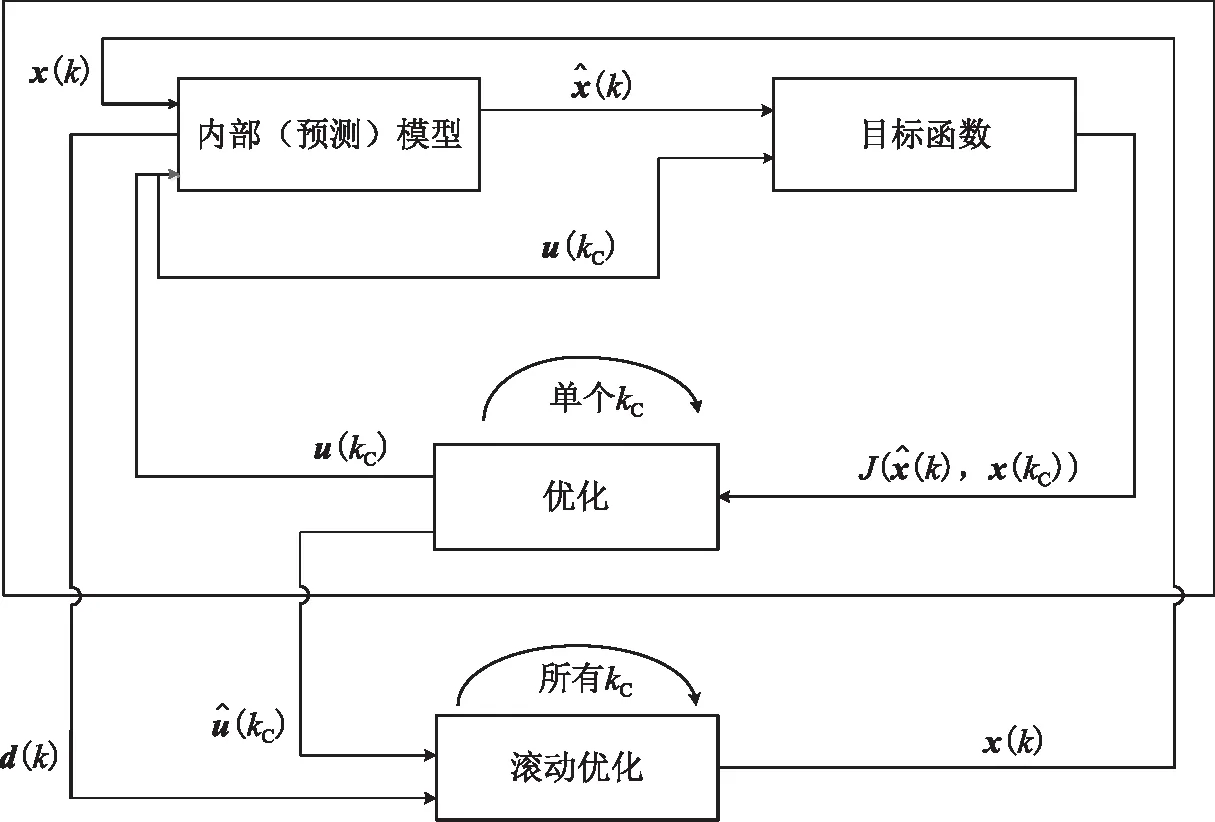
图1 MPC结构Fig. 1 MPC structure
1.1 内部(预测)模型
模型是预测控制的基本元素。需要一个描述交通流状态行为的模型,能够根据系统k时刻的状态和控制输入,预测到k+1时刻的输出。同时k时刻的输入正是用来控制系统k+1时刻的输出,使其最大限度地接近k+1时刻的期望值。本文主要预测未来优化时域交通流状态,根据高速公路移动瓶颈的交通流特性,输入特征可以参照交通流理论分为当前交通流参数(如流量、密度、速度)、交通干扰参数(缓慢行驶车辆的速度、缓慢行驶车辆数)以及交通控制参数(可变限速、高速公路出入口匝道控制率)。其中,可变限速是指为实现车流平稳行驶而实时根据高速公路交通状况动态调整限制速度值,出入口匝道控制率是指控制匝道进入交通流量占道路本身容量的比率。假设采样周期为T,采样周期序号为k,优化时域为TC,序号为kC,并且满足TC=MT,且M取整。预测公式模型可以表示为
(1)

1.2 滚动优化

1.3 反馈调节

2 基于MPC的控制模型建立
2.1 预测模型
常用的交通流模型由于研究方法的不同,可以分为微观车辆跟驰模型、元胞自动机模型、宏观连续模型和中观气体动理论模型。本文考虑采用经典的交通流LWR模型,该模型为交通流的一阶连续介质模型,可推演交通流宏观状态演化过程。该交通模型从宏观的角度将交通流三参数(流量Q、速度v、密度k)的关系描述为如图2所示。
结合现代智能交通发展,智能网联汽车和车路协同技术为车辆在高速公路运行过程中,基于车辆位置和运行状态的精准性控制和引导提供了可能性,因此本文针对移动瓶颈研究考虑缓慢移动车辆的存在以及与周围交通相互影响的作用,在传统LWR模型基础上,提出一种既描述交通密度总体趋势偏微分方程(PDE),又考虑移动瓶颈运行轨迹常微分方程(ODE)的组合模型[10-11],该模型变量约束是由多项式软化子来逼近,能够保持模型约束的平稳性。完全耦合的PDE-ODE模型是:
(2)
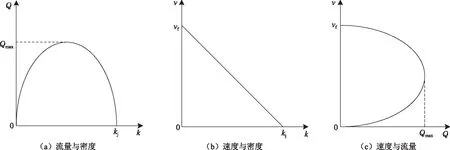
图2 交通流三参数的关系Fig. 2 Relation diagram of three parameters of traffic flow

ω(k)=min(vb,v(k))。
(3)
式中vb为慢车车辆最大速度。由于慢车车辆无法超车,因此慢车自身最大车速vb应不大于汽车的最大车速vf(vb≤vf),因此,当交通不拥挤时,它会以最大速度行驶,当平均速度下降时,特别是慢速车辆无法超车时,它会根据周围的交通情况来调整速度(如图3所示)。
同时,缓慢移动的车辆由于充当移动瓶颈车流约束,可以用式(2)中的第5个关系式表示,其中α∈[0,1],它表示由于大型车的存在而导致道路容量的减少率。
输入流Qin与输出流Qout由以下条件给出[12],其中Tf为仿真时间:
(4)
Qout=0.5Qmax,∀t∈[0,Tf]。
(5)

2.2 优化目标
需要找到最合适的交通性能指标,即最小化的成本函数,来评估控制策略对交通流的影响。在交通效率方面,对于驾驶员出行来说出行时间是一个需要分析的关键量,因此本文选取行程时间作为其中优化目标之一,根据时间和距离计算区域[x1,x2]×[t1,t2]的行程时间TTT[13](total travel time),其计算公式为
(6)

图3 汽车速度变化情况Fig. 3 Changes of vehicle speed
延误时间也是一个不可忽略的重要关键量,其定义为行程时间与自由行驶时间的差值,计算公式为
TD=TTT-TNT。
(7)
其中,TNT(normal travel time)为自由行驶时间。
(8)
为了直观地显示高速公路的拥挤程度,选取排队长度所占路长的百分比作为参考指标,其计算公式为
(9)
在交通环境方面主要考虑燃油消耗所引起的环境污染,为减少其影响,将燃油消耗作为成本函数,通过车辆速度获得燃油消耗情况,六阶多项式FC近似表达了燃油消耗情况[15],通过速度获得的燃油消耗可以看出其成倍增加(如图4所示)。其计算公式为
FC(v)=5.7×10-12v6-3.6×10-9v5+7.6×10-7v4-6.1×10-5v3+
1.9×10-3v2+1.6×10-2v+0.99。
(10)
式(10)中:FC(v)的单位是L/h,v的单位是km/h。通过选择合适的优化指标来进行目标控制,优化目标的选取采用了多个最小化成本函数,故该优化问题为多目标优化问题。
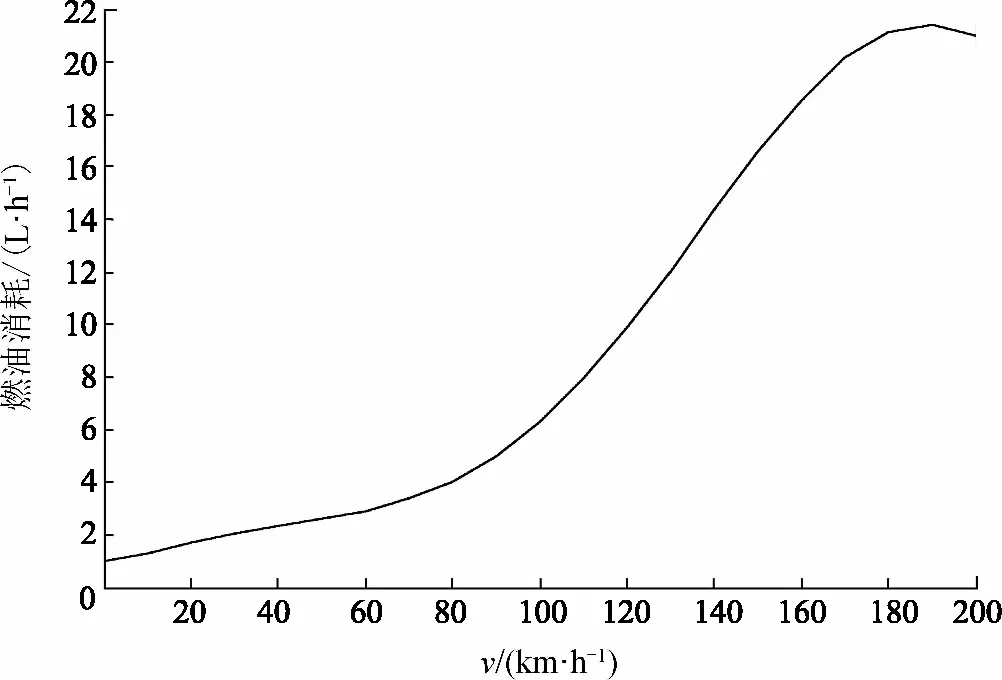
图4 燃油消耗情况Fig. 4 Fuel consumption
2.3 约束条件
约束条件的确定主要是结合可变限速和出入口匝道率来选取。对于高速公路可变限速控制主要是从驾驶员的安全性和舒适性方面来考虑,对于驾驶员的安全性和舒适性选用的约束条件主要是从时间和空间方面来衡量[16]。在时间上,对于高速公路同一控制点相邻时段限制速度值不能过大,若不能超过σ,对于路段m有以下关系式
(11)
(12)
式(12)中:vd为道路设计速度,vmin为最低限制速度值。
在空间上,对于高速公路同一时段相邻控制路段的限制速度差值也不应变化过大,若不超过ε,则有
(13)
式中σ、ε的具体取值结合实际案例进行分析,σ一般取10 km/h、ε一般取20 km/h[18]。
影响出入口匝道控制率的主要是车辆的排队长度,为避免发生匝道排队溢出现象,匝道排队长度不应超过匝道规定的最大允许长度ωqmax,如超过最大允许长度,那么入口匝道率应大于控制算法的推荐值R(k)[19],可以表示为
r(k)>R(k),当ω(k)≥ωqmax,
(14)
式中:r(k)为入口匝道率,ω(k)为匝道排队长度,ωqmax为匝道最大允许长度。
因此,结合上述分析的约束条件,本文提出的基于MPC的高速公路移动瓶颈协同控制模型的最优化问题可以表示为
(15)
由于优化目标选取了多个最小化成本函数,因此该最优化问题为多目标优化问题。对于该目标最优解可能有多个。该问题的约束条件是基于LWR模型建立的,因此对于该目标问题求解可以采用一阶Godunov格式的有限体积法进行求解,它可以容纳任何类型的通量函数。利用Newton迭代法及一些必要的计算可以得到格式中的数据流。
3 仿真与结果分析
为了根据所选择的交通性能指标优化路段上的交通,本章提出了一种慢速车辆与周围交通相互作用影响控制方法。为了计算最优控制最小化所选定的交通性能指标,考虑了一个通用系统,利用模型预测控制方法处理非线性系统、多目标优化和约束。
MPC是一个迭代过程,在对所选成本函数进行评估,预测系统演化的基础上控制变量的最优值,通过迭代优化算法要求,在每个迭代过程中,模拟运行系统进行反复修正。
本章通过优化控制策略研究如何改善某一高速公路路段移动瓶颈的交通状况,利用Matlab编写一个交通流通用模拟器,其中采样周期为0.1 h,控制周期为0.6 h,最大车速vf为120 km/h,在该程序中输入的变量有:
① 以geometry结构编码的关键网络函数:路长、道路最大车速、临界密度、流量密度函数。
② 包含所有离散矩阵的密度结构:不同时的密度。
③ 时间步长。
输出结果有:行程时间TTT、延误时间TD、高速公路交通排队长度以及排队长度所占路长的百分比。
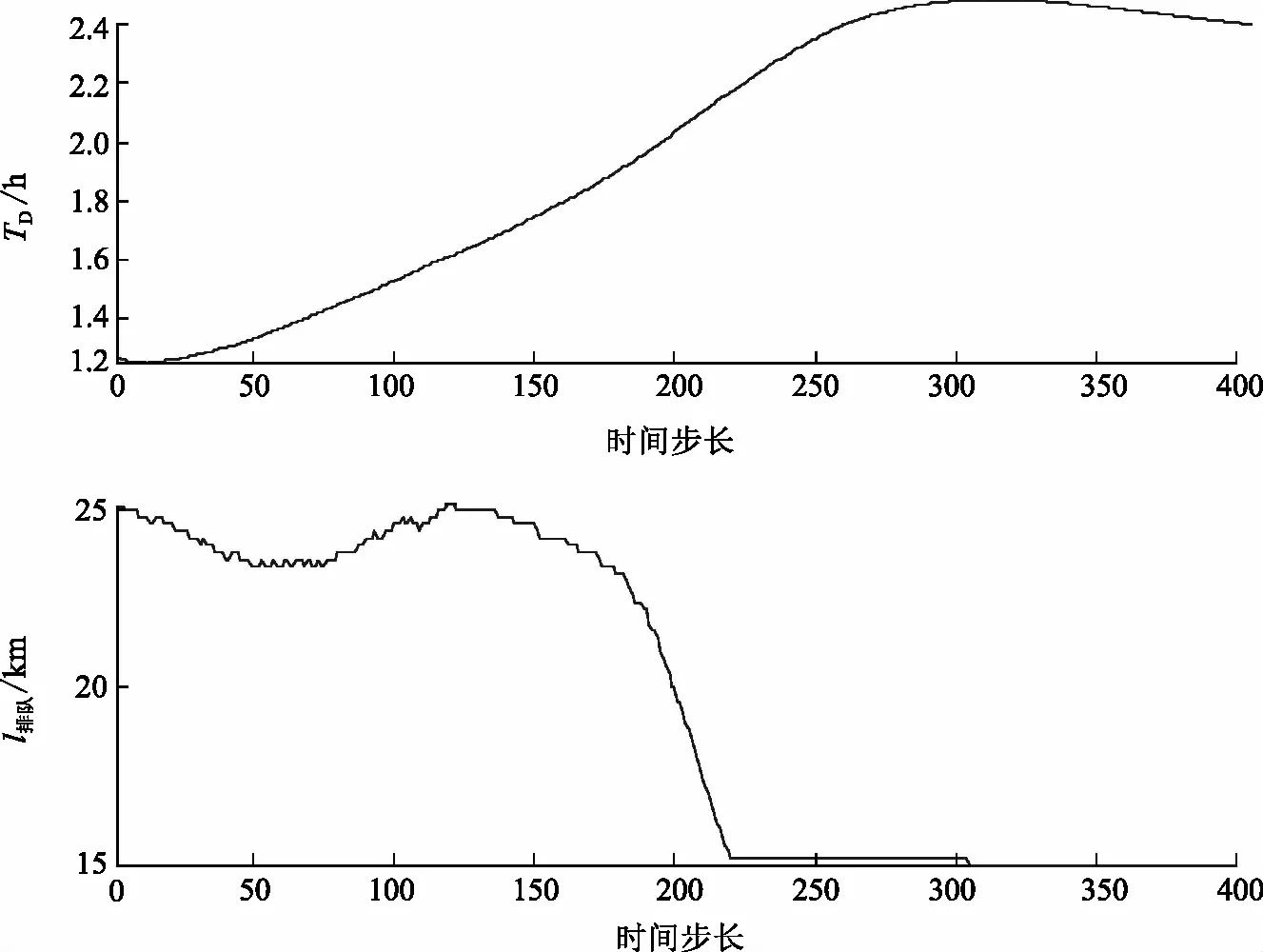
图5 控制条件下优化目标变化情况Fig. 5 Optimize target changes under controlled conditions
根据交通流模拟器利用Matlab对优化目标进行宏观仿真分析,其中,根据优化目标函数计算公式可以得知行程时间与延误时间、高速公路交通排队长度与排队长度所占路长的百分比变化情况一致,故本章输出变化情况选取相应参数延误时间和排队长度进行分析。图5为MPC控制条件下不同时间步长优化目标函数变化情况,从图中可以看出在时间步长100至200之间排队长度达到最高峰,之后排队车辆开始消散,在步长300左右对应排队车辆最少,延误时间最长,符合实际情况,因此可以通过选择合适的时间步长研究交通性能指标变化情况。
通过调节不同采样周期的流量来调节输入流从而达到利用受控车辆来调节车辆目的,本章旨在模拟流量控制条件下的密度变化情况。图6为在MPC控制条件下,每公里高速公路上初始车辆数依次为125、100、50、20、80、120辆条件下道路密度变化情况,从图中可以看出在控制周期下初始车流量由大变小再变大时密度也发生相对应变化(对应于图中低密度区域所占的面积)。在控制条件下不同的车流量会造成高速公路不同程度的拥挤情况,因此可以通过调节不同采样周期的流量初始值调节输入流来达到较好的驾驶员舒适感。
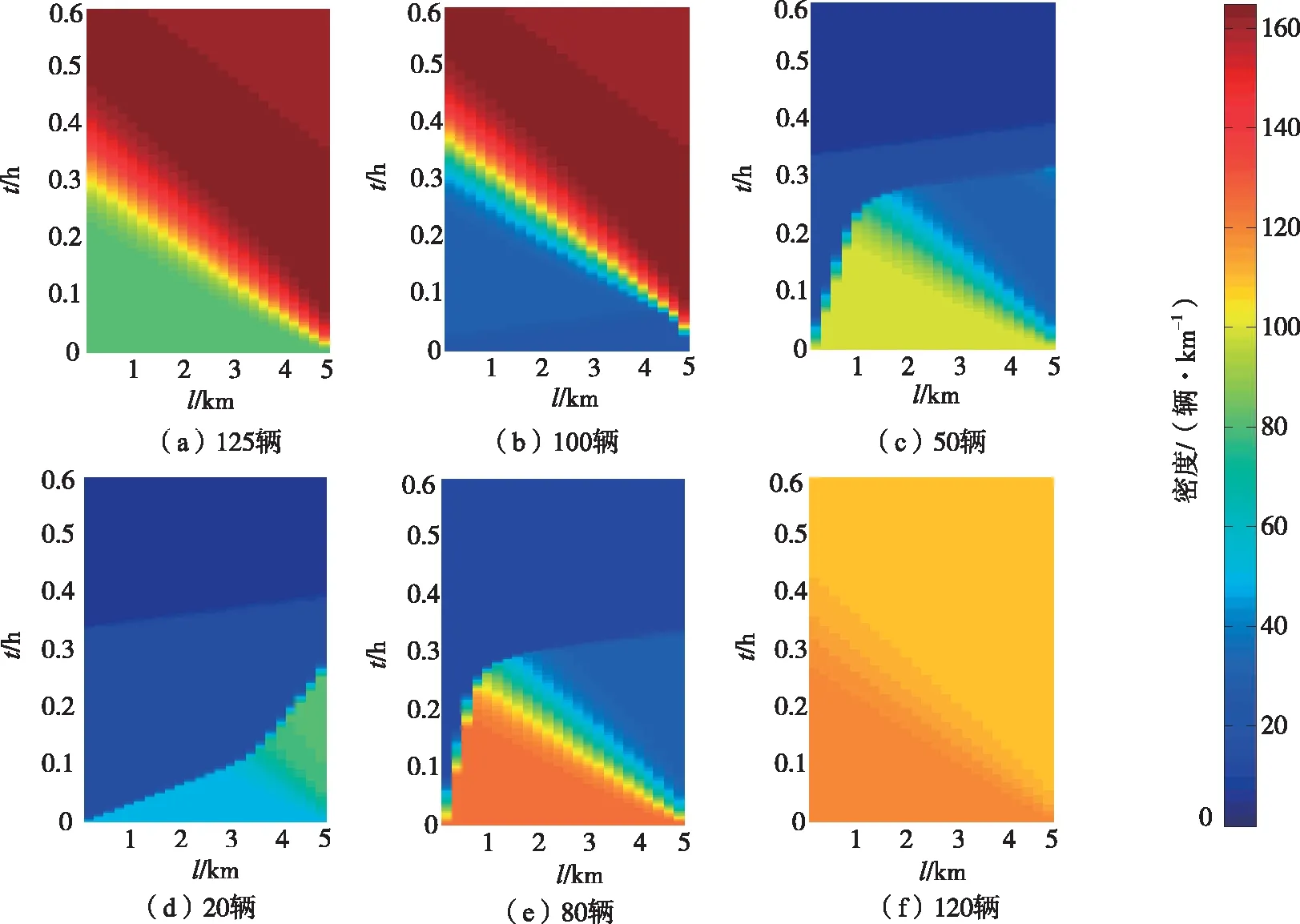
图6 不同输入流条件下车辆密度变化情况Fig. 6 Vehicle density changes under different input flow conditions
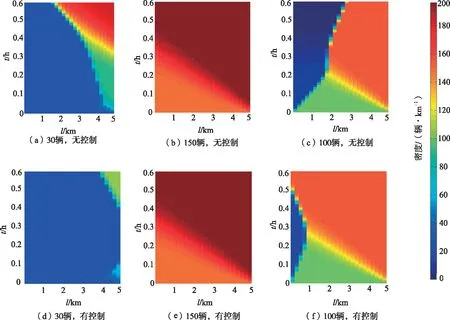
图7 无控制和MPC控制下的密度变化情况Fig. 7 Density changes without control and under MPC control conditions
图7为有无MPC控制条件下初始车辆数为30、150、100条件下调节不同采样周期变量密度的变化情况。在无控制和MPC控制条件下,高速公路交通流状态会受到慢车车辆车速的影响而减速(对应于高密度区域),但从图7中可以看出密度在2种情况下分布有所不同,在MPC控制条件下车辆对交通流有更大的影响,对应于中间路段的低密度区域(低密度区域更宽)。
根据交通流模拟器输出结果的平均数值,对有无MPC控制2个研究案例相对应的交通性能指标(优化目标)进行评估,由表1可知,在MPC控制情况下计算的优化目标相比无控制条件下均有所改善,从表中数据可知有控条件相比无控制条件下较好地减少了行驶时间和排队长度,降低了延误,有效地提高乘客的舒适性,较好地达到了MPC控制效果,具有较好的应用价值。

表1 无控制和有控条件下交通性能指标比较
4 结论
从交通建模仿真的角度出发,针对高速公路移动瓶颈所带来的拥堵问题和传统交通控制系统的不足,考虑到智能网联汽车(ICV)、车路协同技术的发展以及自动驾驶汽车在交通网络中的渗透率将不断上升的现实,利用受控车辆来调节车流具有一定的发展前景。本文提出基于MPC的流量控制研究,根据约束条件和优化目标建立内部预测控制模型,利用Matlab编程中Godunov格式的有限体积法进行求解并进行宏观仿真分析。仿真结果表明,通过优化控制不同采样周期输入流量值来协调车辆进行控制,有效地提高了交通性能指标,较好地达到了MPC控制效果,具有较好的应用价值。今后的研究重点将考虑实际路网与驾驶员的动态诱导及协同控制。
